Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
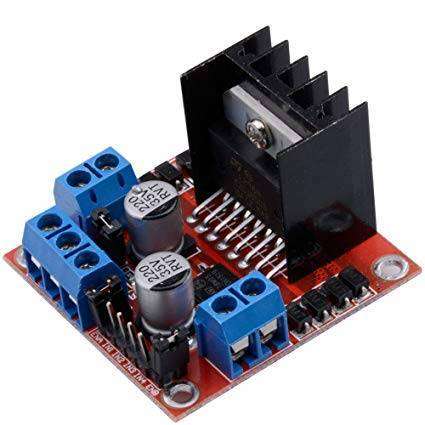
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).
НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Платформа Ардуино 4WD с двигателями, колесами и рамой без электронных компонентов4WD платформа для Ардуино с необычным видом крепления элементовКонструктор машинки Ардуино на платформе 4WD с пультом управления Bluetooth и PS2Типовой набор 4WD машинки с Ардуино, шилдами и основными датчиками
Инструкция по сборке робота-автомобиля
В этой статье расскажем вам о том, как по шагам собрать универсального робота на колесной или гусеничной платформе. Управлять им будет микроконтроллер Ардуино нано. Если вам не нравится долго читать, посмотрите в конце статьи на видео, подготовленное нашими партнерами – каналом ArduMast Club.
Пример платформы робота-машины на Ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант. Главное, чтобы число двигателей не превышало 4 и сами ни не были слишком мощными (тогда придется менять тип управления моторами – другой драйвер двигателя).
Для реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
- Датчик расстояния и серво-мотор, на который он установлен.
- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.
Схема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
 Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress
Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на AliexpressДавайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.
Все достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.
Для добавления контроллера разряда придется внести следующие изменения в схему:
Теперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.
Для зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.
Подключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты. Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.
Затем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
 Arduino Nano 3.0 распиновка
Arduino Nano 3.0 распиновкаПодключаем Bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4
Платформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Программирование робота на Ардуино
Так как мы делаем инструкцию по сборке универсального робота, то неплохо бы предусмотреть все необходимое для разных вариантов ее использования. Весь код вы можете найти в архиве: https://yadi.sk/d/jIYZQDI-GuytMw
Для езды по черной линии мы задействовали 3 пина под датчики линии и три пина для подключения светодиодов, чтобы иметь возможность визуального контроля наличия линии. Другими словами, если под левым сенсором есть черная линия, то загорится левый светодиод и так далее. Кроме того, мы разработали и протестировали схему, в которой будут одновременно использоваться и управление скоростью моторов по ШИМ, и серводвигатель.
Видео инструкция по сборке робота на Ардуино
Предлагаем вашему вниманию подробную видео-инструкцию по сборке робота автомобиля на Ардуино от нашего партнера – канала ArduMast Club.
Надеемся, статья была полезна для вас. В комментариях под видео вы сможете найти код, схемы робота, соединения деталей, скетч и ссылки на интернет-магазины, в которых вы можете купить все необходимые компоненты.
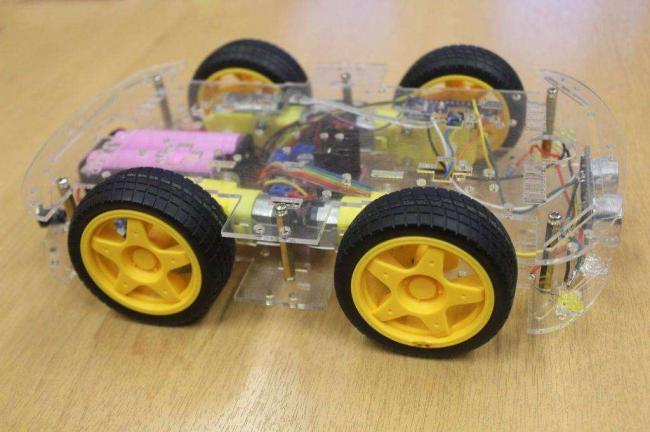
Здравствуйте. В данной статье я хочу описать процесс сборки своего первого робота на ардуино. Материал будет полезен другим таким же новичкам, как и я, которые захотят изготовить какую-нибудь «самобеглую тележку». Статья представляет собой описание этапов работы с моими дополнениями по различным нюансам. Ссылка на итоговый код (скорее всего, не самый идеальный) дана в конце статьи. По мере возможности я привлекал к участию своего сына (8 лет). Что именно с ним получалось, а что нет — на это я выделил часть статьи, возможно, кому-то пригодится.
