21 апреля 2019
Вы когда-нибудь задумывались, что делает дрон таким, каким он является сегодня? Не меньше десятка процессов! Квадрокоптеру требуется несколько компонентов для нормального функционирования, и контроллер полета является одним из наиболее важных в этом списке. Полетный контроллер квадрокоптера по существу является точкой контакта между устройством и пользователем. Любая информация, которую вы вводите в передатчик, будет передана в квадрокоптер с помощью контроллера полета.
По сути, контроллер полета — это не что иное, как электронная плата, которая управляет работой дрона. Если вы хотите, чтобы он двигался в определенном направлении, все, что вам нужно сделать, это включить элементы управления, и затем электронная плата аналогично будет управлять двигателями устройства. Это фактически нервная система квадрокоптера.
Кроме того, поскольку контроллер поставляется с большим количеством датчиков, они могут дать нам точную информацию о положении и другие сведения о квадрокоптере в воздухе. Работа дрона в значительной степени зависит от контроллера полета, поскольку он является компонентом, который обрабатывает все функции и элементы управления, контролирующие полет.
Сегодня мы поговорим о лучших полетных контроллерах со всеми их важными функциями.
Лучшие полетные контроллеры квадрокоптера на рынке
Контроллеры, которые используются с квадрокоптерами, так же важны, как качество и возможности самих квадрокоптеров. Без качественного контроллера полета для квадрокоптера все это практически бесполезно. Для этого также существуют приложения, но некоторые приложения просто не так хороши, как контроллеры.
Hobbypower KK2.15
-
Размер: 11,9 x 7.9 x 2 см
-
Вес: 8,6 г
-
Сигнал от приемника: 1520 мкСм (микросименсов)
-
Особенности: функция самообновления клиента, настраиваемый сигнал в двигатели, защита от неправильной полярности, повышенная стабильность благодаря обновлениям гироскопа 6050 MPU
-
Подходит для: тех, кто хочет обновить предыдущую версию
Hobbypower KK2.15 – это плата управления полетом следующего поколения, которая устанавливается в многороторные беспилотные летательные аппараты. Все, что вам нужно сделать, это установить плату в ваш дрон, выбрать тип дрона, проверить направление винтов и расположение двигателя, откалибровать ESC и радиосигнал, и все готово к работе.
Эта специальная плата была обновлена с первой версии для более чувствительной системы 6050 MPU и дополнительной функции автоматического выравнивания.
DJI NAZA-M V2
-
Размер: 12,7 x 9,4 x 78,7 см
-
Вес: 295 г
-
Совместимые приемники: PPM и S-Bus
-
Особенности: GPS, автоматическая компенсация отклонения от курса, алгоритм стабилизации высоты, IOC, идентификация и предупреждение об ошибках, расширенная калибровка IMU, RTL
-
Подходит для: пользователей гексакоптеров и октокоптеров
Контроллер полета DJI Naza M V2 — это обновленная версия модели Naza M, в которую были добавлены новые функции. Он имеет поддержку, специально разработанную для гексакоптеров и октокоптеров, чтобы обеспечить возможность безопасной посадки в случае неожиданного отказа двигателя.
Модернизированная версия включает в себя GPS, RTL и улучшенные возможности удержания позиции для усовершенствования летных характеристик. Автоматическая компенсация отклонения от курса также уменьшает влияние магнитных и общих помех.
 Обзор квадрокоптера Xiaomi Mi Drone
Обзор квадрокоптера Xiaomi Mi DroneNew Pixhawk PX4 2.4.6
-
Размер: 8,15 x 5 x 1,55 см
-
Вес: 499 г
-
Совместимый приемник: PPM
-
Специальные характеристики: внешний цветной светодиод, двойной полноугольный светодиод, система реального времени NuttX RTOX, автоматический и ручной режимы, Micro SD
-
Подходит для: дронов для аэрофотосъемки
Плата контроллера полета Pixhawk PX4 2.4.6 имеет 32-битную микросхему и интегрированную сенсорную технологию. Это позволяет избавиться от необходимости 8-битного APM или CPU. Она включает в себя внешний разноцветный светодиод и позволяет осуществлять альтернативное резервное управление.
Доступны как автоматический, так и ручной режимы, которые обеспечивают резервное переключение при сбое питания. Micro SD позволяет записывать изображения и является устройством хранения в целом.
LHI Pro Racing F3 Flight Controller
-
Размер: 36 x 36 x 30,5 мм
-
Вес: 5,67 г
-
Совместимые приемники: SBus, SumH, SumD, Spektrum1024 / 2048, XBus, PPM и PWM
-
Особенности: поддержка светодиодных лент RGB, автонастройка, настройка PID в полете, регистрация полетных данных в черном ящике, OneShot ESC, дополнительные контроллеры PID
-
Подходит для: гоночных мини FPV квадрокоптеров
Контроллер полета LHI Pro Racing F3 идеально подходит для мини-квадрокоптеров, которые предназначены для гонок и имеют функцию FPV. Он позволяет упростить будущие модернизации программного обеспечения, поддерживает подключение светодиодной ленты RGB, записывает данные о полетах в черный ящик и позволяет использовать несколько различных контроллеров полета.
Вы можете использовать CC3D, CJMCU и Sparky по своему выбору. Он поддерживает более 8 каналов RC, что делает его идеальным для гонок.
HobbyKing Race 32 Micro
-
Размер: 30 x 18 мм
-
Вес: 5 г
-
Совместимые приемники: SBus, SumH, SumD, Spektrum 1024/20148, XBus, PPM и PWM
-
Особенности: регистратор полетов Blackbox, встроенный инвертор, порт зуммера для контроля заряда батареи, защитный чехол, кроссплатформенный графический интерфейс
-
Подходит для: дронов с фиксированным крылом всех типов и квадрокоптеров, предназначенных для гонок
HobbyKing Race32 Micro разработан для предельного снижения веса, что очень важно для гоночных дронов. Он позволяет уменьшить вес и, как результат, увеличить скорость.
В ядре ARM-Cortex M4 используется аппаратное устройство с плавающей запятой, которое обеспечивает более эффективное время цикла и вычисления полета, которые стали в два раза быстрее по сравнению с платами STM2 F1 предыдущего поколения. Также имеется выход, предназначенный для программируемых светодиодов.
