Обновление разделов от: 2018-11-01 19-27
Полетный контроллер ArduPilot Mega является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования — автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Он основан на автопилоте APM 2.x , разрабатываемым сообществом DIY Drones и базирующийся на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.
Сравнительная таблица преимуществ автопилота Ardupilot Mega перед DJI NAZA, Wookoong-M, ZeroUAV (YS-X4,YS-X6), Mikrocopter, Hovefly Pro, uThree
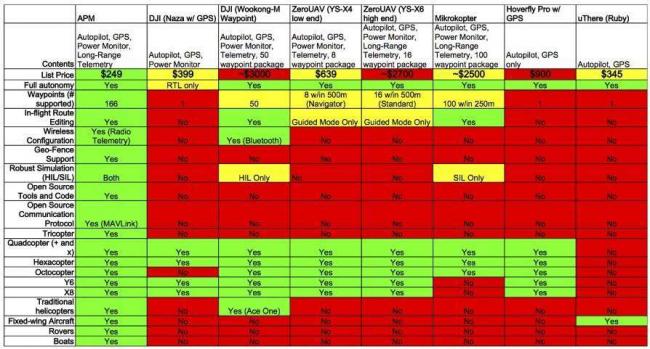
Что мы получаем из коробки:
- Низкую цену
- Полноценный автопилот
- Возможность установить до 166 полетных точек
- Редактирование маршрута в полете
- Беспроводную конфигурацию настроек
- Поддержку Geo-Fence (защита от улёта в виде виртуального забора)
- Открытый исходный код кода и ПО
- Открытый протокол обмена данными
- Поддержка рамы: трикоптера, квадрокоптера (рамы Х, +, H, V), Гексакоптера, Октокоптера, Y6, X8, традиционные вертолеты, самолеты, машинки и лодки
- Поддержка авиасимулятора через ПО Mission Planner
C помощью прошивки может быть установлена на любой радиоуправляемый аппарат:
-
 квадрокоптеры
квадрокоптеры - классический вертолет
- самолет
- машинку
- лодку
Особенности:
- 3 осевой гироскоп, акселерометр, магнитометр (до 2.5.2) и высокоточный барометр
- Система стабилизации с возможностью воздушной акробатики
- Удержание позиции по GPS, полет по точкам и возврат на точку старта
- Возможность использования инфракрасного датчика для обхода препятствий
- Поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки
- Автоматическое следование по маршрутным точкам
- Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC)
- Собственная система стабилизации для камеры (функция контроллера подвеса)
- Радиосвязь и телеметрия с борта
- Поддержка множества рам и конфигураций летающих и ездиющих аппаратов
- Поддержка датчика уровня заряда батареи
- Настраиваемая световая индикация при полетах
- Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов
- Передача в реальном времени телеметрических данных
- Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK
- Конфигурирования точек полета посредством Google Maps
- Бортовая флеш память 16Мбит для автоматической регистрации данных
- Цифровой компас работает на HMC5883L (до версии 2.5.2)
- 6 степеней свободы в InvenSense акселерометре , гироскоп MPU-6000
- Датчик барометрического давления обновлен до MS5611-01BA03 , от Measurement Specialties
- Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB
- Возможно загрузка обновлений встроенного программного обеспечения и конфигурации
Режимы полетов:
- Стабилизация (Stabilize) — Удержание горизонта
- Удержание высоты (AltHold)
- Loiter — замри и слоняйся
- RTL (Return-to-Launch) — вернутся на точку старта
- Auto — выполнение заданного маршрута в автоматическом режиме
- Acro — акробатика
- Sport — для FPV
- Circle — облет по кругу, радиус задается. включая режим Panorama и ROI
- Drift — полет как у самолета
- Follow Me — следуй за мной, доступно при телеметрии со своей GPS
- Guided — указание пункта назначения, доступно в телеметрии.
- Position — фиксация в воздухе с ручным газом взлета
- Land — автоматическая посадка
- Simple and Super Simple — легкий и суперлегкий полет, подходит для новичков
- Квадрокоптер летает за тобой, как AirDog, Hexo+ и другие экшен версии
- Есть возможность самому создать свой режим полета, для этого необходимы навыки программирования
Скачать последнюю версию Mission Planner
 Полетный контроллер APM 2.6,обзор и полная видеоинструкция.
Полетный контроллер APM 2.6,обзор и полная видеоинструкция.