Общее описание робота
Вначале несколько слов о самом роботе (идея). Собирать что-то типовое на старте не очень хотелось. В то же время, набор компонентов был довольно стандартным — шасси, двигатели, ультразвуковой датчик, датчик линии, светодиоды, пищалка. Вначале из этого «супового набора» был придуман робот, который охраняет свою территорию. Он едет на нарушителя, который пересек линию круга, а потом возвращается в центр. Однако в этом варианте была нужна прочерченная линия, плюс лишняя математика, чтобы постоянно оставаться в круге. Поэтому после некоторых обдумываний я несколько изменил идею и решил делать робота-«охотника». На старте он поворачивается вокруг своей оси, выбирая поблизости цель (человека). Если «жертва» обнаружена, «охотник» включает мигалку и сирену, и начинает ехать на нее. Когда человек отходит/отбегает, робот выбирает новую цель и преследует ее, и так далее. Такому роботу не нужен ограниченный круг, и он может работать на открытой территории. Как видите, это во многом напоминает игру «догонялки». Хотя в итоге робот и не получился достаточно резвым, но он честно взаимодействует с окружающими его людьми. Особенно это нравится детям (иногда, правда, кажется, что они вот-вот растопчут его, аж сердце ёкает…). Думаю, для популяризации технического конструирования это хорошее решение.
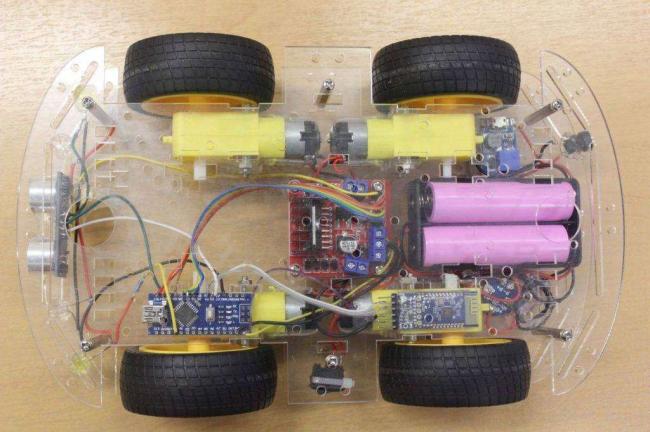
Структура робота
Итак, мы определились с идеей, перейдем к компоновке. Список элементов формируется из того, что должен уметь робот. Тут всё вполне очевидно, поэтому сразу посмотрим на нумерацию: «Мозги» робота — плата arduino uno (1); была в заказанном из Китая наборе. Для наших целей ее вполне хватает (ориентируемся на количество используемых пинов). Из этого же набора мы взяли готовое шасси (2), на которое крепятся два ведущих колеса (3) и одно заднее (свободно вращающееся) (4). Также в наборе был готовый батарейный отсек (5). Спереди у робота стоит ультразвуковой датчик (HC-SR04) (6), сзади — драйвер двигателей (L298N) (7), по центру — светодиод-мигалка (8), и чуть в стороне — пищалка (9). На этапе компоновки мы смотрим: — чтобы все влезло — чтобы было сбалансировано — чтобы было рационально размещено Частично это уже сделали за нас китайские коллеги. Так, тяжелый батарейный отсек поставлен в центр, и примерно под ним стоят ведущие колеса. Все остальные платы легкие, их можно размещать по периферии. Нюансы:
- В шасси из набора есть много заводских отверстий, но какая в них логика — я так и не разобрался. Двигатели и аккумуляторный блок закрепились без проблем, дальше началась «подгонка» со сверлением новых отверстий, чтобы закрепить ту или иную плату.
- Весьма выручили латунные стойки и прочий крепеж из запасников (иногда приходилось выкручиваться).
- Шины от каждой платы пропускал через зажимы (опять же нашел в запасниках). Весьма удобно, все провода лежат красиво и не болтаются.
