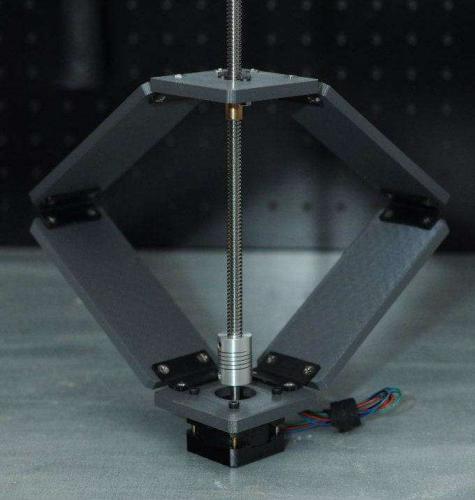
Цены на компоненты направляющих могут варьироваться от десятков до тысяч долларов в зависимости от их размера и точности. Один из способов обойти высокую стоимость этих компонентов — заменить их механизмом, который преобразует вращательное движение в прямолинейное. Механизм Саррюса, изобретенный в 1853 году Пьером Фредериком Саррюсом, как раз является одним из таких механизмов, которые могут обеспечить идеально ровное линейное движение, и для которых не нужны какие-либо справочные руководства.
В этом проекте для создания недорогого механизма Саррюса используются простые пластины, напечатанные на 3Д принтере или вырезанные лазером, а также пластиковые «живые» петли. Затем, чтобы заставить их двигаться, к ним добавляется шаговый двигатель NEMA 17 и резьбовой стержень. Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Шаг 1: Материалы и приспособления
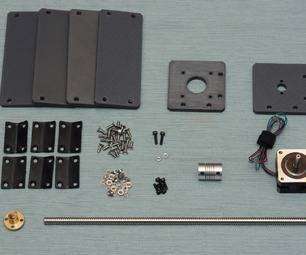

Материалы:
- Связующая пластина (4 штуки, напечатанные на 3Д-принтере или вырезанные лазером в Шаге 2)
- Пластина двигателя (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластина привода (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластиковые петли (6 штук, куплены мной в McMaster-Carr, парт-номер 1637A713)
- Винты с плоской головкой, резьба 6-32 x 9,5 мм длиной (24 штуки)
- Пресс-гайка, резьба 6-32 (1 упаковка из 25 штук, куплены мной в McMaster-Carr, парт-номер 94674A515)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 12 мм длиной (2 штуки)
- Шестигранные гайки, M3x0.5 (2 штуки)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 10 мм длиной (4 штуки)
- Муфта вала, 5 х 8 мм (1 штука)
- Шаговый мотор NEMA 17 с монтажными отверстиями с резьбой M3x0.5 (1 штука)
- Гайка Акме M8 (1 штука)
- Стержень с резьбой Акме M8, 300 мм длиной (1 штука)
Инструмент:
- Набор шестигранных ключей
- Отвертка
- Плоскогубцы
Шаг 2: Печатаем или вырезаем связующие
Используя прикреплённые файлы, напечатайте на 3Д-принтере, либо вырежьте на лазерном резчике следующие части:
- Связующая пластина (4 штуки)
- Пластина двигателя (1 штука)
- Пластина привода (1 штука)
Свои части я напечатал серым пластиком ABS. Если вы вырежете части лазером, то толщина их должна составить около 6.35 мм. В качестве материала подойдёт дерево, акрил, МДФ или любой другой схожий материал.
Я прикрепляю файлы формата STEP для тех из вас, кто хочет внести в проект свои изменения. Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
Файлы
Шаг 3: Вставляем пресс-шайбы



Вставьте шайбы в связующие, пластину двигателя и привода. Обратите внимание на ориентацию пластин двигателя и привода.
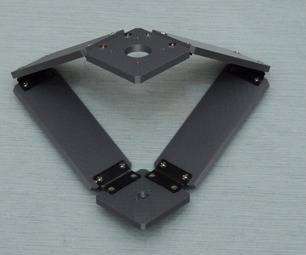
Шаг 4: Установите на связующие пластины петли





Установите петли согласно фотографиям и прочно закрепите их четырьмя винтами с плоской головкой. Не сорвите резьбу слишком большим давлением.
 Петли TRX: польза, эффективность, упражнения + ответы на самые популярные вопросы по TRX
Петли TRX: польза, эффективность, упражнения + ответы на самые популярные вопросы по TRXПовторите процедуру и соедините петлёй две оставшиеся связующие пластины. У вас должно получиться два набора соединённых пластин.
Шаг 5: Установите петли на двигатель


Расположите пластину двигателя и два набора связующих как показано на фото. Установите две петли при помощи восьми винтов с плоской головкой.
Шаг 6: Установите петли привода

Расположите пластину привода и связующие пластины как показано на фото. Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
Шаг 7: Устанавливаем гайку Акме


