
IPhone – гаджет универсальный, сочетающий кроме функций смартфона, еще и плеера, устройства для интернет-серфинга, игровой компактной консоли, органайзера и универсального пульта для управления различными гаджетами, в первую очередь новинки – робошара Sphero 2.0, недавно появившегося на российском рынке.
Обзор

Премьера прошла в 2013 году в Нью-Йорке. Возможности второго поколения роботизированного мяча — Sphero 2.0. продемонстрировал Adam Wilson — ведущий разработчик ПО Sphero и соучредитель Orbotix компании. Сегодня и в России можно Orbotix Sphero 2.0 купить.

Робот Sphero 2.0 предназначена для веселого времяпрепровождения взрослых и детей. Новый интересный девайс тоже управляется с iPhone, возможности которого, казалось бы, использованы и реализованы все.
Новинка Sphero 2.0 обязательно понравится мужчинам, поскольку у сильной половины есть две вещи, которые их притягивают в течение всей жизни, одной из них является любовь к игрушкам.
Новинка Orbotix Sphero 2.0 сродни так нашумевшим квадрокоптерам, которыми не так давно поглощали внимание всех мужчин. Робот-шар также имеет сегодня невероятную популярность. Ведь играть этой высокотехнологической игрушкой с друзьями необычайно захватывающе и весело, да и самому можно поразвлечься.
Что внутри
Шар Sphero 2.0, изготовленный из белого цвета поликарбоната, покрыт надежной оболочкой, внутри у него настоящая россыпь различных датчиков:
- контроллер и акселератор;
- гироскоп и Блютуз;
- зарядка беспроводная и батарея;
- светодиоды и пр.
Важно: Учитывая оснащение Sphero 2.0 тонкой электроникой, специально его испытывать на прочность не стоит, т.е. ронять мяч на твердую поверхность с высоты, превышающей 15 сантиметров, запрещается.
Центр тяжести у рестайлингового шара робота Sphero 2.0 опустился ниже. Внутри у него теперь имеется самобалансирующееся двухколесное электроприводное устройство «Sigwey».
 Робот Дроид "STAR WARS BB-8" на радиоуправлении
Робот Дроид "STAR WARS BB-8" на радиоуправленииДизайн
Для Sphero 2.0 характерны приятные тактильные свойства. Поверхность его абсолютно гладкая. С внешней стороны он защищен крепкой поликарбонатовой оболочкой, а внутри у него спрятана уникальная Smart Robot технология, которая запатентована разработчиком.
При осмотре Sphero 2.0 шара, пользователь не обнаружит ни единого отверстия, ни крышки, скрывающей отсек, где могла бы быть спрятана батарея или элементы питания, потому что для подзарядки разработана специальная станция, вошедшая в стандартную комплектацию.
Защитная оболочка
Водонепроницаемая верхняя оболочка защитная может быть сплошной или прозрачной, позволяющая видеть начинку Sphero 2.0, что делает гаджет еще более зрелищным, а пользователю предоставляет для выбора два варианта.
Запуск
Чтобы игрушку Sphero 2.0 запустить, ее необходимо сильно встряхнуть. Шар замигает тут же разноцветными светодиодами. Удар большей силы или сжатие активирует многоцветное свечение.
Важно: Предпочитаемые цвета можно задать, воспользовавшись приложением. Как только любое, совместимое с девайсом приложение запущено, происходит автоматическое соединение с шаром Sphero 2.0.
Станция
Она компактная и небольшая, питающаяся от сети. После установки на нее Sphero 2.0 робошара, он находится на ней до 3 часов (чтобы добиться 100% зарядки). После этого, шар готов к использованию, о чем пользователя оповещает световой индикацией.
Приложения
Для новинки Sphero 2.0 предусмотрено достаточно большое количество приложений, среди которых одноименное, являющееся основным, используемым для первого контакта с Sphero 2.0 роботом, настройки нужного свечения, скорости (регулируется от незначительной до 7 метров в секунду). Можно также произвести с его помощью калибровку, если пользователю важно, например, чтобы сверху находился всегда логотип.
