Я думаю, в рунете по крайней мере, это первый более-менее осмысленное сравнение версий автопилота PХ4/PIXHAWK, особенно учитывая его малую распостранненость на наших просторах. Многие знают и использовали APM, сам лично коммитил несколько hardware changes в него, но он уже все, не рекомендован к использованию в новом дизайне. Устарел морально и технически. Последний релиз автопилота будет 3.2, после чего в новых версиях APM перестанет быть поддерживаемым. Итак, начнем. Для правильного понимания — стоит знать что все это ветки(форки) PX4, в том или ином виде модернизированного в соответствии с новыми реалиями и пожеланиями аппаратных разработчиков, на текущий момент есть 4 основых работающих аппаратных ветки:PX4: Оригинал, собственно всех последующих веток. Это первый глобальный редизайн и смена вычислительной платформы, после 16битного APM. На мой взгляд — САМЫЙ удачный коснтруктив в плане ввода-вывода. Со своей стороны прикладываю сейчас массу усилий стандартизировать ввод-вывод на pixhawk fire, но разработчики усиленно сопротивляются, т.к. не хотят консолидировать все вокруг одного унитарного коннектора требующего брейкаута. Но, вернемся к PX4. Актуальная аппратная ревизия: 1.7.1 Используется схема «2 гироскопа», для уменьшения погрешностей и увеличения вибрационной стойкости системы.Технические характеристики: Процессор: STM32F405 (Cortex M4F), 168МГц Память: ОЗУ/ПЗУ: 192KB RAM / 1024 KB Flash Сенсоры: MPU-6000, L3GD20, HMC5883L, MS5611 Преимущества: + очень удобная платформа, работает под стандартным NUTTX, с слоями FMU адрукоптера. + Есть в готовом формфакторе готовая плата специально под замену в AR.Drone (что превращает в общем-то игрушку в нормальный БПЛА) Недостатки: — требует «стекирования» ввода-вывода плат — Нежный преобразователь питания Для PX4 в наличии достаточно много допплат, но, для использования PX4 требуется в обязательном порядке две платы — PX4FMU и PX4IO(ну на самом деле можно без IO обойтись, но это ОЧЕНЬ трудоемко, проще стеком IO модуль воткнуть). Важно — в текущей версии APM нет работающей реализации Optical Flow, поэтому на OF модуль можно забить. Полностью поддерживается, но, в силу не самого удобного использования — лично я не стал-бы брать PX4, а брал-бы PixhawkPIXHAWK:
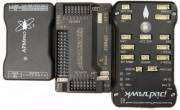
Оригинал, собственно всех последующих веток. Это первый глобальный редизайн и смена вычислительной платформы, после 16битного APM. На мой взгляд — САМЫЙ удачный коснтруктив в плане ввода-вывода. Со своей стороны прикладываю сейчас массу усилий стандартизировать ввод-вывод на pixhawk fire, но разработчики усиленно сопротивляются, т.к. не хотят консолидировать все вокруг одного унитарного коннектора требующего брейкаута. Но, вернемся к PX4. Актуальная аппратная ревизия: 1.7.1 Используется схема «2 гироскопа», для уменьшения погрешностей и увеличения вибрационной стойкости системы.Технические характеристики: Процессор: STM32F405 (Cortex M4F), 168МГц Память: ОЗУ/ПЗУ: 192KB RAM / 1024 KB Flash Сенсоры: MPU-6000, L3GD20, HMC5883L, MS5611 Преимущества: + очень удобная платформа, работает под стандартным NUTTX, с слоями FMU адрукоптера. + Есть в готовом формфакторе готовая плата специально под замену в AR.Drone (что превращает в общем-то игрушку в нормальный БПЛА) Недостатки: — требует «стекирования» ввода-вывода плат — Нежный преобразователь питания Для PX4 в наличии достаточно много допплат, но, для использования PX4 требуется в обязательном порядке две платы — PX4FMU и PX4IO(ну на самом деле можно без IO обойтись, но это ОЧЕНЬ трудоемко, проще стеком IO модуль воткнуть). Важно — в текущей версии APM нет работающей реализации Optical Flow, поэтому на OF модуль можно забить. Полностью поддерживается, но, в силу не самого удобного использования — лично я не стал-бы брать PX4, а брал-бы PixhawkPIXHAWK: Собственно основная текущая аппаратная платформа APM’а. Де факто — практически то-же самое что и PX4, просто чуть обновленнее, и в намного более удобном конструктиве. Конструктив автоматически решает все проблемы с барометром, конструктив кейса решает вопросы с пылью и прочей нечестью на самой плате, т.