AbuseMark Naze32 Flight Controller
-
Размер: 15,24 x 10,16 x 1,02 см
-
Вес: 8,5 г
-
Совместимые приемники: PWM, PPM, Sum, Spektrum Satellite
-
Особенности: встроенный Micro USB, яркие светодиоды, система конфигурации на основе MultiWii, автономный стабилизатор камеры
-
Подходит для: дронов для аэрофотосъемки
AbuseMark Naze 32 Flight Controller имеет 3-осевой гироскоп MEMS и акселерометр, MPU6050, 3-осевой магнитометр HMC5883L. Он предусматривает полностью гибкие выходы двигателя и позволяет использовать несколько типов корпусов для квадрокоптеров, гексакоптеров, трикоптеров, бикоптеров, Y4 коптеров, октокоптеров и карданных подвесов в целом. Вы можете получить до 8 каналов RC через стандартные приемники.
Встроенная флэш-память SPI на 16 Мбит/с с Micro USB обеспечивает более простую настройку и полное конфигурирование. Программное обеспечение на базе MultiWii.
TAULABS SPARKY 2.0 Flight Controller
-
Размер: —
-
Вес: 59,5 г
-
Сигнал от приемника: RFM22b
-
Особенности: может быть подключен для лучшего соединения через RCVR, Flexi, 12C Auce, Main или USB, двойной аналоговый вход для мониторинга тока и общего напряжения, работает внешний магнитометр, OSD, GPS, поддержка FrySky Telemetry для Sensor Hub и/или S. Порт приемников, 3-х осевой гироскоп
-
Подходит для: высокоскоростных дронов, в том числе гоночных, но больше просто для быстрых дронов, независимо от того, предназначены они для гонок или нет. Также хорошо подходит для дронов, которые используют Waypoint, имеют более сложные сценарии, такие как кодирование PicoC, и тех, которые используются в основном для регистрации полета
Контроллер полета TauLabs Sparky 2.0 оснащен дополнительным мощным процессором, который был усовершенствован по сравнению с предыдущим поколением. Он работает на базе процессора STM32F4 на частоте 165 МГц, а также обладает увеличенным количеством флеш-памяти и оперативной памяти
 Квадрокоптер Syma X8HG с 8.0MP камерой HD
Квадрокоптер Syma X8HG с 8.0MP камерой HDОн включает полный набор датчиков, 3-осевой гироскоп и бесколлекторный внешний подвес, который помогает при необходимости отслеживания POI и управления от передатчика до самого подвеса.
OpenPilot CC3D Flight Controller
-
Размер: 8,6 x 5,8 x 2,3 см
-
Вес: 8,5 г
-
Совместимые приемники: PWM и PPM
-
Особенности: флэш-память 128 КБ, ОЗУ 20 КБ, высокопроизводительный гироскоп MEMs с 3 процессорами, высокопроизводительный акселерометр MEM с 3 осями, 4-слойная печатная плата, программное обеспечение поддерживается Linux, а также Windows и Mac, прямая высокоскоростная поддержка USB без драйвера, встроенная память EEPROM 4 Мбит/с для конфигурации хранилища, платы CC3D, CopterControl, могут быть сопряжены с мини-USB, жгут C
-
Подходит для: более сложных, изощренных дронов, которые требуют больше работы в отношении программного и аппаратного обеспечения
Плата OpenPilot CC3D Flight Controller имеет довольно обширный функционал. Вы можете даже взломать ее, чтобы получить бесплатное программное обеспечение, если вы не купили его. Установочные пакеты предоставляются. Жгут RC позволяет установить соединение с любым стандартным PWM приемником на ваш выбор.
Можно использовать подключение 12C, один последовательный порт, двойной последовательный порт или любой другой тип подключения на ваше усмотрение. Он поддерживает высокоскоростной USB без использования драйвера и поставляется с интегрированным программным обеспечением OpenPilot для простоты и удобства использования для пользователей всех возрастов.
Использование контроллера полета
Когда речь идет о полете квадрокоптера, пилот имеет абсолютный контроль. Однако управлять всеми четырьмя двигателями одновременно практически невозможно. Вот где появляется контроллер полета. Эта небольшая печатная плата способна направлять обороты каждого двигателя устройства в ответ на входной сигнал, поступающий в него.
Например, пилот просто подает команду контроллеру полета двигаться вперед. Затем это устройство начинает отрабатывать команду и определяет, как управлять двигателями для выполнения этой задачи.
Контроллер полета является важным компонентом всей установки, поскольку именно он дает пользователю возможность маневрировать устройством в соответствии с его желаниями. Но, если вы новичок, достаточно сложно представить, как выглядит и работает контроллер полета. Итак, давайте посмотрим подробнее, что на самом деле делают эти контроллеры.
Во-первых, контроллер полета получает сигналы от передатчика оператора. Это позволяет командам и инструкциям пользователя достигать квадрокоптера в воздухе. Контроллер полета также полезен для работы вместе с датчиками, которые размещены на борту для плавного полета. К ним относятся такие устройства, как акселерометр, гироскопы и тому подобное.
Контроллер выполняет еще одну функцию. Дрон – это мультикоптер, который поставляется с четырьмя различными двигателями. Каждый двигатель имеет определенную скорость. Таким образом, контроллер полета способен вычислять скорость каждого из четырех двигателей, затем он отправляет сигнал на электронные контроллеры скорости или ESC. Это обеспечивает более плавный полет.
Но есть кое-что действительно интересное в контроллерах полета. Каждая из упомянутых выше функций может многократно выполняться контроллером, что способствует эффективному полету. Устройства фактически оснащены несколькими датчиками, чтобы помочь им сделать расчеты скорости двигателя и тому подобное.
 Syma X5UW рестайлинговый квадрокоптер.
Syma X5UW рестайлинговый квадрокоптер. Датчики в контроллере полета
Различные контроллеры полета квадрокоптеров поставляются с различными датчиками. Ниже приведен список некоторых из наиболее распространенных датчиков, доступных с программируемыми контроллерами.
Акселерометр
Прежде всего, почти все контроллеры полета имеют акселерометр. По сути, это устройство, которое измеряет линейное ускорение коптера в 3-осевой системе. Этот датчик дает данные, которые позволяют пользователю составить представление о положении дрона.
Простой факт, что акселерометр способен обнаруживать гравитацию и реагировать на нее, означает, что он остается стабильным в воздухе, обеспечивая плавный полет. Правильный способ установки акселерометра на плате контроллера полета заключается в выравнивании линейной оси устройства с основной осью БПЛА.
Гироскоп
Так же, как акселерометр, гироскоп полезен для измерения скорости изменения угла. И опять же ее можно измерить по 3 осям. Однако вам нужно сделать некоторую итерацию, чтобы получить угол. Ось вращения датчика должна совпадать с осью БПЛА.
