Когда у автолюбителей возникают те или иные проблемы с двигателем, они начинают интересоваться, какой датчик отвечает за обороты двигателя, поскольку первое подозрение зачастую падает на данные устройства.
Однако это не всегда так, ведь обороты могут «плавать» по различным причинам. Лучше всего для начала убедиться в том, что какие-либо другие поломки отсутствуют, а измерители проверять после. Так или иначе, если вы хотите обнаружить нужный датчик, вам необходимо знать, как он выглядит, и где его искать.
Основные понятия
Чтобы синхронизировать работу систем зажигания, а также впрыска, предусматривается датчик оборотов, или, как его называют, измеритель частоты вращения. Именно он передаёт в электроблок, управляющий мотором, необходимые данные о том, какие вращения поддерживает коленчатый вал в данный момент.
Этот измеритель силового агрегата – важнейший элемент автомобиля, без которого не обходится взаимодействие многих систем, ведь он помогает обеспечивать корректное функционирование всей машины в целом.

Электронный управляющий блок авто обрабатывает особые сигналы, которые посылает этот измеритель, чтобы выяснить:
- количество впрыскиваемого топлива в данный момент;
- момент впрыска;
- время, требуемое для активации клапана адсорбера;
- момент зажигания (у бензиновых моторов);
- угол поворачивания распределительного вала во время работы системы по изменению фаз механизма газораспределения.
Чтобы определить работоспособность измерителя, необходимо узнать его местонахождение.
Место расположения
Датчик частоты вращения, или индукционный измеритель, обычно располагается над маркерным диском автомобиля.
Диск, в свою очередь, может находиться:
- на маховике;
- на коленвале внутри блока цилиндров – такое бывает у марок Ford, Opel и т.д.;
- спереди моторного отсека на коленвале, вместе со шкивом привода допагрегатов (Jaguar, BMW, ВАЗ и т.д.).
Лучше всего, когда маркерные зубцы маховика предназначаются лишь для измерения оборотов мотора. Чуть хуже, если маркерными являются стартерные зубцы: эта особенность присутствует у автомашин марок Audi и Volvo.

 Регуляторы оборотов для болгарки в Санкт-Петербурге
Регуляторы оборотов для болгарки в Санкт-ПетербургеНебольшая кривизна зубца маховика или маленький скол, присутствующий на нём, часто могут стать причиной в нарушении работы системы зажигания, из-за чего силовой агрегат не может функционировать на повышенных частотах вращения. В этом случае зачастую происходит хаотичное искрообразование, так как блок управления неправильно определяет количество зубцов.
Важные особенности
Следует обратить внимание, что на некоторых автомобилях датчик частоты вращения заменяет измеритель Холла: данное приспособление может передавать в главный блок управления не только сигнал о фазах механизма газораспределения, но и обороты двигателя. Если у вас именно такая ситуация, то найти прибор можно вблизи распределительного вала.
В случае, когда измеритель частоты вращения коленчатого вала выйдет из строя, вы не сможете завести свой автомобиль: после доскональной проверки системы зажигания и подачи топлива, в ходе которой не будет обнаружено существенных отклонений, рекомендуется обязательно проверить работоспособность датчика оборотов.

Заключение
«Плавающие» вращения двигателя не так редки: это состояние может возникнуть вследствие нескольких причин, поэтому необходимо тщательно проверить все варианты.
Если в работоспособности всех важнейших систем автомашины у вас сомнений не возникнет, рекомендуется задаться вопросом, какой из датчиков отвечает за обороты двигателя. Чтобы обнаружить причину быстро и более точно, рекомендуется своевременно провести диагностику авто, но не стоит забывать, что в некоторых случаях можно обойтись и без неё.
Полезное видео:
Датчики скорости и частоты вращения измеряют количество оборотов или расстояние, пройденное за определенное время. Применительно к автомобилестроению в обоих случаях — это измеряемые переменные, возникающие между двумя компонентами или относительно поверхности дороги либо другого автомобиля. Однако иногда необходимо измерить абсолютную скорость вращения в пространстве, т.е. вокруг осей автомобиля (скорость вращения вокруг вертикальной оси). Например, для системы динамической стабилизации (ESP) скорость вращения автомобиля вокруг вертикальной оси должна вычисляться путем «считывания». Вот о том, какими бываю датчики скорости и частоты вращения, мы и поговорим в этой статье.
Содержание
В инкрементном определении относительной скорости вращения вокруг вертикальной оси, в зависимости от количества и размера сканируемых периферийных меток ротора, различают следующие типы датчиков (рис. «Регистрация относительной частоты вращения» ):
- Простой датчик оборотов, только с одной сканируемой меткой на оборот, что позволяет определить только среднюю скорость вращения;
- Сегментный датчик, лишь с небольшим количеством сканируемых периферийных сегментов (например, эквивалентных количеству цилиндров двигателя);
- Инкрементный датчик с близко расположенными периферийными метками.