к. достаточно неплохо ее защищает. Реально смотря на вещи — это ПЕРВЫЙ рабочий продукт, которым реально пользоваться практически сразу, все остальные так или иначе — полуинженерные «образцы», даже не смотря на популярность(например АРМ2.5 мегапопулярен, но конструктив откровенно неудачный). У «орла» есть свои проблемы — отвратительные коннекторы, и реально проблемная беда с монтажем. Дизайнер проектировавший корпус очень плохо подумал о том как его будут крепить не на самоклейки. Лично я пришел к использованию оного БЕЗ корпуса, но рекомендовать не буду. У меня и плата покрыта защитным лаком, и прочие методы защиты электроники выполнены, естественно с отдельной защитой барометра.Технические характеристики: Процессор: STM32F427 (Cortex M4F), 168МГц (Основной) <complete>+ </complete>STM32F103 (Фейлсейф) Память: ОЗУ/ПЗУ: 256KB RAM / 2048 KB Flash Сенсоры: L3GD20H, LSM303D, MPU 6000, MS5611 Очень хорошо видны отличия от PX4 — новее процессор, нормально работающий до 180МГц (т.е. при нехватке производительности частота будет увеличена со стороны ПО), больше памяти, и новее сенсоры. Так-же дублированы как гироскоп, так и аккселерометр, опять-же для получения более точных данных, и уменьшения виброзависимости. Общий коснтруктив намного более удобен в использовании и является текущей «горячей» аппаратной платформой для APM. Преимущества: + Одноплатный дизайн + Очень большие возможности, в текущих версиях не реализованы до конца. + ОЧЕНЬ хороший ассортимент «плюшек», как то внешние USB порты, выносные LED и т.п. и т.д. Недостатки: — Противные разъемы Hirose DF13, реально мелочь, но сильно портит впечатление — Неудобный монтаж в корпусе, не предусмотрены варианты монтажа с виброразвязкой Отмечу огромное количество клонов, именно КЛОНОВ от китайцев. И тут важно — покупать ТОЛЬКО ревизию 2.4.3. Например покупка ревизии 2.3 — это тупик в никуда. Таких плат было десяток, и на ней есть явные ошибки. Обращайте внимание так-же, что китайцы не воткнули упрощенные сенсоры, они могут. Ниже пример платы хорошего китайского клона
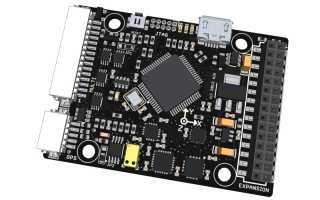
Собственно основная текущая аппаратная платформа APM’а. Де факто — практически то-же самое что и PX4, просто чуть обновленнее, и в намного более удобном конструктиве. Конструктив автоматически решает все проблемы с барометром, конструктив кейса решает вопросы с пылью и прочей нечестью на самой плате, т.к. достаточно неплохо ее защищает. Реально смотря на вещи — это ПЕРВЫЙ рабочий продукт, которым реально пользоваться практически сразу, все остальные так или иначе — полуинженерные «образцы», даже не смотря на популярность(например АРМ2.5 мегапопулярен, но конструктив откровенно неудачный). У «орла» есть свои проблемы — отвратительные коннекторы, и реально проблемная беда с монтажем. Дизайнер проектировавший корпус очень плохо подумал о том как его будут крепить не на самоклейки. Лично я пришел к использованию оного БЕЗ корпуса, но рекомендовать не буду. У меня и плата покрыта защитным лаком, и прочие методы защиты электроники выполнены, естественно с отдельной защитой барометра.Технические характеристики: Процессор: STM32F427 (Cortex M4F), 168МГц (Основной) <complete>+ </complete>STM32F103 (Фейлсейф) Память: ОЗУ/ПЗУ: 256KB RAM / 2048 KB Flash Сенсоры: L3GD20H, LSM303D, MPU 6000, MS5611 Очень хорошо видны отличия от PX4 — новее процессор, нормально работающий до 180МГц (т.