Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
 Обзор JJRC H37 ELFIE - недорогой селфи-дрон, клон знаменитого DOBBY
Обзор JJRC H37 ELFIE - недорогой селфи-дрон, клон знаменитого DOBBYИнструкция по сборке квадрокоптера своими руками (для начинающих)
А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы
Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы
Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник
Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея
Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.
 Обзор модельного ряда квадрокоптеров от Syma: самые удачные модели дронов
Обзор модельного ряда квадрокоптеров от Syma: самые удачные модели дроновХочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.
Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
 Квадрокоптер Syma X8C. Прекрасный бюджетный вариант
Квадрокоптер Syma X8C. Прекрасный бюджетный вариантЕсть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
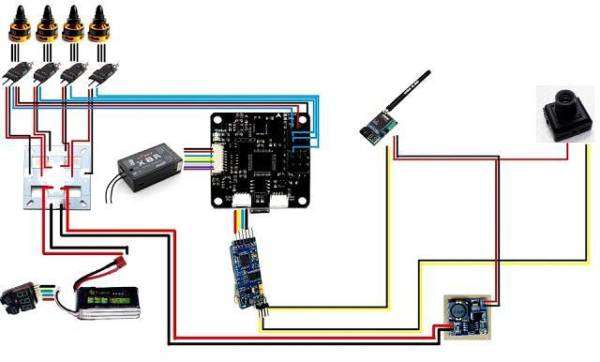
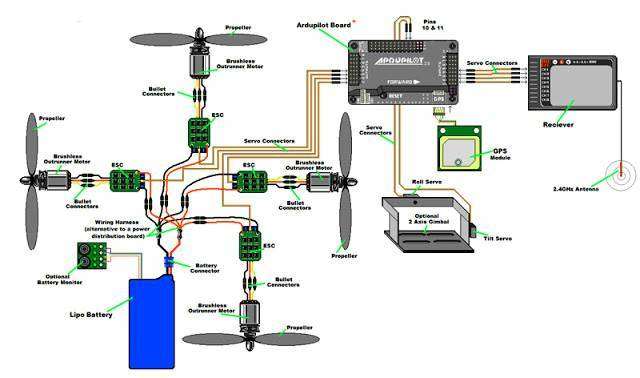
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.
Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка
- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка
- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
Наверное, не стоит лишний раз говорить о том, насколько популярны сейчас квадрокоптеры. И вы, скорее всего, знаете, сколько они стоят, и уже забросили думать об этом. В нашей статье вы узнаете, как сделать квадрокоптер своими руками в домашних условиях. Сразу предупреждаем, что дело это ответственное и непростое, но по итогу у вас будет бесценный опыт и заветный девайс по смешной цене.
Есть несколько способов собрать квадрокоптер своими силами:
- Комплект «Всё включено». Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
- Комплект «Almost Ready to Fly». «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
- Сделать квадрокоптер самим. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
- Использовать подручные материалы. Не менее сложно, но реально. Детали с aliexpress, подручная электроника — никто не говорил, что будет легко. С другой стороны, всё нужное, включая схемы и чертежи, легко находится в интернете.
Как собрать квадрокоптер своими руками
Предупреждаем, что инструкция обобщена и что могут быть различия в паре моментов. Мы расскажем основное по поводу сборки и выбора деталей.
Какие нужны детали
- Рама и её составляющие. Главное в коптере – несущая часть. Если рама будет легче, то меньше будет уходить питания. Но учтите — лёгкие рамы стоят дороже. Прочность не так важна, если вы не планируете ставить на коптер камеру потяжелее. Рамы бывают трёх типов: четырёхлучевые, шестилучевые и восьмилучевые (по одному мотору на каждый луч).
Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные
- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.
- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.
- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.
- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).
Аналоги камеры GoPro
Экшн-камера Xiaomi Yi
Цена на AliExpress: US $49.99 — 109.99
Технические характеристики:
- Сенсор: CMOS 1/2,3″ 16 мегапикселей;
- Объектив: f/2.8, угол обзора 155 градусов;
- Видео: 1920×1080, 60fps;
- Фото: 4608×3456;
- Вес: 72 грамма;
- Time Lapse: есть;
- Встроенный экран: нет;
- Память: карта памяти microSD.
SJCAM SJ5000X 2K
Цена на AliExpress: $126.58
Технические характеристики:
- Сенсор: CMOS 12 мегапикселей;
- Объектив: f/2.8, угол обзора 170 градусов;
- Видео: 2560×1440, 30fps;
- Фото: 4032×3024;
- Вес: 74 грамма;
- Time Lapse: есть;
- Встроенный экран: есть;
- Память: карта памяти microSD.
О деталях из Китая
Конечно, не стоит недооценивать китайских производителей, но и расхваливать тоже не нужно. Завышенная характеристика их товаров – обычное дело. Брать можно, но только не дешёвые детали, иначе придётся делать всё заново.
Инструкция по сборке
Наверняка, вы прочитали эту статью и взяли раму с платой распределения. Но если вы это не сделали – не беда, просто подключите провода к модулю управления.