Вставьте два винта с выемкой под шестигранник M3 x 12 мм сквозь связующее привода, как показано на картинке. Опустите на них гайку Акме. Закрутите две шестигранных гайки M3 поверх винтов. Переверните пластину привода. Затяните винты, удерживая гайки плоскогубцами и поворачивая винты подходящим шестигранным ключом.
Шаг 8: Прикрепите шаговый двигатель


На связующее двигателя при помощи четырёх винтов с выемкой под шестигранник M3 x 10 прикрепите шаговый двигатель.
Шаг 9: Прикрепляем муфту вала
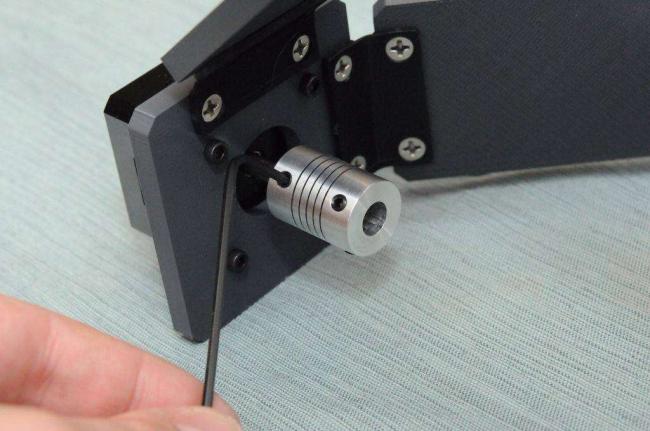
Оденьте на вал двигателя 5-миллиметровую муфту вала, затяните винты шестигранным ключом.
Шаг 10: Установите стержень с резьбой Акме
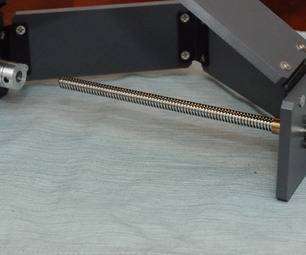

Вкрутите стержень в гайку Акме примерно наполовину. Согните механизм Саррюса таким образом, чтобы вы смогли продеть стержень с резьбой в муфту вала. Затяните винты на муфте вала подходящим шестигранным ключом.
Шаг 11: Запустите механизм
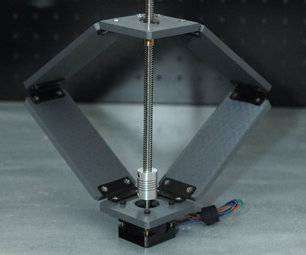
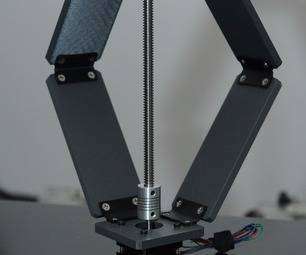