Что измеряют датчики скорости и частоты вращения
До определенного момента эта форма датчика позволяет измерять мгновенную скорость в точках на окружности и, соответственно, регистрировать очень мелкие угловые доли.
 Как сделать диагностику автомобиля через ноутбук самостоятельно
Как сделать диагностику автомобиля через ноутбук самостоятельноПримерами относительной частоты вращения являются частота вращения коленчатого или распределительного вала двигателя, частота вращения кулачкового вала топливного насоса высокого давления дизеля, частота вращения колес автомобиля (ABS, TCS, ESP). Измерения в основном выполняются с помощью системы инкрементных датчиков, состоящей из шестерни и датчика частоты вращения.
Формы датчиков скорости
Используются различные формы датчиков (рис. «Различные формы датчиков» ): стержневые, вильчатые и кольцевые (внутренние и внешние). Благодаря простоте монтажа, самым распространенной формой датчика является стержневая. Стержневой датчик размещается рядом с ротором, зубья которого приближаются к нему и проходят в непосредственной близости. Однако датчики такой формы имеют самую низкую чувствительность измерений. В некоторых случаях допускается использование вильчатых датчиков, нечувствительных к осевому и радиальному люфту. В установленном состоянии этот датчик должен быть примерно совмещен с ротором. Тип датчика, в котором датчик окружает вал ротора в форме кольца, уже практически не используется.
Требования к новым датчикам скорости
Во многих отношениях более ранние традиционные датчики индуктивного типа показывают очень неудовлетворительные результаты. Они выдают амплитуду, зависимую от частоты вращения, и поэтому непригодны для низких оборотов, допускают лишь относительно небольшие допуски воздушного зазора, и большей частью неспособны отличить колебания зазора от импульсов частоты вращения. По крайней мере, конец датчика- из-за своей близости к тормозу (в случае с датчиками скорости вращения колес), должен быть стойким к высоким температурам. Эти недостатки находятся позади дополнительных функций, на которые нацелено новое поколение датчиков:
- Статическое определение (т.е. при нулевой скорости: сверхмалые обороты коленчатого вала или частота вращения колес);
- Эффективное измерение в больших зазорах (не совмещенный монтаж с зазорами> 0);
- Небольшой размер;
- Эффективная работа независимо от колебаний зазора;
- Термостойкость до 200 °С;
- Определение направления (опция для системы навигации);
- Определение опорной метки (зажигание).
Магнитостатические датчики (датчики Холла, магниторезисторы, AMR) очень хорошо отвечают первым двум требованиям. И, как правило, они также обеспечивают соответствие второму и третьему требованиям.
На рис. «Схема расположения датчиков, нечувствительных к колебаниям воздушного зазора» показаны три, в принципе, приемлемые формы датчиков, обычно нечувствительные к колебаниям зазора. Здесь следует различать датчики с радиальным и тангенциальным считыванием. Это означает, что, независимо от зазора, магнитостатические датчики всегда смогут отличить северный и южный полюса магнитноактивного полюсного колеса или роторного кольца. В случае с магнитнопассивными роторами знак выходного сигнала уже не будет зависеть от зазора при регистрации напряженности тангенциального поля (хотя тот факт, что зазор часто увеличивается из-за ротора, является здесь недостатком). Однако часто используются также радиально измеряющие градиентные датчики, которые по сути лишь регистрируют градиент радиального поля, изменяющий свой знак не при изменении зазора, а только при изменении угла поворота.
Роторы
Ротор имеет ключевое значение для измерения скорости вращения; однако он обычно поставляется автопроизводителем, в то время как сам датчик приходит от поставщика. До недавних пор почти исключительно использовались магнитнопассивные роторы, состоящие из магнитомягкого материала, обычно железа. Они дешевле магнитотвердых полюсных колес и проще в обращении, поскольку не намагничиваются, и нет опасности взаимного намагничивания (например, во время хранения). Как правило, при одинаковых инкрементной ширине и выходном сигнале, внутренний магнетизм полюсного колеса (полюсное колесо определяется как магнитноактивный ротор) допускает значительно больший зазор.
Современные датчики скорости
Гоадиентные датчики
Содержат постоянный магнит, полюс которого обращен к зубчатому колесу. Его поверхность гомогенезирована тонкой ферромагнитной пластиной, на которой расположены два гальваномагнитных элемента на расстоянии примерно половины зубчатого интервала. Таким образом, один из элементов всегда находится напротив межзубного промежутка, а другой — напротив зуба. Измеряется различие в напряженности поля в двух смежных местоположениях на окружности. Выходной сигнал приблизительно пропорционален отклонению силы поля как функции угла на окружности, поэтому полярность не зависит от зазора.