е. при нехватке производительности частота будет увеличена со стороны ПО), больше памяти, и новее сенсоры. Так-же дублированы как гироскоп, так и аккселерометр, опять-же для получения более точных данных, и уменьшения виброзависимости. Общий коснтруктив намного более удобен в использовании и является текущей «горячей» аппаратной платформой для APM. Преимущества: + Одноплатный дизайн + Очень большие возможности, в текущих версиях не реализованы до конца. + ОЧЕНЬ хороший ассортимент «плюшек», как то внешние USB порты, выносные LED и т.п. и т.д. Недостатки: — Противные разъемы Hirose DF13, реально мелочь, но сильно портит впечатление — Неудобный монтаж в корпусе, не предусмотрены варианты монтажа с виброразвязкой Отмечу огромное количество клонов, именно КЛОНОВ от китайцев. И тут важно — покупать ТОЛЬКО ревизию 2.4.3. Например покупка ревизии 2.3 — это тупик в никуда. Таких плат было десяток, и на ней есть явные ошибки. Обращайте внимание так-же, что китайцы не воткнули упрощенные сенсоры, они могут. Ниже пример платы хорошего китайского клона PIXHAWK FIRE: На нем стоит остановиться подробнее. Плата — по сути набор сенсоров на «шилде» для Beagle-Bone-Black (далее ВВВ). Но, и это важно — сама по себе ВВВ это очень мощная вещь — 512МБ RAM, 1ГГц Cortex А8 (сравните с M4 в том-же «орле»), 2GB Flash и т.п. + сладкое вида «ускоритель вычислений с плавающей запятой».Т.е. ВВВ по вычислительной мощности ОЧЕНЬ хорош, и та-же Raspbery Pi по сравнению с ВВВ просто олдскул и детская игрушка. _планируется_ на плате по три сенсорных массива каждого типа — 3 акселлерометра, 3 гироскопа, и 3 магнетометра, плюс естественно барометр, MEAS 5611(лучше которого де факто нет, максимум что будет добавлено в новой версии, которую не так давно презентовал MEAS — это сильно улучшенная термокомпенсация, т.к. текущая схема — дает нарастающий дрифт) Собственно это «первый вестник» будущих автопилотов. Мощные процессоры, много памяти, и серьезная борьба с алиасингом, с датчиками на разных частотах автоколебаний механических. На текущий момент — больше «вкус как оно будет», не более того. Продукционные релизы, будут одноплатными. Но речь идет о том, что это +2 года от текущего момента в лучшем случае.AUAV-X1Материал из Multicopter Wiki Перейти к: навигация, поиск
PIXHAWK FIRE: На нем стоит остановиться подробнее. Плата — по сути набор сенсоров на «шилде» для Beagle-Bone-Black (далее ВВВ). Но, и это важно — сама по себе ВВВ это очень мощная вещь — 512МБ RAM, 1ГГц Cortex А8 (сравните с M4 в том-же «орле»), 2GB Flash и т.п. + сладкое вида «ускоритель вычислений с плавающей запятой».Т.е. ВВВ по вычислительной мощности ОЧЕНЬ хорош, и та-же Raspbery Pi по сравнению с ВВВ просто олдскул и детская игрушка. _планируется_ на плате по три сенсорных массива каждого типа — 3 акселлерометра, 3 гироскопа, и 3 магнетометра, плюс естественно барометр, MEAS 5611(лучше которого де факто нет, максимум что будет добавлено в новой версии, которую не так давно презентовал MEAS — это сильно улучшенная термокомпенсация, т.к. текущая схема — дает нарастающий дрифт) Собственно это «первый вестник» будущих автопилотов. Мощные процессоры, много памяти, и серьезная борьба с алиасингом, с датчиками на разных частотах автоколебаний механических. На текущий момент — больше «вкус как оно будет», не более того. Продукционные релизы, будут одноплатными. Но речь идет о том, что это +2 года от текущего момента в лучшем случае.AUAV-X1Материал из Multicopter Wiki Перейти к: навигация, поиск
Описание [править]
PixHawk — полетный контроллер нового поколения, дальнейшая разработка проекта PX4 и программного кода Ardupilot от 3DRobotics.