Возьмём, к примеру, коптер, собранный из таких комплектующих:
- Основа (каркас) – Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450
- 4 мотора DYS D2822-14 1450KV Brushless Motor.
- Регулятор оборотов DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления 1.5 kk21evo
- АКБ, тип: литий-полимер — Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Зарядное устройство Hobby King Variable6S 50W 5A
- Аккумуляторный коннектор XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5мм Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления Spektrum DX6 V2 with AR610 Receiver (с приёмником и передатчиком)
Всё это обойдётся где-то в 20 тысяч рублей
Этапы сборки квадрокоптера
Раскладываем всё это добро по столу и приступаем.
- Приблизительно прикидываем нужную длину проводов контроллера, добавляем небольшой запас на всякий случай, и обрезаем их до необходимой длины.
- Коннекторы припаиваем к выходам регуляторов для упрощения подключения моторов.
- Припаиваем регуляторы оборотов к плате разводки.
- Припаиваем коннектор АКБ тоже к плате разводки.
- Аккуратно прикручиваем моторы на лучи дрона. При установке бережём резьбу.
- Припаиваем коннекторы двигателей, если их нет.
- Прикручиваем лучи с моторами к плате.
- Крепим регуляторы к лучам коптера. Удобней всего это делать пластмассовыми хомутами.
- Включаем провода регуляторов к движкам в случайном порядке. Если понадобится, потом изменим порядок.
- Закрепляем на корпусе модуль управления (предварительно сфотографировав тыльную сторону, потом поймёте, для чего). Крепим хоть на жвачку, но рекомендую для начала применить мягкую двухстороннюю липкую ленту.
- Подключаем регуляторы оборотов к контроллеру. В порты, отмеченные знаками «плюс»-«минус»-«пусто», как правило, подключаем белым проводом к экрану.
- Оставшейся липкой лентой закрепляем приёмник поближе к блоку управления, и подключаем необходимые каналы к соответствующим портам. Применяем документацию данного приёмника и снимок внешнего края платы, дабы понять, какая стопка проводов за что отвечает.
- Подключаем питание прибора от батареи, сквозь коннектор.
- Вы молодец! Вы собрали свой первый дрон.
Теперь вам осталось его настроить, чтобы он не разбился в первый день полёта.
- Запускаем моторы (здесь по-всякому бывает, штудируйте документацию)
- Добавляем газ и смотрим, в какую сторону крутятся пропеллеры. Они обязаны вертеться так, как написано в схеме, что прилагается к контроллеру. По-другому управление станет инвертироваться. В случае, если что-нибудь пошло не так — переворачиваем коннектор, объединяющий движок и контроллер.
- Если всё вертится верно – прикручиваем верхнюю часть рамы. Не старайтесь втолкать её на место. В случае, если та встала туго — что-то идёт не так. Ослабляем нижние винтики, впоследствии установки затягиваем всё постепенно.
- Закрепляем блок с батареями.
- Монтируем адаптеры для пропеллеров на двигатели.
- Ставим пропеллеры, беря во внимание сторону вращения моторов. Приподнятый элемент лопасти обязан глядеть в сторону вращения.
- Есть! Ваш квадрокоптер готов к первому полёту.
Мы с вами рассмотрели простой пример сборки квадрокоптера, который не требует больших затрат и усилий в плане сборки. Соответственно, если вы решите поднимать на дроне что-нибудь потяжелее (навигатор, более тяжёлые средства съёмки и т.п.) – конструкцию придётся доработать и усилить. Тем не менее, вы уже получили первый опыт сборки подобных конструкций. Дальше вам будет проще понимать принцип работы коптера и знать, как его в дальнейшем доработать.