Инерционное измерительное устройство (IMU — англ. Inerta measurement unit)
Эта часть контроллера полета квадрокоптера состоит из гироскопа и акселерометра. Есть некоторые системы, которые сочетают в себе использование магнитометра и тому подобное.
Магнитометр
Как следует из названия, этот датчик представляет собой электронный компас, размещенный на плате контроллера. Это особенно необходимо для выравнивания направления беспилотника по сравнению с магнитным полем земли.
Барометр
Барометр, как известно, представляет собой прибор для измерения давления. Датчик давления на дроне может дать нам точное значение высоты устройства над уровнем моря. Наиболее точную информацию о высоте дает комбинация датчика давления и высоты GPS.
Датчик расстояния
Датчик расстояния встроен в самые современные контроллеры полета квадрокоптера. Он в основном выполняет функцию улучшения значения высоты, заданного датчиком давления или барометром.
Датчик расстояния может быть ультразвуковым, лазерным или лидарным.
Как выбрать лучший контроллер?
На рынке существуют различные типы контроллеров полета квадрокоптера, и, чтобы помочь вам выбрать лучший, ниже приведены некоторые особенности, которые вы могли бы учитывать.
Стиль полета
Прежде чем мы перейдем к покупке квадрокоптера и желанию управлять им, как профессиональному пилоту, необходимо понять, что существуют разные стили полета, и каждый контроллер полета обычно подходит для одного конкретного стиля.
Поэтому сначала нужно выбрать свой стиль полета. Вот несколько вариантов:
Кинематографический полет – это стиль полета направленный в первую очередь на получения плавных видео. Он также может использоваться для кинопроизводства. Для этого вам понадобится контроллер полета, который снижает летные свойства и замедляет скорость управления. Последнее означает, что вам придется медленно маневрировать, вместо резких движений.
Автономный полет – это еще один довольно важный стиль полета. Многие летчики, особенно начинающие, рассчитывают летать на квадрокоптере, не используя слишком много элементов управления. Для этого вам понадобится контроллер, способный выполнять максимальную работу, такую как автоматический взлет и автоматическая посадка.
Спортивный полет – самый захватывающий и авантюрный стиль полета из всех. К тому же он сильно отличается от двух других, так как здесь вам потребуется быстро менять стили полета, и вам придется выбирать между очень агрессивными и пассивными маневрами. Кроме того, если вы участвуете в гонках с другими пилотами, вам понадобится специальный контроллер. Устройство должно быть в состоянии двигаться с высокой скоростью крена и удерживать определенный угол. Вот почему контроллер полета спортивного квадрокоптера реально сложно использовать.
Контроллер полета c открытым исходным кодом
Это еще один аспект, который вы должны иметь в виду, прежде чем планировать покупку контроллера для себя. В плату с открытым исходным кодом у вас есть возможность внести изменения, добавить или удалить функции по желанию.
Цена
Сейчас на рынке имеются контроллеры полета для дронов в различных ценовых диапазонах и вы должны выбрать наиболее подходящий для вас. Для новичка лучше выбрать более дешевое устройство, так как оно может быть повреждено со временем. Если вы решите приобрести более дорогой контроллер, убедитесь, что его качество достаточно хорошее за эти деньги.
Вот несколько особенностей, которые нужно учитывать для хорошего управления полетом:
Стабилизация гироскопа – позволяет пилоту стабильно удерживать квадрокоптер в воздухе и хорошо контролировать.
Самовыравнивание – это довольно полезная функция, которая позволяет квадрокоптеру оставаться на одном уровне, не теряя высоту.
Режим ориентации – квадрокоптер, имеющий режим ориентации, дает пилоту возможность контролировать ориентацию дрона.
Удержание высоты – эта функция позволяет квадрокоптеру зависать и оставаться стабильным на определенном расстоянии от уровня земли, и пилоту не нужно постоянно регулировать дроссель.
Удержание позиции – подобно удержанию высоты, эта функция позволяет квадрокоптеру оставаться в фиксированной позиции или местоположении.
Возврат домой – это особая функция, присутствующая во многих дронах, которая позволяет устройству возвращаться в исходное положение взлета, даже когда пилот теряет контроль.
Навигация по маршрутным точкам – это еще одна захватывающая особенность коптера. Благодаря этому качеству устройство может следовать по нескольким точкам, отмеченным на карте как по плану полета.
GPS – эта функция в последнее время приобретает все большее значение. Она не только позволяет устройству сохранять свое положение, но и для удобства ведет учет данных полета.
Не знаете, какую модель купить?
Если вы все еще не решили, примите во внимание отзывы, упомянутые выше. Имейте в виду, что вся эта информация поступает от людей, которые уже протестировали эти контроллеры полета и довольны результатом. В целом, контроллеры полета важны для квадрокоптеров, чтобы обеспечивать безопасный и плавный полет. Тем не менее, у этих устройств есть плюсы и минусы и ниже перечислены некоторые из самых важных.
Плюсы:
-
Контроллеры полета оснащены несколькими датчиками, которые дают нам точную информацию о дроне, включая давление, высоту, направление и тому подобное.
-
Эти устройства передают инструкции и команды пользователя квадрокоптеру.
-
Контроллер также может помочь контролировать и управлять двигателями, чтобы достичь желаемой скорости для квадрокоптера.
Однако использование контроллера полета также имеет ряд недостатков.
Минусы:
-
Контроллер полета квадрокоптера — очень хрупкий объект, который может быть очень легко поврежден из-за ветра или случайных аварий. Таким образом, вы должны быть готовы к покупке запасных частей по мере необходимости.
-
Некоторые из датчиков должны быть защищены пеной, чтобы ветер не сломал их.
В заключение, контроллер полета, безусловно, является непобедимой и жизненно важной частью квадрокоптера. Следует соблюдать осторожность при выборе его в соответствии с вашими требованиями.
ОбзорыВсе обзорыОбзоры DJI Phantom 4 Pro или Mavic 2 Pro: скрытые преимущества и подводные камни Pro-моделей DJI
DJI Phantom 4 Pro или Mavic 2 Pro: скрытые преимущества и подводные камни Pro-моделей DJI
Количество полетных контроллеров, имеющихся в продаже может смутить новичка. Цель этой статьи — показать каким образом можно выбрать полетный контроллер для вашего коптера.
Оригинал: How to Choose Flight Controller for Quadcopter
Если вы только начинаете летать, тогда не забудьте прочесть руководство для начинающих пилотов гоночных коптеров.
Содержание
Полетный контроллер (ПК, flight controller, FC) — это мозг летательного аппарата. По сути, это схема, которая собирает данные с датчиков и команды от пользователя и делает некоторые изменения в скорости вращения моторов для того, чтобы коптер оставался в воздухе.