Сборка линейного электропривода своими руками подошла к концу! Теперь осталось лишь подключить шаговый двигатель к контроллеру, и механизм придёт в движение.
Линейные привода предназначены для приведения в движение частей машин и механизмов по линейному поступательному движению. Привода преобразуют электрическую, гидравлическую энергию или энергию сжатого газа в движение или силу. В этой статье представлен анализ линейных приводов, их преимуществ и недостатков.
 Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому.
Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому.Как работают линейные привода
- По принципу работы линейные привода можно разделить на:
- электрические;
- пневматические;
- гидравлические.
Линейные электрические привода преобразуют электрическую энергию в механическую. В качестве двигателя в них используется либо вращающийся либо линейный электрический двигатель. Вращающийся электрический двигатель перемещает шток посредством механического преобразователя, например с помощью шарико-винтовой или ролико-винтовой пары.
Пневматические и гидравлические привода фактически являются механическими преобразователями и представляют собой своего рода вставку (пневматическую или гидравлическую) между двигателем и исполнительным органом.
Пневматические линейные привода имеют поршень внутри полого цилиндра. Давление от внешнего компрессора или ручного насоса перемещает поршень внутри цилиндра. При увеличении давления поршень перемещается по оси, создавая линейную силу. Поршень возвращается в свое начальное положение посредством пружины или сжатого газа подаваемого с другой стороны поршня.
Гидравлические линейные привода работают подобно пневматическим приводам, но практически несжимаемая жидкость подаваемая насосом лучше перемещает шток, чем сжатый воздух.
Электрические привода
Преимущества
Электрические привода обладают высокой точностью позиционирования. Для примера точность может достигать 8 мкм с повторяемостью не хуже 1 мкм [1]. Настройки привода масштабируемы для любых целей и требующихся усилий.
Электрические привода могут быть быстро подключены к системе. Диагностическая информация доступна в режиме реального времени.
Обеспечивается полное управление параметрами движения. Могут включать энкодеры для контроля скорости, положения, момента и приложенных сил.
Электрические привода тише гидравлических и пневматических.
В связи с отсутствием жидкостей отсутствует риск загрязнения окружающей среды.
 Как прошить Xbox 360 и зачем это нужно? – Пошаговая инструкция
Как прошить Xbox 360 и зачем это нужно? – Пошаговая инструкцияНедостатки
Начальная стоимость электрических приводов выше чем пневматических и гидравлических.
В отличие от пневматических приводов электрические привода (без дополнительных средств) не подходят для применения во взрывоопасных местах.
При продолжительной работе электродвигатель может перегреваться, увеличивая износ редуктора. Электродвигатель может также иметь большие размеры, что может привести к трудностям установки.
Сила электропривода, допустимые осевые нагрузки и скоростные параметры электропривода определяются выбранным электродвигателем. При изменении заданных параметров необходимо менять электродвигатель.
 Линейный электропривод, включающий вращающийся электродвигатель и механический преобразователь
Линейный электропривод, включающий вращающийся электродвигатель и механический преобразователь
Пневматические привода
Преимущества
Простота и экономичность. Большинство пневматических алюминиевых приводов имеют максимальное давление до 1 МПа с рабочим диаметром цилиндра от 12,5 до 200 мм, что приблизительно соответствует силе в 133 — 33000 Н. Стальные пневматические привода обычно имеют максимальное давление до 1,7 МПа с рабочим диаметром цилиндра от 12,5 до 350 мм и создают силу от 220 до 171000 Н [1].
Пневматические привода позволяют точно управлять перемещением обеспечивая точность в пределах 2,5 мм и повторяемость в пределах 0,25 мм.
Пневматические привода могут применяться в районах с экстремальными температурами. Стандартный диапазон температур от -40 до 120 ˚C. В плане безопасности использование воздуха в пневматических приводах избавляет от необходимости использования опасных материалов. Данные привода удовлетворяют требованиям взрывозащищенности и безопасности, так как они не создают магнитного поля, в связи с отсутствием электродвигателя.
В последние годы в области пневматики достигнуты успехи в миниатюризации, материалах и интеграции с электроникой. Стоимость пневматических приводов низкая в сравнении с другими приводами. Пневматические привода имеют маленький вес, требуют минимального обслуживания и имеют надежные компоненты.
Недостатки
Потеря давления и сжимаемость воздуха делает пневматические привода менее эффективными, чем другие способы создания линейного перемещения. Ограничения компрессора и системы подачи значит, что работа на низком давлении приведет к маленьким силам и скоростям. Компрессор должен работать все время даже если привода ничего не перемещают.
Для действительно эффективной работы пневматические привода должны иметь определенные размеры для каждой задачи. Из-за этого они не могут использоваться для других задач. Точное управление и эффективность требуют распределители и вентили соответствующего размера для каждого случая, что увеличивает стоимость и сложность.
Несмотря на то, что воздух легко доступен, он может быть загрязнен маслом или смазкой, что приводит к простою и необходимости в обслуживание.
Цилиндр пневматического привода
Гидравлические привода
Преимущества
Гидравлические привода подходят для задач требующих большие силы. Они могут создавать силу в 25 раз больше чем пневматические привода того же размера. Они работают при давлениях до 27 МПа.
Гидравлические двигатели имеют высокий показатель мощность на объем.
Гидравлические привода могут держать силу и момент постоянным без подачи насосом дополнительной жидкости или давления, так как жидкости в отличии от газа практически не сжимаются.
Гидравлические привода могут располагаться на значительном расстоянии от насосов и двигателей с минимальной потерей мощности.
Недостатки
Подобно пневматическим приводам потеря жидкости в гидравлических приводах приводит к меньшей эффективности. Помимо этого утечка жидкости приводит к загрязнениям и потенциальным повреждениям рядом расположенных компонентов.
Гидравлические привода требуют много сопровождающих компонентов, включающих резервуар для жидкости, двигатели, насосы, стравливающий клапан, теплообменник и др. В связи с чем такие привода сложно разместить.
Цилиндр гидравлического привода
Библиографический список
machinedesign.com — What’s the Difference Between Pneumatic, Hydraulic, and Electrical Actuators?</li></ul>DmitrijПриспособления






















 Доставка новых самоделок на почту
Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь. Используемые источники:
- https://masterclub.online/topic/14793-lineinyi-aktuator
- https://engineering-solutions.ru/motorcontrol/actuator_linear/
- https://usamodelkina.ru/17476-linejnyj-privod-svoimi-rukami.html

 TRX тренировки. Польза и противопоказания. TRX петли и особенности
TRX тренировки. Польза и противопоказания. TRX петли и особенности Гайкорезы и гайколомы
Гайкорезы и гайколомы Устройство плавного пуска электродвигателя
Устройство плавного пуска электродвигателя Самый сложный выбор, с которым сталкивается каждый владелец Xbox 360
Самый сложный выбор, с которым сталкивается каждый владелец Xbox 360