Отдельные блоки
Теперь пройдусь по блокам и расскажу персонально про каждый.Батарейный отсек Понятно, что робот должен иметь хороший источник энергии. Варианты могут быть разные, я выбрал вариант с 4 аккумуляторами АА. В сумме они дают примерно 5 В, и такое напряжение можно прямо подать на пин 5V платы arduino (минуя стабилизатор). Некоторая настороженность, конечно, у меня была, но это решение вполне работоспособно. Так как питание нужно везде, то для удобства я сделал по центру робота два разъема: один «раздает» землю (справа), а второй — 5 В (слева).Двигатели и драйвер Сначала про крепление двигателей. Крепление заводское, но сделано с большими допусками. Другими словами, двигатели могут «вихлять» на пару миллиметров влево-вправо. Для нашей задачи это не критично, а вот где-то может и влиять (робота начнет уводить в сторону). На всякий случай я выставил двигатели строго параллельно и зафиксировал клеем. Для управления двигателями, как я писал выше, используется драйвер L298N. По документации у него три пина на каждый двигатель: один для изменения скорости и пара пинов для направления вращения. Тут есть один важный момент. Оказывается, если напряжение питания 5 В, то регулировка скорости просто не работает! То есть либо совсем не крутит, либо крутит по максимуму. Вот такая особенность, из-за которой я «убил» пару вечеров. В конце концов, нашел упоминание где-то на одном из форумов. Вообще говоря, низкая скорость вращения мне требовалась при развороте робота — чтобы он имел запас времени просканировать пространство. Но, так как с такой задумкой ничего не вышло, пришлось делать по другому: небольшой поворот — остановка — поворот — остановка и т. д. Опять же, не столь изящно, но работоспособно. Еще здесь добавлю, что после каждого преследования робот выбирает случайное направление нового поворота (по или против часовой стрелки).Ультразвуковой датчик Еще одна железяка, где пришлось искать компромиссное решение. Ультразвуковой датчик на реальных препятствиях дает нестабильные цифры. Собственно, это было ожидаемо. Идеально он работает где-нибудь на соревнованиях, где есть гладкие, ровные и перпендикулярные поверхности, а вот если перед ним «мелькают» чьи-то ноги — тут нужно вводить дополнительную обработку. В качестве такой обработки я поставил медианный фильтр на три отсчета. Исходя из тестов на реальных детях (во время тестов ни один ребенок не пострадал!), его оказалось вполне достаточно для нормализации данных. Физика здесь простая: у нас есть сигналы, отраженные от нужных объектов (дающие требуемое расстояние) и отраженные от более далеких, например, стен. Вторые представляют собой случайные выбросы в измерениях вида 45, 46, 230, 46, 46, 45, 45, 310, 46… Именно их медианный фильтр и отсекает. После всей обработки у нас получается расстояние до ближайшего объекта. Если оно меньше некоторой пороговой величины — тогда мы включаем сигнализацию и едем прямо на «нарушителя».Мигалка и сирена Пожалуй, самые простые элементы из всего перечисленного. Их видно на фотографиях выше. По железу здесь писать нечего, поэтому теперь перейдем к коду.
Программа управления
Расписывать детально код я смысла не вижу, кому нужно — ссылка в конце статьи, там всё достаточно читабельно. А вот общую структуру было бы неплохо объяснить. Первое, что пришлось осмыслить: робот — это устройство реального времени. Точнее, вспомнить, потому что и раньше, и сейчас все равно занимаюсь электроникой. Значит, сразу забываем про вызов delay(), который очень любят использовать в скетчах-примерах, и который просто «замораживает» программу на указанный промежуток времени. Вместо этого, как советуют опытные люди, вводим таймеры на каждый блок. Прошел требуемый промежуток — выполнили действие (увеличили яркость светодиода, включили двигатель и так далее). Таймеры могут быть взаимосвязаны. Так, например, пищалка работает синхронно с мигалкой. Это чуть упрощает программу. Естественно, всё разбиваем на отдельные функции (мигалка, звук, поворот, движение вперед и так далее). Если так не делать, то потом уже не разобраться, что откуда и куда.
Нюансы педагогики
Все, что было описано выше, я делал в свободное время по вечерам. В неспешном режиме я потратил на робота где-то недели три. На этом можно было бы и завершиться, но я еще обещал вам рассказать о работе с ребенком. Что выполнимо в таком возрасте?Работа по инструкции Каждую деталь мы сначала проверяли отдельно — светодиоды, пищалка, моторы, датчики и т. д. Есть большое количество готовых примеров — какие-то прямо в среде разработки, другие можно найти в интернете. Это, несомненно, радует. Берем код, подключаем деталь, убеждаемся, что работает, далее уже начинаем изменять под свою задачу. Подключения по схеме и под некоторым моим контролем ребенок делает сам. Это хорошо. Работать четко по инструкции тоже надо уметь.