У всех ПК имеется базовый набор датчиков: гироскопы (Gyro) и акселерометры (acc); некоторые продвинутые конфигурации имеют также барометр и магнетометр (компас).
ПК — это также точка подключения всей прочей периферии типа GPS, светодиодов, сонаров и т.д.
Контроллеры для гоночных дронов очень быстро эволюционируют: становятся меньше, имеют всё более быстрые процессоры, более современные датчики и всё больше встроенных функций.
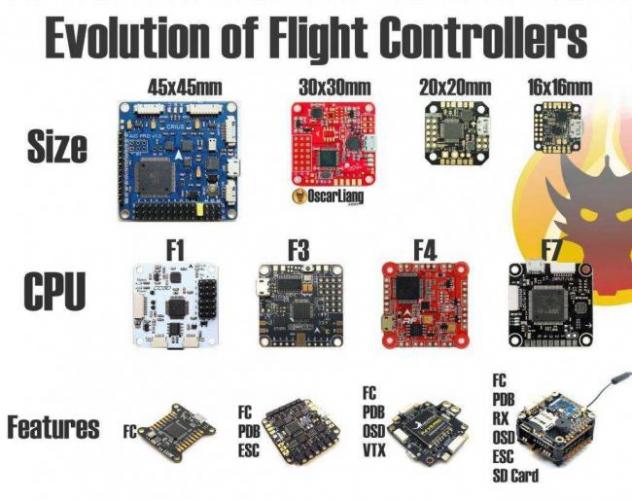
Эволюция полетных контроллеров
Помимо различий в железе, имеются различия и в прошивках, а также в программах для компьютера.
Вот список прошивок (и их описание) для миникоптеров. Если вы совсем в этом не разбираетесь, то мой вам совет, используйте Betaflight, Raceflight или KISS. У них отличные летные характеристики.
Современные прошивки для ПК можно настраивать используя специальные программы, установленные на компьютер или смартфон; или даже прямо с пульта управления.
«Тюнинг» — этот термин мы используем, когда меняем ПИД коэффициенты, рейты и некоторые другие настройки. При помощи тюнинга мы можем настроить коптер «под себя».
ПО для компьютеров имеет графический интерфейс, а набор доступных настроек отличается в зависимости от прошивки, так что есть некоторый входной уровень знаний при их использовании.

Самые популярные прошивки для полетных контроллеров
После того, как вы выберите прошивку ищите совместимый с ней полетный контроллер.
В настоящее время есть 4 основных типа процессоров: F1, F3, F4 и F7. Мы рекомендуем брать F3 или F4, т.к. прошивки уже уперлись в возможности F1 и дальше его нормально не поддерживают, а F7 — довольно новый, и требуется время для полной адаптации прошивок.
| F1 | F3 | F4 | F7 |
| 72 МГц | 72 МГц | 168 МГц | 216 МГц |
Подробнее про различия между сериями процессоров F1, F3, F4 и F7
Процессоры для ПК (слева направо): STM32 F1, F3, F4
UART расшифровывается как Universal Asynchronous Receiver/Transmitter, что означает асинхронный последовательный порт.
UART — это, как правило, аппаратный последовательный интерфейс, который позволит вам подключить разные внешние устройства к полетному контроллеру. Например, приемник, телеметрию, транспондер для гонок, управление видеопередатчиком и т.д.
У каждого последовательного порта два контакта: TX — для передачи, RX — для приема.
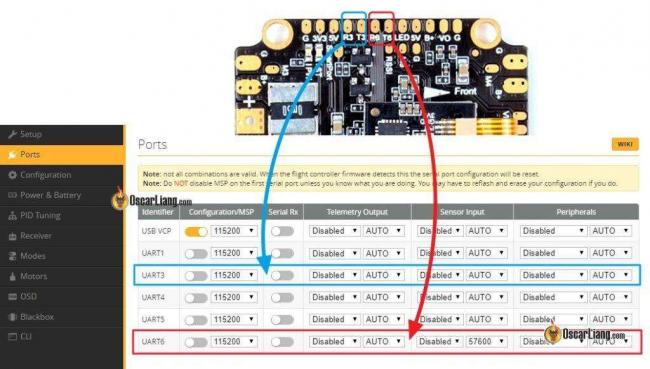
Пример: на полетнике есть UART3 и UART6. Вы можете назначить им задачи на вкладке Ports в Betaflight конфигураторе.
Количество последовательных портов в полетном контроллере
Возможно, вам потребуются (а может и нет) дополнительные последовательные порты, чем больше свободных есть, тем проще будет в будущем.
Количество портов зависит от дизайна платы и используемого процессора. Например, на ПК с F1 обычно только 2 порта, у F3 и F4 может быть от 3 до 5, а у F7 — семь или даже больше.
| F1 | F3 | F4 | F7 |
| 2 порта | 3-5 портов | 3-6 портов | 7 и более |
Инвертирование сигнала последовательного порта
Процессоры F3 и F7 могут инвертировать сигнал встроенным инвертором, а F1 и F4 — нет.
Сигналы Frsky SBUS и SmartPort являются инвертированными, поэтому владельцам ПК на F3 и F7 повезло, такие данные понимаются без проблем (F3 и F7 — более новые серии процессоров, подробнее тут).
Однако, более старые процессоры, типа F1 и F4 требуют наличия внешнего инвертора сигнала, который и подключается к соответствующему последовательному порту. Для удобства пользователей некоторые ПК на F4 уже имеют схемы для инверсии сигналов SBUS и SmartPort, так что приемник подключается напрямую к ПК. Если встроенного инвертора нет, то вам придется использовать одно обходных решений, например, программную эмуляцию последовательного порта (soft serial) или найти неинвертированный сигнал на приемнике.
Если портов не хватает, можно использовать программную эмуляцию (soft serial) чтобы создать ещё больше портов. К сожалению, эмулируемые порты работают медленнее аппаратных (нельзя выставить большую скорость) и не подходят для важных задач, где требуется быстрая реакция, например не подойдут для работы с приемниками. Ну и, конечно, программная эмуляция требует довольно много ресурсов процессора.
Цель датчиков на ПК определить ориентацию коптера и его движения. Микросхема с датчиками (IMU) содержит как гироскопы, так и акселерометры, но так как большинство FPV пилотов используют Acro Mode, то акселерометры обычно отключаются. Т.е. под IMU обычно подразумеваются только гироскопы (gyro).
Наиболее популярные гироскопы, используемые в полётниках:
| IMU | Способ подключения, шины | Макс. частота сэмплирования |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
* MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 с тем же магнитометром.