Важно: Помимо этого, оно предназначено для управления гаджетом Sphero 2.0 (способов предусмотрено несколько).
Отдельного внимания заслуживает Draw Drive приложение, позволяющее нарисовать на экране смартфона произвольный маршрут, выбрать скорость, а шар Sphero 2.0 его в реальности повторит с большой точностью и указанной скоростью.
Еще интереснее прорисовать маршруты для нескольких робошаров и наблюдать, как они станут их проходить.
 Как использовать китайские шары здоровья. Шары здоровья — упражнения
Как использовать китайские шары здоровья. Шары здоровья — упражненияПриложений достаточно много, но и они когда-то перестанут интересовать, наскучат животные, гоняющиеся за Sphero 2.0. Но, всегда останется в резерве способ весело провести время с чудесной игрушкой. Поскольку Sphero 2.0 устойчив к влаге, да еще получил силиконовый защитный чехол, можно с товарищами организовать состязания в ловкости прямо в парке, устроив там сложнейшую трассу.
Очки, заработанные в игре пользователем, можно использовать для абгрейда девайса Sphero 2.0. Чем больше очков, тем сложнее уровень (демонстрируется информационным превью) и шире возможности игрушки.
Способы контроля
- С помощью виртуальной консоли, где центрируется автоматически Sphero 2.0, как только палец пользователя «отпустит» экран;
- Стандартные касания к сенсору;
- Используя акселератор, т.е. наклоняя смартфон (он считается наиболее удобным).
Назначение
Это только кажется, что особого веселья от игры с управляемым шаром Sphero 2.0 получить нельзя. Но, стоит попробовать, чтобы понять, насколько это мнение ошибочно.
И все же, основной фишкой робошара является интеграция и софт с мобильными гаджетами.
С Sphero 2.0 можно устроить (конечно, виртуально) настоящий зомби-апокалипсис или сыграть в игру, схожую с биллиардом. Это намного интереснее, чем просидеть весь вечер за телевизором.
Когда одному наскучит играть, привлекать можно домашних питомцев (не крупных, чтобы не разгрызли шар) и наиболее интересные моменты снимать на видео или делать фото.
Интересно с друзьями посоревноваться (девайс Sphero 2.0 и создан для этого). Ведь намного интереснее узнать, чей шар быстрее доберется к финишу, чем просто катать его по квартире.
Итог: За столь необычный девайс, разработчикам огромное спасибо: их старания увенчались успехом, о чем свидетельствует популярность Sphero 2.0. Игрушка получилась яркой интересной и нестандартной.
Отличие от предшественника
Как уже было сказано, именно на коллективное времяпрепровождение ориентировался разработчик чудного девайса. Шару Sphero 2.0 можно устроить тест на проходимость, провести его по извилистой трассе (хотя бы попытаться), попробовать его научить сложным трюкам (сразу оговоримся, что сделать это достаточно сложно).
Новая модель Sphero 2.0 отличается большей скоростью и более ярким свечением, чем предшественник.
К ним добавилось еще несколько безделушек, которые пришлись по душе пользователям всех возрастных групп:
 Как сделать шар. Воздушный шар своими руками
Как сделать шар. Воздушный шар своими руками- трамплинчики с подсветкой;
- сумка для переноски;
- чехол-вездеход и пр.
Рекомендуем:
- Bradex: обзор особенностей и внешности робота, польза и цена игрушки
- MZ Optimus Prime: описание возможностей и внешности трансформера, где купить недорого и безопасно
- Hexbug Spider: обзор новинки, дизайн, возможности, управление, цена
Обновление
Производитель очень старался сделать его простым, чтобы разобраться мог каждый пользователь, и выбрать по своему вкусу. Есть возможность менять для левой и правой рук интерфейсы, изменять контроль с помощью джойстика на управление с помощью наклона смартфона, выбирать предпочитаемое свечение из миллиона предложенных вариантов, а также его яркость.
После тренировки есть возможность стать настоящим асом (сферическим).
Модернизированный робомяч Sphero 2.0 остался внешне таким же, как и в первом поколении — белым и круглым, украшенным улыбающейся рожицей. А вот ПО изменилось кардинально. Новинка стала значительно отзывчивее, быстрее и ярче.