Особенности [править]
- 32 bit ARM Cortex® M4 процессор и операционная система NuttX RTOS
- 14 PWM/серво выходов (8 с поддержкой failsafe, 6 дополнительных с поддержкой high-power)
- Различные опции подключения дополнительной периферии (UART, I2C, CAN)
- PPM вход поддерживающий современные приемники
- Встроенаая резервная система срабатывающая «На лету» или «Принудительно» работающая на отдельном процессоре и отдельной цепи питания
- Резервная система интегрирует миксеры и автопилот, а так же ручное управление
- Резервная цепь питания запитывает сервоприводы или автоматически дублирует основную
- Внешняя кнопка безопасности для запуска моторов
- Яркий LED индикатор
- Громкоговоритель на пьезо элементе
- Поддержка microSD карт памяти для системных логов
- Возможность подключения одинаковых дублирующих датчиков
- Поддержка цифровых датчиков
- Открытый исходный код и открытая архитектура
- Использование защиты по току на входе и АнтиСтатике (ESD) на выходе
- Поддержка новой инерциальной системы
Технические характеристики [править]
Системная мощность:
- ЦПУ 32 битный STM32F427 Cortex M4 core with FPU
- ОЗУ 168 MHz/256 KB RAM/2 MB Flash
- Сопроцессор 32 bit STM32F103 failsafe co-processor
- Операционная система NuttX RTOS
Датчики и сенсоры:
- Гироскоп: ST Micro L3GD20 3-axis 16-bit
- Акселерометр/магнетометр: ST Micro LSM303D 3-axis 14-bit
- Акселерометр/гироскоп: Invensense MPU 6000 3-axis
- Барометр: MEAS MS5611
Интерфейсы:
- 5x UART (serial ports), 1 с поддержкой high-power, 2x с поддержкой HW flow control
- 2x CAN
- Spektrum DSM / DSM2 / DSM-X® Satellite поддержка приёмников до DX8 включительно (DX9 и более новые не поддерживаются)
- PPM sum signal вход требующий современные приемники
- Futaba S.BUS® совместимый вход / выход
- RSSI (PWM or voltage) вход
- I2C®
- SPI
- 3.3 и 6.6V входы постоянного напряжения
- Внешний микро USB порт
Система питания: Контроллер PixHawk поддерживает три вида питания, одновременно или по отдельности: модуль питания Power Module, шина сервоприводов, USB-порт. Для каждого определён диапазон напряжений 4,1..5,7 В.
- Диодный контроллер дублирующей системы питания
- Шина серво приводов (6 выходов) поддерживает напряжение до 7V и цифровые серво приводы высокого токопотребления
- Все выходы для периферии с токовой защитой (over-current protected), а так же с защитой от статического напряжения (ESD protected)
- Вес 38 грамм
- Ширина 50 мм (1.96″)
- Толщина 15,5 мм (.613″)
- Длина 81,5 мм (3.21″)
Опциональное оборудование [править]
- PPM энкодер для приёмников не поддерживающих PPM выход
- Внешние USB и LED модули
- Цифровой датчик скорости воздуха (для авиамоделей с жёстким крылом)
- Передатчик / приёмник телеметрии для связи с наземной станицией поддержка PC/Mac/Linux
- Приёмник GPS и компасс (необходим для автономных полётов, по маршруту и более точного удержания позиции)
- Оптический сенсор и сонар (для удержания позиции на высоте до 10 метров)
Где купить [править]
- RCcopter.ru: Pixhawk PX4 2.4.8, Pixhawk от Radiolink, Pixraptor, Pixracer
Ссылки [править]
Используемые источники:
- http://uav-done.blogspot.com/2014/04/apm-pixhawk.html
- http://multicopterwiki.ru/index.php/pixhawk
 Идиотизм
Идиотизм Особенности радиального вентилятора и его разновидности
Особенности радиального вентилятора и его разновидности Пуллип - Pullip (Groove)
Пуллип - Pullip (Groove) -ть
-ть