4 апреля 2019
 Рис.1 Трёхфазный бесколлекторный двигатель BLDC (двигатель стиральной машины с прямым приводом) Рис.1 Трёхфазный бесколлекторный двигатель BLDC (двигатель стиральной машины с прямым приводом)
|
Содержание:1. Двигатель стиральной машины с прямым приводом2. Устройство двигателя2.1 Ротор 2.2 Статор3. Система управления BLDC двигателем4. Неисправности и диагностика двигателя5. Преимущества и недостатки BLDC двигателя |
Пожалуй уже каждый слышал о стиральных машинах с прямым приводом барабана. Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Двигатель стиральной машины с прямым приводом, представляет собой трёхфазный бесколлекторный двигатель постоянного тока, отчасти похожий на шаговый двигатель, но это не совсем так. В иностранной литературе его ещё часто называют BLDC (Brushless Direct Current Motor — бесщёточный мотор постоянного тока), для удобства мы тоже будем применять эту аббревиатуру.Такой двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Различают два вида подобных двигателей:Inrunner, у которых магниты ротора находятся внутри статора с обмотками, иOutrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.В этой статье мы ознакомим Вас с устройством двигателя от стиральной машины LG.<>
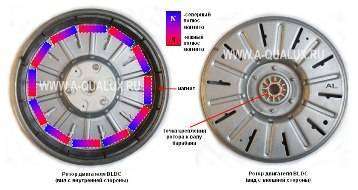 Рис.2 Ротор двигателя стиральной машины LG с прямым приводом Рис.2 Ротор двигателя стиральной машины LG с прямым приводом |
Ротор BLDC — вращающаяся часть двигателя (Рис.2) По форме напоминает чашу, к внутренней стороне которой специальным клеем крепятся магниты прямоугольной формы. Магниты всегда имеют чётное количество и установлены с чередованием полюсов. В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора. |
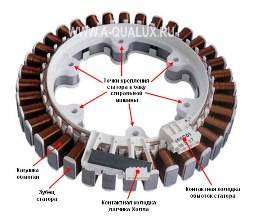 Рис.3 Статор двигателя стиральной машины LG с прямым приводом Рис.3 Статор двигателя стиральной машины LG с прямым приводом |
Статор BLDC — неподвижная часть двигателя и крепится к задней части бака стиральной машины (Рис.3) Статор состоит из нескольких листов магнитопроводящей стали заключённый в пластиковый каркас, который служит изолятором. В целом, каркас статора напоминает круг с прямоугольными зубьями. На каждый зуб статора наматывается катушка. Обмотка трёхфазного бесколлекторного двигателя изготовлена из медной проволоки толщиной 1 мм. Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом. Как известно, в трёхфазных двигателях, обмотки соединяют по схеме звезда или треугольник. В нашем случае, обмотки статора соединены по схеме звезда, т.е. концы фаз имеют общую точку (Рис.4) |
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5). Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)<><>
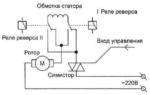
| Рис.4 Соединение обмоток по схеме «звезда» | Рис.5 Воздействие магнитных сил на ротор | Рис.6 Распределение магнитных сил в обмотке с несколькими зубьями |
<>В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U
Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
Стоит отметить, что система управления двигателем BLDC и схема её реализации аналогична схеме управления трёхфазным асинхронным двигателем описанной в другой нашей статье. Что бы в точности не повторяться, поясним всё же немного по другому.Управление двигателем с прямым приводом построено на инверторе напряжения с широтно-импульсной модуляцией. Инвертор — (от лат. inverto — поворачивать, переворачивать) — элемент вычислительной схемы, осуществляющий определённые преобразования сигнала изменяемой амплитуды и частоты. К примеру, в инверторе, сетевое напряжение 220 вольт с частотой 50 Гц, преобразуется в постоянное напряжение, а параметры питания обмоток статора двигателя могут колебаться от 0 до 120 вольт с частотой до 300 Гц.Двигатель постоянного тока имеет три вывода (т.е. три фазы), на которые в разный момент времени подаётся «+» и «-» питания. Это реализуется при помощи IGBT (биполярных транзисторов с изолированным затвором) представляющие электронные силовые ключи, включённые по мостовой схеме (Рис.8)
Рис.8 Условная схема силовой части инвертора и обмоток двигателя подключённых по схеме «звезда»
Замыкая ключ SW1 подаётся «+» на фазуV, а замыкая SW6 подаётся «-» на фазуU. Таким образом, ток потечет от «+» выпрямителя через фазыV и U. Для обеспечения обратного направления, открывается SW5 и SW2. В этом случае ток потечет от «+» выпрямителя через фазыU и Vв обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний и один нижний ключ.При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем, нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ).Дадим определение этим терминам: Широтно-импульсная модуляция (ШИМ) — это управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. А скважность — это отношение периода следования (повторения) сигнала к длительности (широте) его импульса.На (Рис.9) представлен график, иллюстрирующий применение трёхуровневой ШИМ для управления электродвигателем, которая используется в приводах асинхронных электродвигателей с переменной частотой. Напряжение от ШИ-модулятора, подаваемое на обмотку двигателя показано в виде прямоугольных импульсов. Пунктирной линией грубо изображён магнитный поток в статоре двигателя. Магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.Поэтому, ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью. Таким образом, изменяется действующее напряжение от нулевого до напряжения питания.Назревает вопрос: зачем нужно менять скважность, зачем эта частота и для чего это всё нужно? Дело в том, что слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования оборотов двигателя.