Поработали и над ошибками, которые у пользователей вызывали немало нареканий –отсутствием игровых приложений.
Теперь у модернизированного Sphero 2.0 шара -робота открытый программный код, что любому программисту дает возможность написать для него свою программу.
А собственных предложений предлагается пользователям сразу 20 и еще до 10 приложений разработчиков сторонних, которые регулярно дополняются.
Одни из них новую разработку Sphero 2.0 заставляют танцевать, другие –светиться всеми цветами радуги, третьи позволяют управлять персонажами виртуальных игр.
Каждое успешное прохождение версии поднимает пользователя на более высокий уровень, открывая доступ к новым трюкам.
Важно: Новинка Sphero 2.0 будет отличным развлечением для людей всех возрастов, но, управлять проще не самым маленьким и, безусловно, использовать его веселее в компании.
Упаковка
Крепкая картонная коробка черного цвета служит новинке надежной защитой при транспортировке ее к месту назначения и хранении. На ней изображен симпатичный и улыбающийся мяч, даны его характеристики, указана комплектация и возможности.
Игры в воде
Благодаря водонепроницаемости, Sphero 2.0 может плавать. Чтобы движения в воде были более эффектными, потребуется приобретение дополнительного аксессуара – силиконового чехла с поверхностью в виде многочисленных шишечек (Nubby). Помимо этого, шипованный чехол используют для игр на улице. Он предлагается в различных цветах и обеспечивает лучшее сцепление с поверхностью. Приобрести его возможно там же, где будете Sphero 2.0 покупать.
Комплектность
- Модернизированный робот-шар 2 поколения;
- Выдвижная подставка — пандус с углублением в виде полусферы – 2 шт.;
- Зарядный модуль;
- Карта для мгновенного запуска;
- Документация.
Характеристики
- Синхронизация – с мобильными гаджетами на базе iOS И Андроид с помощью Блютуз;
- Радиус действия – 30 м;
- Скорость максимальная –до 7 м/с;
- Эффекты –звуковые (щебечущие звуки, наделяющие индивидуальностью и очарованием) и световые (меняет свечение в широком диапазоне);
- Длительность работы без подзарядки –до часа;
- Полное пополнение заряда – до 3 часов;
- Зарядка – на специальной подставке с помощью «гнезда» и внутреннего литий-полимерного аккумулятора;
- Подпитка — при помощи индукционной беспроводной зарядки;
- Размеры — диаметр 74 мм (2,91 дюйм);
- Масса – 168 грамм (5,93 унции).
Итог: Игрушка действительно уникальная. Очень яркая, она приводит в первые мгновения в «дикий» восторг. В дальнейшем тяга поиграть с ней только усиливается, поскольку она открывает огромные возможности, включая программирование. Дети и их взрослые родители рискуют надолго подружиться с необычным роботом, забыв о всех ранее существовавших привязанностях.
Плюсы
- Прекрасный дизайн;
- Много приложений, открывающих и без того богатые возможности;
- Надежность;
- Работа от встроенного источника;
- Непродолжительная зарядка батареи;
- Звуковые эффекты и светодиодная подсветка.
Минусы
О минусах пока не пишут – все в восторге от подаренного девайса.
Стоимость
Этот «прикольный» гаджет стоит немалых денег, тем не менее, многие желают иметь робот шар Sphero 2.0.
Купить его безопасно можно в интернет-магазинах:
| Где приобрести в России | Цена |
| https://tech-bit.ru/sphero-2.0 | 9990 |
| https://madrobots.ru/p/robotizirovannyy-shar-orbotix-sphero-2-0/ | 11490 |
| https://market.yandex.ru/product—robot-sphero-sphero-2-0/1725462819 | 9250 |
| https://robotbaza.ru/product/robot-shar-sphero-20 | 13900 |
| https://www.icover.ru/catalog/product/orbotix_sphero_2_0_myach_upravlyaemyy_s_iphone_ipod_ipad/ | 9990 |
Видео: Meet Sphero 2.0
news.detail : ajax-tape !!! —> Прочие аксессуарыSpheroобзоры аксессуаров —>


История этого проекта начинается в 2014 году, когда я учился на 4-м курсе в ведущем техническом вузе России на кафедре «Робототехнические системы». В это время я уже начал задумываться над темой диплома и искал проект, который был бы интересен мне, и при этом в нем присутствовала некоторая новизна. И вот однажды, увидев видео шаробота Rezero, я с друзьями захотел попробовать повторить успех. Кому интересно, что из этого получилось — прошу под кат.