cthutqМоделирование / АвиацияВсем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел показать довольно интересную самоделку, а именно самодельный квадрокоптер. Если вам нравиться авиамоделизм, но собрать самолёт пока для вас довольно сложно, то можно начать с квадрокоптера. В данной статье будет подробно описано, как собрать свой собственный самодельный квадрокоптер. Данная сборка будет, состоять из самых дешёвых комплектующих купленных в китайских магазинах. Конечно, данный микро квадрокоптер не будет хвастаться своими лётными качествами, и ещё какими либо параметрами. Но это вам поможет освоить правильное расположение массы на летающем аппарате и основные настройки, и основные функции квадрокоптера. Ну да ладно, хватит длинных предисловий, погнали! И так, для данной самоделки нам понадобится:— электродвигатели 4 шт. (2шт CW и 2 шт. CCW продаются комплектом из 4шт.)- подходящие винты для электродвигателей 4 шт.- аккумулятор подходящего размера 3.7V.- кабель зарядки для аккумулятора.- плата управления.- аппаратура для платы управления.- лист ABS пластика (можно использовать коробку от DVD диска).- провода.- терма усадка.Из инструментов нам также понадобится:— паяльник.- канцелярский нож.- дрель.- сверла.- линейка.- маркер.- двойной скотч.- терма клей.- супер клей.Вначале нам следует изготовить раму, на которой и будет собираться квадрокоптер. Для изготовления рамы нам следует взять лист пластика, лучше всего подойдёт ABS пластик, так как он очень легкий, что для микро квадрокоптера очень хорошо. Но если такого пластика у вас нет, то отлично подойдет коробка от DVD диска или пищевой контейнер.Разобравшись с пластиком для рамы, на самом пластике делаем похожие метки, примерно, такие как изображены на фото ниже. Так же следует обратить внимание на отмеченные точки, в этих местах будут установлены электродвигатели, а это значит то, что они должны быть, отмечены максимально точно и симметрично.Следующий наш шаг это высверливание отверстий под крепление электродвигателей. Это очень важный этап, так как от этого будет зависеть управляемость и общее поведение квадрокоптера. Для высверливания лучше использовать ступенчатое сверло, им будет очень удобно сделать чёткий контур. Но если у вас такого нет, то просто нужно взять сверло подходящего диаметра, то есть диаметр сверла должен совпадать с диаметром электродвигателя.После чего нам нужно вырезать саму раму. Вырезать мы будем, используя канцелярский нож. Советую делать это с использованием линейки, приложив линейку, сильно надавливая, проводим ножом и отламываем, сгибая пластик. Старайтесь сделать максимально аккуратно.Перейдем к установке электродвигателей. Это не совсем просто как могло показаться, так как в купленном китайском наборе иметься 2 двигателя формата CW и 2 двигателя CW. Но сначала увеличиваем длину проводов на электродвигателях, так как их длины нам просто будет не достаточно. Припаиваем отрезки проводов 3-4см и изолируем терма усадкой.На изображение снизу показано как следует устанавливать электродвигатели. Стрелка на изображение указывает на переднюю часть квадрокоптера. И устанавливаем электродвигатели согласно изображению.Следующий шаг это установка винтов на валы электродвигателей. Тут тоже не все так просто. Если внимательно присмотреться к винту, то на нём можно разглядеть надпись «B1» или «A2». Что означает винт с номиналом «B1» следует устанавливать на электродвигатель с номиналом CW, а винт «A2» на электродвигатель CCW.Затем возьмём плату управления квадрокоптером и отпаяем от неё все разъёмы для электродвигателей.Плату управления следует приклеить к раме квадрокоптера строго, так как это указанно на фото ниже. А устанавливать эту плату следует при помощи терма клея, конечно лучше будет плату прикрутить при помощи винтов, но винтики куда тяжелее, чем пара капель терма клея.Контакты от электродвигателей припаиваем к плате управления точно так же, как это изображено на фото ниже. Далее вырежем из того же пластика, подходящую по размеру трапецию. Таких заготовок нам понадобиться 2 шт. Они будут выполнять роль, как ножек, так и защиты квадрокоптера.Вырезанные трапеции следует приклеить в указанные места. Клеить лучше всего на супер клей. Наносим супер клей на трапецию, ждём около одной минуты, прикладываем к раме и ждем схватывания клея.После чего следует закрепить аккумулятор на корпусе, крепить будем при помощи двойного скотча.Вставляем разъём от аккумулятора к плате управления, и если загорается синий светодиод, то все в норме.После включения платы управления следует включить аппаратуру. Пошевелив стиками, аппаратура соединиться с платой управления, и синий светодиод перестанет моргать.Следует задуматься о зарядке аккумулятора нашего микро квадрокоптера. Для этого возьмём уже готовый USB провод с модулем зарядки. Но так как разъёмы не подошли, автор самоделки просто перепаял разъёмы. Все готово! Теперь остаётся настроить обороты каждого двигателя и наслаждаться полётом. Также следует добавить, что чтобы завести электродвигатели следует, свести стики к центру и двигатели начнут вращаться на минимальных оборотах. В итоге у нас получился весёлый квадрокоптер, с которым будет интересно играть, как ребенку, так и взрослому человеку, поскольку он умеет выполнять перевороты и довольно шустро летать.Вот видео от автора с подробной сборкой и испытаниями данной самоделки:Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики.  Доставка новых самоделок на почту
Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь. Используемые источники:
- https://drongeek.ru/profi/kvadrokopter-svoimi-rukami
- https://kiborg.pro/dron/kvadrokopter-svoimi-rukami/
- https://usamodelkina.ru/11310-kak-sdelat-mikro-kvadrokopter-svoimi-rukami.html
 Обзор квадрокоптера cheerson cx 20
Обзор квадрокоптера cheerson cx 20 Мини квадрокоптер — обзор лучших моделей разной ценовой категории
Мини квадрокоптер — обзор лучших моделей разной ценовой категории Syma x15w — функциональная модель с FPV-камерой для начинающих пилотов
Syma x15w — функциональная модель с FPV-камерой для начинающих пилотов Обзор MJX Bugs 6: готовый к полётам гоночный дрон от известного производителя на 250 раме
Обзор MJX Bugs 6: готовый к полётам гоночный дрон от известного производителя на 250 раме