 Коллекторный электродвигатель: достоинства, недостатки, область применения
Коллекторный электродвигатель: достоинства, недостатки, область примененияРис.9 График иллюстрирующий напряжение от ШИ-модулятора, подаваемое на обмотку двигателя.
- низкий уровень шума
- относительно простая конструкция
- особое позиционирование двигателя в стиральной машине, позволяющее снизить колебание бака
- отсутствие приводного ремня, из-за которого терялась часть полезной энергии двигателя на преодоление сил трения ремня, между шкивом двигателя и шкивом барабана
- отсутствие уязвимого коллекторно-щёточного узла, имеющего ограниченный ресурс и требующего обслуживания
К недостаткам двигателя BLDC относятся:
- достаточно сложная система управления ( по сравнению с коллекторным двигателем)
Справедливости ради, стоит отметить, что двигатель стиральной машины LG с прямым приводом не идеально бесшумный. В момент пуска двигателя, из-за взаимодействия магнитных полей статора с магнитами ротора, возникают колебания последнего, сопровождающиеся характерным металлическим звоном. По мере увеличения оборотов ротора, звук становится более мягким, но всё-равно своеобразным и характерным для всех стиральных машин LG с прямым приводом барабана.
При создании статьи, часть материалов заимствованна с сайтов: www.avislab.com и wikipedia
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Содержание
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
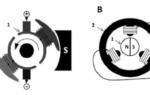
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работаетСоответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
 Руководство к швейной машине Подольск 142: как настроить и ремонтировать
Руководство к швейной машине Подольск 142: как настроить и ремонтироватьКак запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.

BLDC (Brushless Direct Current) — Бесщёточные электродвигатели постоянного тока, либо по другому, бесколлекторные электродвигатели постоянного тока.
Мотор относится к классу вентильных двигателей: бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспечивают 3 датчика Холла (для сенсорных контроллеров управления).
Применяются моторы в приводах электротранспорта: электромотоциклах, электроавтомобилях и т.п.
Питаются от источников постоянного тока 48В, 60В, 72В, 96В, 120В. Для работы требуется контроллер, соответствующей мощности.
 Моторы
Моторы Контроллеры
Контроллеры  УправлениеСравнение товаров (0)На странице:Сортировка:Электродвигатель BLT-800, 800Вт BLT-800 — бесколлекторный, бесщёточный электродвигатель постоянного тока (BLDC) 800 Вт Мотор относится к классу вентильных двигателей: бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспе.. 13 600 руб. USB кабель для программирования контроллеров серии HPC USB кабель для программирования контроллеров серии HPC Применение: Необходим для программирования синусных контроллеров серии HPC (HPC-300, HPC-500, HPC-700). Легко подключается к компьютеру через USB-порт. Программируемые параметры: — Рекуперативное торможение (Да/Нет), — Реверсн.. 5 400 руб.
УправлениеСравнение товаров (0)На странице:Сортировка:Электродвигатель BLT-800, 800Вт BLT-800 — бесколлекторный, бесщёточный электродвигатель постоянного тока (BLDC) 800 Вт Мотор относится к классу вентильных двигателей: бесконтактный двигатель постоянного тока с возбуждением от постоянных магнитов (неодим-железо-бор). Определение положения ротора в любой момент времени обеспе.. 13 600 руб. USB кабель для программирования контроллеров серии HPC USB кабель для программирования контроллеров серии HPC Применение: Необходим для программирования синусных контроллеров серии HPC (HPC-300, HPC-500, HPC-700). Легко подключается к компьютеру через USB-порт. Программируемые параметры: — Рекуперативное торможение (Да/Нет), — Реверсн.. 5 400 руб.

- https://www.a-qualux.ru/blog/tryokhfaznyy-beskollektornyy-dvigatel/
- https://www.asutpp.ru/chto-takoe-beskollektornyj-dvigatel-postoyannogo-toka-i-ego-princip-raboty.html
- https://goldenmotor.ru/bldc-motors/
 Устройство плавного пуска электродвигателя
Устройство плавного пуска электродвигателя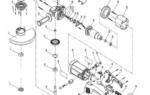 Как разобрать болгарку интерскол ушм 125 900
Как разобрать болгарку интерскол ушм 125 900 Контактор на ДИН рейку MC06120-25 V-220 вольт
Контактор на ДИН рейку MC06120-25 V-220 вольт