Введение
В начале хотелось бы поговорить о достоинствах шаробота. Благодаря единственной точке контакта с поверхностью, шаробот одинаково легко передвигается во всех направлениях, являясь чрезвычайно подвижным и манёвренным, по сравнению с обычными колесными роботами. Манёвренность шаробота ограничена только его динамикой, в отличие от механических ограничений, налагаемых колёсами (например, невозможность движения боком).
Следующее важное достоинство — робот может быть высоким, и чем выше он будет, тем он будет устойчивее. Почему устойчивее? Это видно из уравнения динамики обратного маятника. Ускорение отклонения от вертикального положения равновесия обратно-пропорционально расстоянию до центра масс, т.е. более высокий обратный маятник будет медленнее падать. Это снижает требования к скорости реакции системы управления, но, возможно, увеличивает момент, который должны развивать привода.
Еще одно преимущество — он может ездить по наклонным и подвижным поверхностям, например, палуба корабля или пол самолета при взлете. Да и согласитесь, движется он гораздо красивее, чем обычные колесные роботы.
Один из главных недостатков шаробота — возможность потери вертикального положения равновесия. Но лично я думаю, что это вполне решаемая инженерная задача. Инженеры роботов Aido и Mobi решили ее следующим образом: при превышении некоторого угла отклонения выдвигаются “ноги”, чтобы робот не потерял устойчивость.
Мой рассказ состоит из следующих частей: — Математическая модель — Разработка алгоритмов управления — Конструкция — Аппаратно-программное обеспечение — Результаты
1 Математическая модель
Вывод уравнений движения необходим для дальнейшего синтеза управления и моделирования движения. В этом разделе будет немного математики и механики.
На данный момент все существующие математические модели шаробота составлены с учетом некоторых упрощений с помощью уравнений Лагранжа 2-го рода. А так как шаробот является неголономной механической системой, то применять уравнения Лагранжа 2-го рода к такой систему некорректно. В роботе CMU модель шаробота рассматривается как три независимые плоские модели, тем самым не учитывается взаимовлияние этих моделей. В Rezero разработали трехмерную математическую модель, в которой не учитываются гироскопические эффекты, возникающие при вращении омниколес.
Я поставил цель создать наиболее полную математическую модель робота с минимальным количеством допущений. В достижении этой цели мне помог мой научный руководитель С.Л. Крутиков, за что я выражаю ему огромную благодарность.
1.1 Кинематика
Для кинематического описания системы я ввел подвижные системы координат, показанные на рисунке.