- Цена: 69.76
Полетный контроллер ArduPilot Mega является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования — автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память. Он основан на автопилоте APM 2.x, разрабатываемым сообществом DIY Drones и базирующийся на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов. Что мы получаем из коробки: Низкую цену Полноценный автопилот Возможность установить до 166 полетных точек Редактирование маршрута в полете Беспроводную конфигурацию настроек Поддержку Geo-Fence (защита от улёта в виде виртуального забора) Открытый исходный код и ПО Открытый протокол обмена данными Поддержка рамы: трикоптера, квадрокоптера (рамы Х, +, H, V), Гексакоптера, Октокоптера, Y6, X8, традиционные вертолеты, самолеты, машинки и лодки Особенности:3 осевой гироскоп, акселерометр, магнитометр (до 2.5.2) и высокоточный барометр Система стабилизации с возможностью воздушной акробатики Удержание позиции по GPS, полет по точкам и возврат на точку старта Возможность использования инфракрасного датчика для обхода препятствий Поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки Автоматическое следование по маршрутным точкам Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC) Собственная система стабилизации для камеры (функция контроллера подвеса) Радиосвязь и телеметрия с борта Поддержка множества рам и конфигураций летающих и ездиющих аппаратов Поддержка датчика уровня заряда батареи Настраиваемая световая индикация при полетах Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов Передача в реальном времени телеметрических данных Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK Конфигурирования точек полета посредством Google Maps Бортовая флеш память 16Мбит для автоматической регистрации данных Цифровой компас работает на HMC5883L (до версии 2.5.2) 6 степеней свободы в InvenSense акселерометре, гироскоп MPU-6000 Датчик барометрического давления обновлен до MS5611-01BA03, от Measurement Specialties Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB Возможно загрузка обновлений встроенного программного обеспечения и конфигурации APM ArduCopter является простой в настройке и простой платформой для мультимоторных систем и вертолетов. Сегодня на рынке его особенности выходят далеко за рамки основного ручного управления мультимоторных систем. В отличие от ручного управления мультимоторных систем, ArduCopter является комплексным решением БПЛА, предлагая как класическое радиоуправление, так и автономный полет, в том числе по точкам, планирование миссий и телеметрии, отображаемые на наземной станции. Система Arducopter находится на передовых позициях воздушной робототехники и предназначена для тех людей, которые хотят попробовать современныее технологии и новые стили полета. Планирование всех миссий доступны через опциональную двухстороннюю связь. Путевые точки, смена режимов полета, даже тюнинг может быть сделан с вашего ноутбука, в то время как аппарат находиться в воздухе! Автоматический взлет и посадка. Просто введите аппарат в этот режим и смотрите как ArduCopter сам выполнит свою миссию полностью автономно, вернувшись домой сядет на землю перед вами. В связи с богатым набором функций и полностью автономных возможностей АРМ, кривая обучения может выглядеть несколько пугающим. К счастью набор исчерпывающей информации сделает это стремление очень простым и достижимым. Пожалуйста, не поддавайтесь искушению пропустить шаги и бросаться к быстрому полету. Это робототехника и авиация комбинированного типа из которых являются довольно сложными вещи сами по себе. Следуйте инструкциям и у вас будет свой робот в воздухе. Режимы полетов: Стабилизация (Stabilize) — Удержание горизонта Удержание высоты (AltHold) Loiter — замри и слоняйся RTL (Return-to-Launch) — вернутся на точку старта Auto — выполнение заданного маршрута в автоматическом режиме Acro — акробатика Sport — для FPV Circle — облет по кругу, радиус задается. включая режим Panorama и ROI Drift — полет как у самолета Follow Me — следуй за мной, доступно при телеметрии со своей GPS Guided — указание пункта назначения, доступно в телеметрии. Position — фиксация в воздухе с ручным газом взлета Land — автоматическая посадка Simple and Super Simple — легкий и суперлегкий полет, подходит для новичков Квадрокоптер летает за тобой, как AirDog, Hexo+ и другие экшен версии Плюсы: огромное количество полетных режимов. Можно собрать не только летательные аппараты, но и лодки и машины. Плюсы можно перечислять до бесконечности. Минус всего один: долгая и мучительная настройка контроллера. В комплект входят: 1 x APM2.6 1 x GPS 1 x Модуль питанияКак получить скидку? Моя модель в собранном виде=)




- http://ardupilot.su/
- https://mysku.ru/blog/others/29892.html

 Квадрокоптер DJI Phantom 4
Квадрокоптер DJI Phantom 4 Квадрокоптер Dji Phantom 4 Pro
Квадрокоптер Dji Phantom 4 Pro Обзор модельного ряда квадрокоптеров от Syma: самые удачные модели дронов
Обзор модельного ряда квадрокоптеров от Syma: самые удачные модели дронов Обзор квадрокоптера Xiaomi Mi Drone
Обзор квадрокоптера Xiaomi Mi Drone