Тангенциальные датчики
Тангенциальные датчики отличаются от их аналогов градиентного типа способом получения вариаций в полярности и напряженности магнитного поля, в компонентах, расположенных касательно к окружности ротора. Варианты конструкции включают тонкопленочную технологию AMR (вытянутые резисторы с поперечными полосками) или резисторы из одного сплава, по полу- или полной мостовой схеме. В отличие от градиентных датчиков, их не требуется адаптировать к конкретному шагу зубьев ротора, и они могут выполнять считывание в данной точке. Требуется локальное усиление, хотя их измерительный эффект на 1-2 порядка выше, чем у кремниевых датчиков Холла (рис. «Датчик оборотов AMR в виде датчика тангенциального поля» ).
При использовании интегрированного в подшипник датчика частоты вращения коленчатого вала, на общей рамке с выводами устанавливаются тонкопленочный анизотропный магниторезистивный датчик (AMR-датчик) и монолитная интегральная схема, производящая вычисления. С целью экономии пространства и защиты от влияния температуры, интегральная схема устанавливается под углом 90°.
 Датчик температуры охлаждающей жидкости: работы по замене ДТОЖ
Датчик температуры охлаждающей жидкости: работы по замене ДТОЖКолебательные гирометры
Позволяют измерять абсолютную частоту вращения при поворотах автомобиля (отклонения вертикальной оси). В частности, это требуется в системах контроля динамики автомобиля VDC, стабилизации заноса и навигации. Принцип действия базируется на свойствах механических гироскопов; при измерении используется ускорение Кориолиса, сопутствующее колебательному движению:
aCoriolis= ax = 2·vу · ΩZ
Скорость vy изменяется синусоидально, в соответствии с колебательным движением:
vу =v’у·sinω·t
При постоянной скорости вращения вокруг вертикальной оси Ωz создается синусоидальное ускорение Кориолиса с такими же частотой, положением и фазовым углом, а значение амплитуды будет следующим:
a’Coriolis = 2 v’у · Ωz
Это ускорение можно измерить блоком наблюдения, также движущимся на материальной точке т (рис. «Создание ускорения Кореолиса» ). Чтобы определить скорость вращения вокруг вертикальной оси, используется подходящий орган управления для эффективного поддержания амплитуды колебаний на постоянном уровне и выпрямления ускорения Кориолиса, измеренного на колеблющейся массе т с выбором фазы и частоты (например, с помощью синхронизирующего усилителя). В этом процессе удаляется нежелательное ускорение извне, например, ускорение кузова.
Микромеханические кремниевые датчики скорости вращения автомобиля вокруг вертикальной оси обеспечивают недорогую и компактную альтернативу использующимся в настоящее время прецизионным пьезоэлектрическим датчикам. Объединение технологий позволяет достигать высокой точности, необходимой для динамических систем автомобиля (рис. «Микромеханический датчик скорости вращения вокруг вертикальной оси ММ1 с электродинамическим приводом» ). Две толстые пастированные пластины, изготовленные из платы посредством объемной микромеханики колеблются в двухтактном режиме на своей резонансной частоте, которая определяется их массой и жесткостью сцепляющей пружины (> 2 кГц). Каждая плата снабжена располагаемым на поверхности микромеханическим емкостным датчиком ускорения, который служит для измерения ускорения Кориолиса (поворотного ускорения) Ωz в плоскости кристаллической пластины, расположенной перпендикулярно к направлению колебаний, когда кристалл датчика поворачивается вокруг своей вертикальной оси с угловой скоростью. Получаемые сигналы пропорциональны произведению угловой скорости и скорости возвратно-поступательного движения, которая регулируется электроникой до установления постоянной величины. На колеблющейся плате имеется изготовленный печатным способом простой проводник, на который действуют силы Лоренца в поле постоянного магнита, направленном перпендикулярно поверхности кристалла. Таким образом, проводник используется для измерения частоты колебаний как напрямую, так и индуктивным способом при том же магнитном поле. Различные физические характеристики приводных и сенсорных систем предупреждают недопустимые перекрестные помехи. Для того чтобы исключить внешнее ускорение (сигнал общего режима), два противоположных сигнала датчика вычитаются один из другого (суммирование используется для определения внешнего ускорения). Точная микромеханическая структура помогает подавить эффект большого колебательного ускорения, которое на несколько порядков выше ускорения Кориолиса нижнего уровня (поперечная чувствительность значительно ниже 40 дБ). Приводные и измерительные системы в понятиях механического и электрического действий являются строго изолированными.