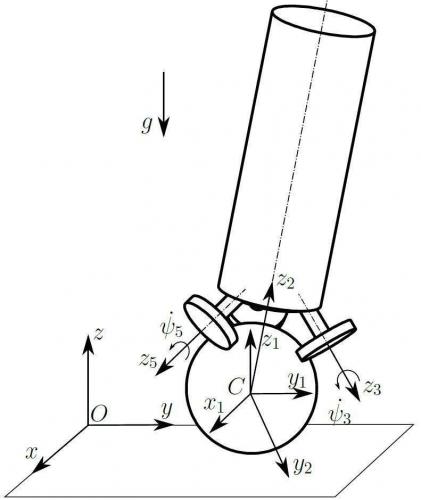
Инерциальная система координат обозначена как 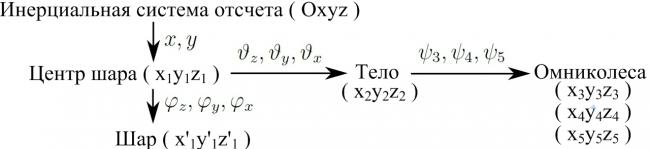
Для описания положения системы используется следующий вектор обобщенных координат:
где 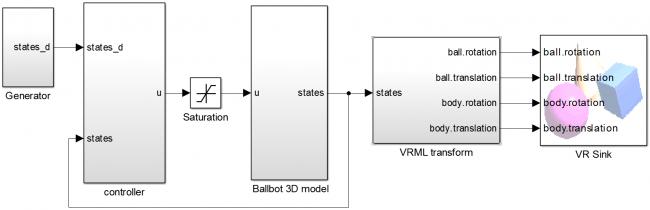
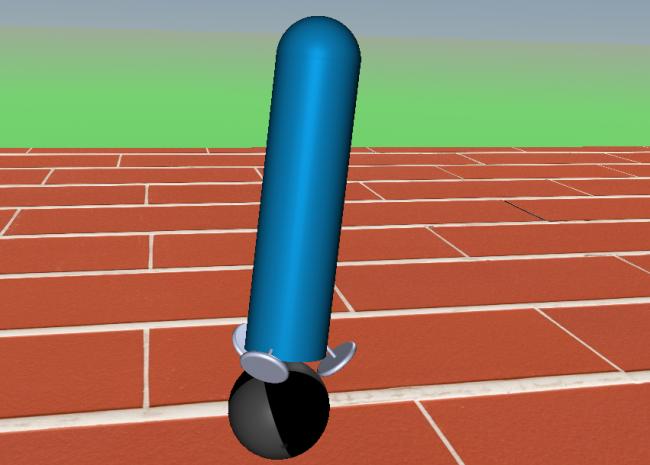
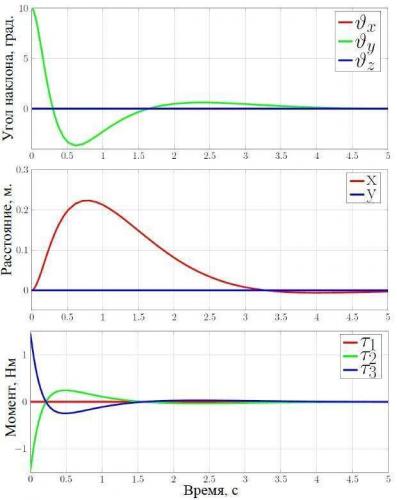
Для трехмерной визуализации была сделана простая модель шаробота в SolidWorks. Затем она была экспортирована в формате vrml и добавлена в блок VR Sink.
3 Конструкция
Конструкция робота разработана в CAD системе Siemens NX. На основании построенной модели были определены массовые и инерционные характеристики звеньев робота.

Конструкция состоит из двух алюминиевых оснований. На нижнем основании закреплены три двигателя, которые приводят в движение омниколеса. Верхнее основание крепится к нижнему с помощью амортизаторов и направляющих. Задача амортизаторов заключалась в уменьшении вибраций верхней части корпуса, где находится вся электроника, правда на практике это не помогло.
Полки сделаны из оргстекла для облегчения конструкции. На них располагается вся бортовая электроника: аккумулятор, контроллеры приводов, микроконтроллер, инерциалка и др.
В качестве шара используется баскетбольный мяч диаметром 240 мм. Держатели шара прижимают его к омниколесам, тем самым увеличивают трение. К сожалению, их не получилось изготовить, так как на нашей кафедре нет 3D принтера, а печатать на заказ дорого, т.к. они не маленькие и коэффициент заполнения нужен большой для прочности.
Омниколеса были приобретены на Aliexpress по 120$ за штуку. Самая дорогая часть робота, после приводов, конечно.
Все металлические детали изготовлены из дюралюминия на заказ на одном московском заводе. На этом же заводе нам сделали полки из оргстекла. Заказ вышел на сумму 30 000р, примерно.