Выяснить тип можно взглянув на маркировку микросхемы, вот для примера популярный вариант Invensense MPU-6000.
Гироскопы и акселерометры на полетном контроллере
Выбор гироскопов: что лучше высокая частота опроса или шум?
У IMU есть две основные характеристики: максимальная частота семплирования и насколько полученные данные будут зашумлены (механическими вибрациями и электрическими помехами).
В настоящее время очень часто используют микросхему MPU6000, которая поддерживает частоту опроса до 8k, и обладает (неоднократно проверено) хорошей устойчивостью к разного рода шумам и помехам. Главное стараться избегать MPU6500 и MPU9250, хотя у них больше рабочая частота, но и уровень шумов тоже значительно выше.
Скорость работы гироскопов — это палка о двух концах: если питание чистое, и шумов нет, тогда серия ICM на 32k будет работать лучше, чем MPU6000. Однако, если регуляторы и моторы генерят довольно много помех, а коптер вибрирует, тогда ICM хуже, чем MPU6000.
Например, ICM20602 стоит на Raceflight Revolt V2, а ICM20689 на Kakute F4, оба работают на частоте 32k. Однако, в обзорах часто упоминают, что эти гиры более чувствительны к шумам, чем MPU6000, поэтому вышеупомянутые ПК лучше крепить с демпферами (антивибрационное крепление) и использовать конденсаторы для фильтрации помех по питанию, это поможет снизить шум.
В последнее время появляется всё больше и больше ПК с гироскопами на отдельной плате с антивибрационной развязкой (кусок поролона, чтобы снизить вибрации от моторов).
Антивибрационное крепление гироскопов на ПК Kakute F4
i2c или SPI?
i2c и SPI — это названия шин для подключения гироскопов к процессору. Выбранная шина может ограничить частоты опроса гироскопов и ограничит looptime.
Лучше всего использовать SPI, т.к. она позволяет работать с бОльшими частотами, чем i2c, у которой лимит в 4k.
Встроенные функции
OSD
OSD может показывать разную информацию на экране: напряжение аккумулятора, таймер и т.д. Те, кто знакомы с MinimOSD помнят сложность настройки, но если вам нравится эта функциональность, тогда выбирайте ПК с OSD.
Betaflight OSD настраивать значительно проще.
PDB
PDB или плата распределения питания — достаточно часто встречается в современных ПК, так что регуляторы скорости и основной LiPo аккумулятор подключаются напрямую к полётнику. Благодаря тому, что ПК и PDB это одна плата, а не две, мы экономим место в раме, упрощается разводка и пайка проводов. Недостаток такого решения — у некоторых ПК очень маленькие контактные площадки для пайки.
Датчик тока
Необходимость датчика тока не подлежит сомнению, потребляемый ток и съеденная емкость гораздо полезнее, чем просто напряжение аккумулятора, да и для тестов пригодится.
Подробнее про датчик тока и его калибровку (англ).
Регуляторы скорости
Встроенной PDB недостаточно? Есть ПК со встроенными регуляторами! Это значит, что моторы нужно подключать непосредственно к полетному контроллеру, что ещё больше упрощает сборку.
RacerStar Tattoo F4S FC — первый такой ПК в моих руках.
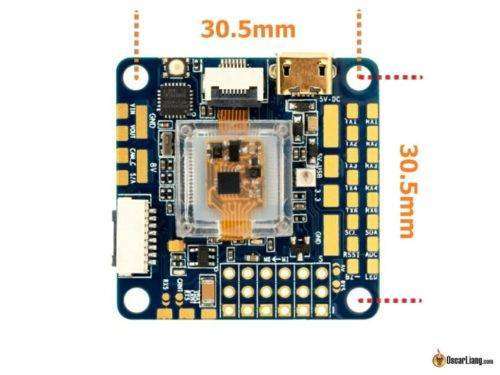
В данном случае подразумевается расстояние между крепежными отверстиями в плате полетного контроллера. Обычно это 30,5 х 30,5 мм, 20 х 20 мм или 16 х 16 мм. Формат крепежа определяет как размеры платы, так и размеры модели. В коптерах с 5″ пропами обычно используются ПК с крепежом 30,5 х 30,5, в более мелких коптераз — 20 х 20 мм. Формат 16 х 16 мм набирает популярность в классе коптеров с диагональю до 100 мм.
Blackbox (черный ящик): чип флэш-памяти или MicroSD карточка?
Данные черного ящика (англ.)
Есть два способа записать и сохранить данные черного ящика: на чип флэш-памяти установленный на плате ПК или на MicroSD карточку, вставленную в слот.
Чип памяти дешевле, но как правило он имеет небольшую емкость и хранит относительно немного данных, обычно 10-15, иногда 20 минут полетного времени (в зависимости от частоты запрашиваемых данных). Кроме того, загрузка данных с этого чипа идет довольно медленно, может уйти до 5 минут времени на загрузку лога длиной всего 1 минуту.
ПК со встроенным слотом для MicroSD карточек, позволяют хранить данные неделями, без необходимости очистки свободного места. Кроме того, чтение логов очень быстрое.
На мой взгляд выбирать нужно в зависимости от того, как часто вы планируете использовать черный ящик. Если хотите серьезно изучать полетные данные, тогда точно нужно брать ПК с MicroSD слотом.
Кстати, есть еще третий вариант — можно купить внешний логгер (Open Logger) со слотом для microSD и подключить его через свободный UART к ПК.
Типы разъемов
Три основных типа разъемов на полетных контроллерах:
- Пластиковые разъемы типа JST
- Контактные площадки («пятаки») для непосредственной пайки проводов
- Сквозные отверстия
Пластиковые разъемы менее надежны, но при этом позволяют быстро отключать/подключать кабели. Контактные площадки более крепкие, но есть риск их перегреть при пайке, и они отслоятся от платы. Наиболее универсальный вариант — сквозные отверстия: можно припаять провода или штыревые разъемы.
- Совет: как выпаять штыревые разъемы (англ)
- Совет: как восстановить отслоившиеся контактные площадки (англ)
BEC (стабилизатор напряжения)
В большинстве полётников уже есть стаб на 5 вольт. В некоторых есть и на 9, и 12 вольт (или на какое-нибудь другое напряжение).
Несмотря на то, что значительную часть FPV оборудования (камеры, видеопередатчики) можно подключать напрямую к литиевому аккумулятору, я считаю, что изображение будет лучше, если питать их через стабилизатор.
Подробнее про подключение FPV оборудования для минимизации помех (англ).
Кнопка boot (активация загрузчика)
Нажатая кнопка boot при подаче питания переводит процессор полетного контроллера в режим загрузчика (bootloader mode). В этом режиме можно обновить прошивку, даже если стандартные программы этого сделать не могут.