Если кремниевый датчик скорости вращения вокруг вертикальной оси изготавливать в полном соответствии с поверхностной микромеханикой (SMM), а магнитный привод и систему управления заменить электростатической системой, это изолирование может быть реализовано менее последовательно: установленный по центру роторный генератор, работающий по законам электростатики, служит для получения колебаний с амплитудой, которая постоянно регулируется емкостным измерительным преобразователем (рис. Датчик вращения во круг вертикальной оси SMM ММ2 (поверхностная микромеханика) с элетростатическим приводом» ). В случае, когда Ω≠0, силы Кориолиса инициируют одновременное наклонное движение «вне плоскости» с амплитудой, пропорциональной скорости вращения вокруг вертикальной оси и определяемой емкостным способом — электродами, расположенными под генератором. Для того чтобы это движение не слишком амортизировалось, датчик должен работать в вакууме. Хотя меньший размер кристалла и более простой процесс его изготовления и уменьшают стоимость такого датчика, миниатюризация приводит к ухудшению точности измерения. Это предъявляет более высокие требования к электронике. Влияние внешних ускорений здесь уже устраняется механически. Это второе поколение датчиков скорости вращения вокруг оси обозначается аббревиатурой ММ2 и используется главным образом в системах защиты пассажиров для определения скорости вращения вокруг продольной оси (бокового раскачивания).
Дальнейшие разработки в области систем стабилизации автомобилей предъявляют все более высокие требования к качеству и мощности сигнала. Они требуют дополнительных осей измерения с высокой надежностью. Третье поколение датчиков (ММ3) отвечает этим требованиям. В этих датчиках используется новое поколение микромеханических элементов. Они измеряют угловые скорости вращения и ускорения, а измеряемые переменные подвергаются цифровой обработке.
В следующей статье я расскажу о датчиках ускорения и вибрации.
Применения
Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
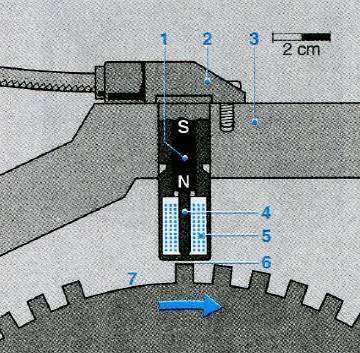
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
Конструкция и принцип действия Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнитомягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита. Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя. Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
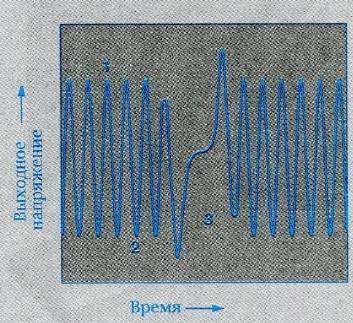
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
- Зуб
- Впадина
- Опорный сигнал
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
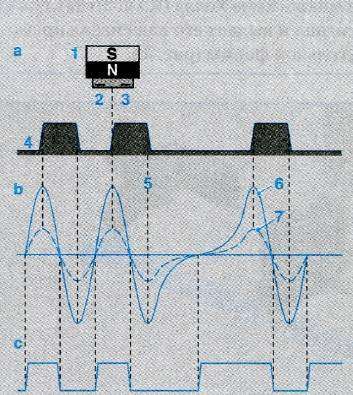
Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Датчик Холла 1
- Датчик Холла 2
- Зубчатое колесо
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
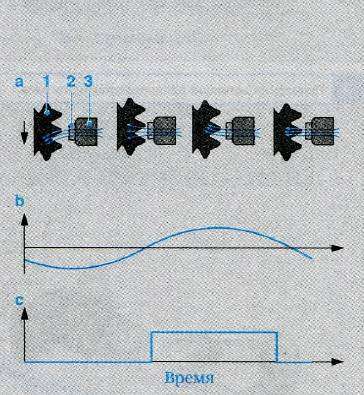
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
Используемые источники:
- http://avtotehnar.ru/datchik-oborotov-dvigatelya-avto/
- http://press.ocenin.ru/datchiki-skorosti-i-chastoty-vrascheniya/
- https://ustroistvo-avtomobilya.ru/diagnostirovanie/datchiki-chastoty-vrashheniya-dvigatelya/

 Датчик кислорода:назначение,виды,устройство,фото,принцип работы
Датчик кислорода:назначение,виды,устройство,фото,принцип работы Датчик температуры охлаждающей жидкости: признаки неисправности, проверка и ремонт
Датчик температуры охлаждающей жидкости: признаки неисправности, проверка и ремонт Что такое лямбда-зонд или кислородный датчик
Что такое лямбда-зонд или кислородный датчик Датчик температуры охлаждающей жидкости двигателя: как он работает, проблемы, симптомы, проверка
Датчик температуры охлаждающей жидкости двигателя: как он работает, проблемы, симптомы, проверка