Немного фотографий сборки с комментариями
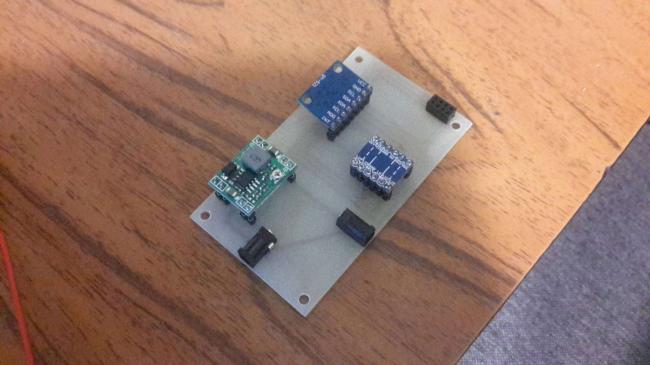
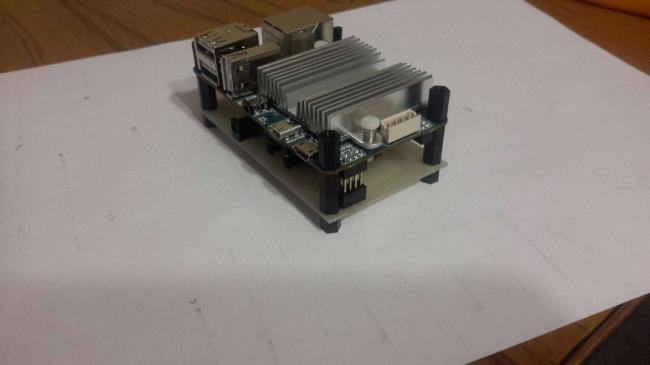
Друг помог мне развести плату, на которой находятся DC-DC преобразователь, IMU и логический преобразователь уровней для I2C. Сверху втыкается ODROID


4 Аппаратно-программное обеспечение
Почти все аппаратные компоненты шаробота представлены на функциональной схеме. Скажу пару слов про каждый элемент, двигаясь «снизу вверх».
4.1 Привода и контроллеры приводов
Всех сложнее было найти привода и контроллеры приводов. На выходе LQR регулятора у нас момент, следовательно надо иметь контроллер с возможностью управления по току(т.е. по моменту). Видимо, эта задача встречается очень редко в повседневной жизни, и мы нашли только одно доступное по деньгам решение — Dynamixel. Мы купили и попробовали привода Dynamixel MX64, в которых есть режим управления по току. К сожалению, их быстродействия не хватало для стабилизации робота.
Я уже было потерял надежду на создание реального шаробота, но к счастью нам помог Ярослав из НУЦ «Робототехника» и предоставил на некоторое время три привода Maxon с контроллерами, за что мы ему очень благодарен. В итоге у нас оказался бесколлекторный двигатель постоянного тока Maxon EC-max 30 40Вт со следующими характеристиками:
- Номинальное напряжение 24В
- Номинальная скорость вращения 7220 об/c
- Номинальный момент 33.8 мНм
- Удерживающий момент 160 мНм
Планетарный редуктор Maxon GP 32 с передаточным числом n=14 и контроллер привода Maxon EPOS 24/5, который имеет режим управления по току.
Как вы можете заметить, привода не очень мощные и передаточное число маленькое, поэтому момента на выходе едва ли хватает для стабилизации шаробота. У Rezero, например, используются двигатели 200Вт и редуктор с передаточным числом 51.
4.2 Микроконтроллер, инерциальный модуль, трансивер
В качестве микроконтроллера использовался STM32F4-Discovery, который имеет необходимые нам интерфейсы: CAN, UART и I2C. Он получает данные с гироскопа и акселерометра по I2C и энкодеров по шине CAN. На основе полученных данных рассчитывает управление и отправляет задание на контроллеры приводов по шине CAN. Чтобы не реализовывать протокол для связи с EPOS контроллерами самому, я использовал библиотеку libepos. Для того, чтобы подключить STM’ку к CAN сети необходим приемопередатчик CAN(трансивер) за 4$.
В качестве инерциального модуля мы использовали плату GY-521 за 3$ на основе микросхемы MPU6050, которая включает в себя 3-х осевой гироскоп и 3-х осевой акселерометр. Для обработки показаний этих датчиков я использовал фильтр Маджвика, который в последнее время так полюбили коптероводы.