Подробнее про кнопку загрузчика (boot button)
У многих ПК есть два контакта которые нужно закорачивать для этой цели. Но гораздо приятнее, когда есть кнопка.
Слева кнопка загрузчика, справа — контакты для этой же цели
Прочие, полезные вещи, которые иногда встречаются в полетных контроллерах
- Встроенный видеопередатчик — главное преимущество: экономия места и веса, у некоторых видеопередатчиков можно менять настройки прямо через контроллер
- Барометр / магнитометр (компас) — это дополнительные датчики, которые совсем не обязательны для гонщиков
- Поддержка протоколов приемника — убедитесь, что ПК поддерживает протокол вашего приемника: PWM, PPM, SBUS, Spektrum Satellite и т.д.
- «Все-в-одном» — такой полетный контроллер состоит из одной платы, на которой есть всё необходимое: PDB, регуляторы, приемник и т.д. Недостаток — если что-то сгорит, то скорее всего придется менять плату целиком
- Поддержка инфракрасного транспондера — позволяет вам изменять время круга самостоятельно
Наиболее полный и актуальный список полетных контроллеров для миникоптеров можно найти тут: https://blog.rcdetails.info/polnyj-spisok-komplektuyushhih-dlya-fpv-mini-kopterov-250-razmer/#fc
Топ 5 лучших полетных контроллеров смотрите тут: https://blog.rcdetails.info/top-5-luchshih-poletnyh-kontrollerov-mart-2017/ (регулярно обновляется).
История изменений
- Декабрь 2014 — первая версия статьи
- Ноябрь 2016 — добавлена информация о прошивках, обновлен список фич в ПК
- Февраль 2017 — обновлена информация о процессорах и гироскопах
- Апрель 2017 — добавлена инфографика об эволюции полетных контроллеров, обновлен список процессоров
- Май 2018 — обновлена информация об интеграции функций в ПК
- Октябрь 2018 — добавлена информация о форматах крепежа
 Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Скорее всего, новичок растеряется в обилии контроллеров, потому что их очень много и каждый сделан обычно для конкретных задач. Например, контроллер для съемочного дрона заточен под максимальную стабилизацию, а вы хотите гоночный дрон, где это все не нужно.
Полетные контроллеры делятся на 3 группы:
- Гоночные полетные контроллеры
- Контроллеры для съемки видео и фото с дрона
- Контроллеры для автономных полетов
Каждый контроллер имеет свое программное обеспечение, которое управляет всем оборудованием. Самые популярные контроллеры можно прошивать и гибко настраивать с помощью специальных программ, таких как CleanFlight, Betaflight и Raceflight.
Ниже рассмотрим вопрос — какие бывают полетные контроллеры, а точнее, для каких целей.
 Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
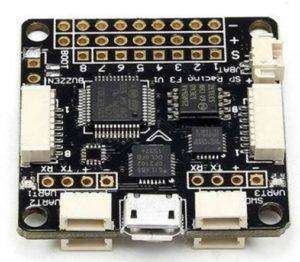
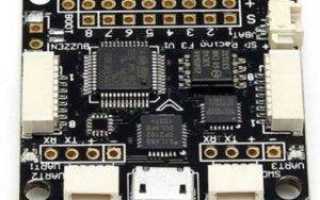
Naze32, также на базе этого контроллера есть SP Racing F3:
На нем присутствуют все стандартные датчики – гироскоп и акселерометр, а в расширенной версии DELUXE также есть барометр и компас.
Гироскоп и акселерометр определяют текущее расположение дрона в пространстве. Барометр определяет высоту по давлению (чтобы удерживать высоту, например), компас для удержания направления полета.
На сегодня, полетные контроллеры серии F4 являются самыми популярными полетными контроллерами для мини и гоночных квадрокоптеров, так как прекрасно работают с такими программами, как CleanFlight, Betaflight и Raceflight. На их смену уже выходит серия F7, становясь все более популярной.
Разработка прошивок для полетного контроллера F3 уже прекратилась из-за ограничения ресурсов, поэтому выбирайте для покупки F4 или F7:
Betaflight прекращает разработку ПО для полетных контроллеров F3 c STM32F3
Также еще два популярных контроллера:
KISS – прошивать своей прошивкой нельзя. Имеет графический интерфейс с минимумом настроек.
LUX – такой же гибкий, как Naze32, но все же уступает ему. Прошивать можно.
 Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Поддерживает весь набор датчиков (GPS, телеметрию, OSD и т.д.)
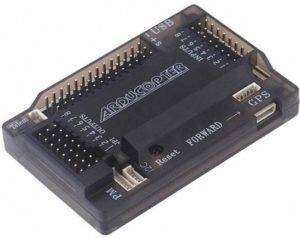
ArduPilot AMP поддерживает GPS и автономный полет по заданным координатам. Тоже достаточно популярный контроллер, но стоит дороже обычных из-за наличия более важных датчиков.
Vector Flight Controller- профессиональный полетный контроллер с встроенной системой Eagle Tree.
Новичок тоже сможет на таком летать. Эти контроллеры стоят дорого, а вес и размер стремятся к идеалу для аэросъемки.
3DR Pixhawk — самый популярный контроллер для автономных полетов. На его борту есть резервная система, а также он поддерживает все известные датчики для дронов.
MultiWii Pro — дешевый и доступный, позволяет отлично стабилизировать коптер, также на нем есть барометр, магнитометр и GPS.
Теперь, после краткого обзора типов полетных контроллеров, перейдем к полному описанию.
Полетные контроллеры отличаются не только по типу компонентов, из которых они состоят, но и по прошивкам, на которых они работают, то есть программным обеспечением, на котором работает полетный контроллер.
Как уже написано выше, на сегодня самыми популярными прошивками являются:
- CleanFlight;
- Betaflight;
- Raceflight.
Что из себя представляет программное обеспечение полетного контроллера — прошивка? Это набор правил и алгоритмов, которые обрабатывает процессор.
А теперь ответ на вопрос, как прошить полетный контроллер? Конкретно для каждой прошивки разработан свой конфигуратор — это специальная программа, которая загружает в полетный контроллер программное обеспечение, а зачем конфигуратор работает в роли графического интерфейса прошивки — чтобы вам было наглядно и удобно настраивать свой квадрокоптер.
Читайте также: Betaflight configurator, настройка на русском
С помощью графического интерфейса можно вносить различные настройки в прошивку, например, менять параметры PID, включать и редактировать фильтры, включать или отключать датчики, настраивать начальные и максимальные обороты двигателей и так далее. Но стоит отметить, что в зависимости от прошивки у них будет разный интерфейс, критичных отличий, конечно, не будет, но все же.