Для упрощения разработки под STM я использовал STM32Cube HAL(hardware abstraction layer).
Частота на которой работает управление равна примерно 300 Гц, т.е. 300 раз в секунду мы считываем показания всех датчиков, рассчитываем управление и отправляем задание на привода. Все это происходит в бесконечном цикле, который можно представить в виде следующего псевдокода:
int main() { initialize_imu();/* инициализация IMU по I2C */ initialize_motors(); /* инициализация двигателей по CAN */ while (1) { read_imu(); /* чтение и фильтрация данных IMU */ get_omniwheels_speed(); /* чтение данных энкодеров по CAN */ /* поступила команда по UART от odroid */ if (uart_rx_flag) { uart_rx_flag = 0; struct joystick_data* joystick = (struct joystick_data*)UARTdev_Get_RX_buf(); process_joystick_input(joystick); } calculate_control(); /* вычисление управления */ set_torque(); /* отправка задания на привода по CAN */ } }4.3 Одноплатный компьютер, аккумулятор, DC-DC преобразователь, джойстик
Бортовой одноплатный компьютер ODROID U3 принимает данные от джойстика через Bluetooth адаптер и передает их на микроконтроллер через UART. На нем установлена операционная система lubuntu c Linux ядром 3.8.13.26-rt31 c поддержкой реального времени.
Свинцово-кислотный аккумулятор Delta 12045 ёмкостью C = 4.5 Ач. Его хватает примерно на час работы.
Напряжение питания одноплатного компьютера Odroid-U3 5В, максимальный потребляемый ток 2А. Т.к. источник питания 12В, необходим понижающий LM2596S DC-DC преобразователь за 2$.
Для управления шароботом используется Bluetooth джойстик Terios. Джойстик передает команды по Bluetooth на ODROID, в котором стоит Asus USB-BT400 адаптер. Для чтения команд джойстика я использовал следующую библиотеку. Поступившая команда парсится, пакуется и отправляется по UART на STM32, где на прием каждого байта происходит прерывание.
Так же к ODROID можно подключится по SSH. При запуске одройд создает Ad-hoc сеть через WiFi адаптер.
Результаты
Итого у нас получилось собрать работающего шаробота. На реализацию этого проекта ушло ровно 2 года. Скажем так, у нас не получилось приблизиться к результатам Rezero, так как не было таких человеческих, производственных и финансовых ресурсов как у студентов из Швейцарии. Думаю, если бы были более мощные двигатели и более продвинутый инерциальный модуль, то результаты были бы на порядок лучше.
Исходный код я не открываю по некоторым причинам. Если хотите знать детали реализации — напишите нам, мы с удовольствием поделимся с вами наработками. Двигатели пришлось вернуть и на данный момент «железяка» стоит без них. Возможно, проект будет дальше развиваться студентами, если найдутся подходящие движки и будут желающие. Например, было бы интересно разработать нелинейные алгоритмы управления и улучшить алгоритм фильтрации IMU.
Я достаточно поверхностно рассказал про процесс разработки, так что буду рад ответить на ваши вопросы.
Используемые источники:
- https://motocarrello.ru/jelektrotehnologii/roboty-igrushki/sphero-2-0.html
- https://m.iguides.ru/main/accessories/obzor_sphero_2_0_vysokotekhnologichnaya_igrushka_dlya_vsekh_vozrastov/
- https://habr.com/post/306456/

 Магический плазменный шар Plasma light - отзывы
Магический плазменный шар Plasma light - отзывы Обзор игрушки Sphero Ollie от Orbotix. Скоростной робот-трюкач
Обзор игрушки Sphero Ollie от Orbotix. Скоростной робот-трюкач Обзор копии дроида из «Звездных войн», или что умеет робот BB-8, характеристики и цена
Обзор копии дроида из «Звездных войн», или что умеет робот BB-8, характеристики и цена Светильник плазменный шар Plasma Light большой NL-005
Светильник плазменный шар Plasma Light большой NL-005