От процессора будет зависеть то, насколько быстро будут обрабатываться поступающие к нему данные. Процессоры делятся по поколениям: F1, F3, F4, F6. Вот такие странные поколения, где пропущены 2-е и 6-е поколения. Отличаются они частотой работы и архитектурой:
- F1 — 72MHz;
- F3 — 72MHz;
- F4 — 168MHz;
- F7 — 216MHz.
Сейчас все новые полетные контроллеры поставляются с процессором 7-го поколения, так как обрабатывать фильтры и PID становится все труднее, прогресс шагает километровыми шагами в этой сфере. Но у многих пилотов ПК на процессорах 3-го поколения, так как F3 был самым (да и остается) массовым поколением со стабильной работой.
Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные датчики, они определяют положение квадрокоптера в пространстве, а также движется ли он, посылают эти данные процессору, а тот уже решает, какому двигателю поддать газа, а какому наоборот, снизить обороты.
Акселерометр выполняет роль стабилизатора в пространстве, есть даже такой режим полета — «Режим стабилизации», при котором квадрокоптер невозможно будет перевернуть в воздухе и он всегда будет держаться параллельно земле (если просто отпустить стики на пульте). Опытные пилоты почти всегда летают в режиме АКРО, поэтому они отключают акселерометр или используют его крайне редко.
Гироскоп же выполняет роль определения положения квадрокоптера в пространстве.
Какие самые популярные гироскопы используются в полетных контроллерах? Смотрим таблицу ниже:
| Гироскоп | Протокол коммуникации (BUS) | Макс. частота работы гироскопа |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 и тоже с магнитометром.
Номер и название гироскопа можно найти на самом чипе, например это — MPU-6000:

Выбор гироскопа: частота опроса и шумы
Есть два критерия, которые нужно учитывать при выборе полетного контроллера с конкретным гироскопом, это частота работы и чувствительность к шумам (электро- и механическим).
На сегодня самыми популярными и надежными считаются гироскопы MPU6000, у них частота работы 8KHz, а также они достаточно не чувствительны к шумам. Советуем не покупать полетные контроллеры с гироскопами MPU6500 и MPU9250, у них хоть и частота выше, но они больше подвержены воздействию шумов.
Серия гироскопов ICM работает лучше и плавнее, чем MPU6000 на 32KHz, но из-за шумных двигателей и регуляторов оборотов производительность ICM будет ниже, чем MPU6000. Например, ICM20602 на Raceflight Revolt V2 или ICM20689 на Kakute F4, оба этих гироскопа могут работать на частоте 32KHz, но с регуляторами оборотов, которые генерируют много шума, они работать будут хуже, чем MPU6000. По этой причине на полетные контроллеры устанавливают сетевые фильтры для частичного удаления шумов.
Чтобы частично убрать механические шумы (вибрацию), полетный контроллер следует устанавливать на резиновые подушки или любой другой пористый материал, который сможет гасить вибрацию, например кусок резины или вспененного материала.

i2c и SPI
SPI и i2c — это протоколы связи (BUS) между процессором и гироскопом . В зависимости от того, какой будет протокол, будет зависеть скорость работы самого гироскопа. Гироскоп сможет работать на частоте 32KHz с протоколом SPI, в то время как на i2c можно рассчитывать на «потолок» в 4 KHz. Поэтому выбирайте ПК с SPI.
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:
Сколько бывает портов UART на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7+ UART |
Инвентированный сигнал и UART
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет. Также стоит отметить, что такой порт будет работать значительно медленнее, чем физический и он не подойдет для подключения приемника, например, так как такое замедление критично. Процессор тоже будет работать с повышенной нагрузкой.
Размеры платы полетного контроллера
Монтажная схема полетного контроллера — это расстояние между отверстиями для крепления ПК к раме дрона. В этом вопросе есть стандарт, который состоит из 3 схем:
- 30,5 × 30,5 мм,
- 20 × 20 мм,
- 16 × 16 мм.
Размер платы соответствует размеру дрона, который вы будете собирать, например, 30,5 х 30,5 мм устанавливаются в рамы размером от 200 мм и больше, а на меньшие рамы устанавливаются последующие размеры полетных контроллеров.
OSD
OSD — это очень важная и нужная функция. OSD накладывает на видеопоток дополнительную информацию с различных датчиков квадрокоптера, например, напряжение аккумулятора, высота, скорость и так далее. Любой, кто сталкивался с minimOSD, знает, какая трудность — подключить и настроить эту плату, да и мало подключить, ее еще нужно программатором прошить, и только после этого плату OSD можно будет настраивать в Betaflight.
Поэтому делайте выбор в пользу полетных контроллеров с встроенным OSD, это сбережет вам нервы и время.
Плата разводки питания (PDB)
К плате разводки питания подключаются аккумулятор и двигатели с регуляторами оборотов, а также полетный контроллер и прочая периферия. У некоторых ПК такая плата уже есть, они совмещены. Это, конечно, плюс, но где плюсы, там и минусы — в такой компоновке будет мало места, и в случае поломки ее будет сложнее устранять.
Читайте также: Что такое PDB? Для чего это нужно и как работает?
Датчик тока (Current Sensor)
На плате разводки обычно есть контакты VBAT, куда подключаются контакты полетного контроллера и ПК снимает данные о текущем напряжении, но свой собственный датчик тока эффективнее.
Регуляторы оборотов (ESC)
Наверняка вы уже слышали или видели регуляторы оборотов 4 в 1, такая квадратная плата вместо 4 плат. Инженеры решили интегрировать регуляторы сразу в полетный контроллер и теперь, если вы купите такой ПК, вам можно будет припаять двигатели напрямую к ПК. О целесообразности такого выбора решать только вам.
Читайте также: ESC регуляторы оборотов, что это, как они работают и как выбрать
Черный ящик (Blackbox)
Черный ящик нужен для записи логов работы квадрокоптера, туда записываются всевозможные данные, которые обрабатывает полетный контроллер. Есть два места, куда можно вести запись логов, это флеш-память полетного контроллера и SD-карта (флешка).
Плюсывстроенной флеш-памяти:
- Экономия места,
- Не нужен отдельный разъем.
Минусы встроенной флеш-памяти:
- Маленький размер хранилища,
- Маленькая скорость обмена данными (скачивание логов).
Плюсы SD-карты:
- Большой объем хранилища,
- Большая скорость обмена данными,
- Возможность подключить флешку к другому источнику считывания информации,
- В случае поломки легко заменить.
Минусы SD-карты:
- Объективных минусов не обнаружено.
Типы коннекторов
Это, конечно, не функция, но не рассказать об этом нельзя. На полетном контроллере есть 3 типа соединений между периферией:
- Пластиковые коннекторы
- Контактные площадки для припаивания
- Отверстия для припаивания
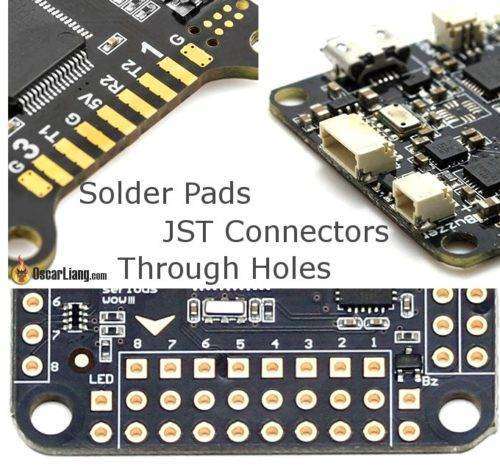
Пластиковые коннекторы в основном используются для подключения периферии, которую иногда нужно отключать и снимать, в этом их плюс — быстро снять/подключить. Они не очень прочные, но удобные.
Контактные площадки для припаивания удобны в использовании, но если контакт сильно нагреется во время использования, то есть вероятность, что он оторвется. То же самое и в вопросе о разрыве при сильном натяжении.
Отверстия для припаивания удобны тем, что провод гораздо прочнее будет «сидеть» в пазу. Также можно использовать угловые штифты для более удобного подключения периферии.
Регулятор напряжения (BEC)
На современных (да и не только) ПК есть отдельные контакты для подключения источника потребления на 5V и на 12V, иногда встречаются даже на 9. Хоть сейчас почти все FPV-компоненты рассчитаны на ток в широком диапазоне и их можно подключать даже к аккумулятору, мы все же рекомендуем подключать их к отдельному входу на полетном контроллере, где ток подается стабильным, тогда как в аккумуляторе он будет постоянно «скакать» от нагрузки.
Светодиод состояния
Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно у светодиода есть 2 цвета — красный и синий. В зависимости от того, каким и сколько раз мигает ПК — пилот понимает, все ли в порядке. Эта спецификация всегда указывается с конкретным контроллером.
Кнопка для перехода в режим прошивки
Без такой кнопки не обойтись ни одному полетному контроллеру. Для прошивки замыкают 2 контакта, затем подключают к компьютеру и запускают Betaflight конфигуратор или любой другой. Есть два типа:
- С кнопкой
- Без кнопки
С кнопкой удобнее — нажал отверткой и все, а вот для контактов нужно использовать пинцет или скрепку, чтобы закоротить их.
Что еще бывают функции в полетном контроллере?
- Встроенный видеопередатчик. Это экономия места и веса, а также возможность настраивать видео прямо из полетного контроллера.
- Барометр и Компас. Нужны для полета по курсу и зависания на одной высоте с определением этой высоты. Не нужны гоночным дронам.
- Поддерживаемый протокол связи полетный контроллер=приемник: при покупке обратите внимание, какие протоколы будет поддерживать ваш ПК — PWM, PPM, SBUS, Spektrum Satellite и другие. (Подробнее о протоколах: https://profpv.ru/протоколы-pwm-ppm-sbus-dsm2-dsmx-sumd-что-это-работае/)
- AIO. Означает, что * в 1, где * — любое число. Например, 6 в 1 — это 4 регулятора оборотов, сам полетный контроллер и плата разводки, и все это в одной плате. Единственный минус — если что-то сломается, скорее всего, придется менять всю плату.
- Поддержка инфракрасного транспондера. Нужен для гонок, чтобы засчитывать время круга, проходя контрольные точки.
Заключение
Как вы заметили, полетный контроллер — это очень важный узел в квадрокоптере и занимает очень много места в теории. И на вопрос, как правильно выбрать полетный контроллер, у вас не должно оставаться этих самых вопросов, а если остались, вы должны понять, для чего вам нужен квадрокоптер, для каких нужд. Если для гонок и драйва, то одни контроллеры, если для съемки, то другие. Также стоит учитывать ваши навыки, если вы новичок, то не стоит брать дорогие контроллеры с кучей датчиков или наоборот те, в которых абсолютно ничего не настроено и даже нет прошивки.
Также стоит учитывать бюджет, который вы можете потратить, так как цены очень сильно разнятся. Например, SP Racing F7 с OSD для гоночных дронов стоит от 1600 до 2500 рублей, а вот DJI A3 для профессиональной фото- и видеосъемки стоит 50 000 – 60 000 тысяч рублей.
Подведем итоги:
Выбирать полетный контроллер следует из ваших потребностей – для гонок, для съемки или для автономных полетов, а также, а также, на основе статьи, что написана выше.
Рекомендованный список новых полетных контроллеров, соответствующих современным требованиям
- Omnibus FC: — Aliexpress | Banggood
- Diatone MAMBA F405 c ESC — Aliexpress | Banggood
- Holybro Kakute F7 AIO — Aliexpress | Banggood
- Omninxt F7 airbot — Aliexpress | Banggood
- Hobbywing F4 4 в 1 (с регуляторами оборотов) — Aliexpress | Banggood
- Racerstar Star F4 c встроенными регуляторами оборотов — Aliexpress | Banggood
- DYS F4 PRO V — Aliexpress | Banggood
Читайте также: Полный справочник (FAQ) о гоночных квадрокоптерах: с чего начать и как летать
Используемые источники:
- https://drone1.ru/reviews/kontroller-poleta-v-serdce-kazdogo-drona.html
- https://blog.rcdetails.info/vybiraem-poletnye-kontroller-dlya-kvadrokoptera/
- https://profpv.ru/poletnyj-kontroller/
 Какой квадракоптер выбарть? Обзор Walkera Runner 250 в 2019
Какой квадракоптер выбарть? Обзор Walkera Runner 250 в 2019 Отзыв: Контроллер заряда Li-Ion аккумуляторов Kvsun TP4056 - Отличный контроллер для цепей заряда АКБ типа 18650.
Отзыв: Контроллер заряда Li-Ion аккумуляторов Kvsun TP4056 - Отличный контроллер для цепей заряда АКБ типа 18650. Радиоуправляемый квадрокоптер Syma X5C - отзывы
Радиоуправляемый квадрокоптер Syma X5C - отзывы Обзор квадрокоптера Cheerson CX 10W
Обзор квадрокоптера Cheerson CX 10W