Порядок работы («от частного к общему») Вот это сложный пункт. Нужно приучать, что большой проект («сделать робота») состоит из мелких задач («подключить датчик», «подключить моторы»…), а те, в свою очередь, из еще более мелких шагов («найти программу», «подключить плату», «загрузить прошивку»…). Выполняя более-менее понятные задачи нижнего уровня, мы «закрываем» задачи среднего уровня, а из них уже складывается общий результат. Объяснял, но, думаю, осознание придет еще не скоро. Где-то, наверное, к подростковому возрасту.Монтаж Сверление, резьбы, винты, гайки, пайка и запах канифоли — куда же без этого. Ребенок получил базовый скилл «Работа с паяльником» — удалось спаять несколько соединений (я чуть-чуть помогал, не скрою). Не забывайте про объяснение техники безопасности.Работа на компьютере Программу для робота писал я, но каких-то попутных результатов все-таки удалось достичь. Первое: английский. В школе его только-только начали, поэтому мы «со скрипом» разбирали, что такое pishalka, migalka, yarkost и прочий транслит. Поняли хотя бы это. Я осознанно не стал использовать родные английские слова, так как до этого уровня мы еще не дошли. Второе: эффективная работа. Учили горячие комбинации клавиш, как быстро выполнять типовые операции. Периодически, когда писали программу, мы менялись с сыном местами, и я говорил, что нужно сделать (замену, поиск и т.д.). Приходилось повторять снова и снова: «выдели двойным кликом», «зажми Shift», «зажми Ctrl» и так далее. Процесс обучения здесь не быстрый, но, я думаю, навыки постепенно отложатся «в подкорку».Скрытый текст Третье: слепая печать. Комментарии в коде я доверил печатать ребенку (пусть тренируется). Сразу поставили правильно руки, чтобы пальцы постепенно запоминали расположение клавиш. Как видите, у нас все еще только-только начинается. Навыки и знания будем оттачивать и дальше, в жизни пригодятся. Кстати, про перспективу…
Дальнейшее развитие
Робот сделан, ездит, мигает и пищит. Что же теперь? Воодушевившись достигнутым, мы планируем дорабатывать его дальше. Есть задумка сделать дистанционное управление — по типу лунохода. Было бы интересно, сидя за условным пультом, контролировать движение робота, который ездит совсем в другом месте. Но это уже будет отдельная история… И в конце, собственно, герои этой статьи (видео по клику): Спасибо за внимание! → Ссылка на код
Уроки по Ардуино для начинающих ► это развитие творческого и конструкторского мышления, вовлечение детей в технические кружки. Программа уроков Arduino разбита на модули по 16 занятий и рассчитана на детей с нулевыми знаниями в электротехнике и программировании. По окончании каждого модуля у ребенка остается робот или «умное» устройство, полностью сделанное своими руками.
Курс «Ардуино для начинающих»
ВведениеАрдуино: что это такое?Алгоритмы в робототехникеОсновные законы электричества
Модуль 1. «Ардуино — Старт»
1.1. Назначение пинов на Ардуино 1.2. Подключение светодиода к Ардуино 1.3. Мигание светодиода на Ардуино 1.4. Включение светодиода кнопкой 1.5. Задержки Ардуино — delay и millis 1.6. Подключение пьезоизлучателя к Ардуино 1.7. Монитор порта Arduino IDE 1.8. Аналоговый и цифровой выход на Ардуино 1.9. Подключение RGB светодиода к Ардуино 1.10. Аналоговые порты на Ардуино 1.11. Подключение потенциометра к Ардуино 1.12. Циклы for и while в Ардуино 1.13. Плавное включение светодиода 1.14. Последовательное включение светодиодов 1.15. Подключение датчика воды к Ардуино 1.16. Подключение фоторезистора к Ардуино 1.17. Подключение тактовой кнопки к Ардуино 1.18. Включение светодиода кнопкой Ардуино 1.19. Подключение датчика LM35 к Ардуино 1.20. Подключение транзистора к Ардуино 1.21. Подключение лазерного светодиода 1.22. Подключение моторчика к Ардуино 1.23. Семисегментный индикатор Ардуино 1.24. Локальные и глобальные переменные
Модуль 2. «Ардуино — Шилд»
2.1. Подключение реле к Ардуино 2.2. Подключение датчика препятствия 2.3. Подключение сервопривода к Ардуино 2.4. Плавное вращение сервопривода 2.5. Управление Ардуино с компьютера 2.6. Подключение датчика звука к Ардуино 2.7. Подключение датчика движения к Ардуино 2.8. Подключение датчика вибрации к Ардуино 2.9. Подключение модуля с кнопкой 2.10. Подключение датчика освещенности 2.11. Подключение ИК приемника к Ардуино 2.12. Подключение УЗ дальномера к Ардуино 2.13. Подключение датчика DHT11 к Ардуино 2.14. Подключение LCD дисплея к Ардуино 2.15. Русский шрифт на LCD дисплее 2.16. Подключение джойстика к Ардуино 2.17. Управление сервоприводом джойстиком 2.18. Как подключить шаговый двигатель 2.19. Подключение датчика цвета к Ардуино 2.20. Подключение мотор шилд к Ардуино 2.21. Подключение датчика пламени Ардуино 2.22. Подключение датчика геркона к Ардуино 2.23. Подключение датчика тока к Ардуино 2.24. Подключение тензодатчика к Ардуино 2.25. Подключение энкодера к Ардуино 2.26. Четырехразрядный семисегментный индикатор
Модуль 3. «Ардуино — IoT»
3.1. Изменение частоты ШИМ Ардуино 3.2. Arduino EEPROM запись, чтение данных 3.3. Подключение LED ленты к Ардуино 3.4. Подключение DS18B20 к Arduino 3.5. Подключение DF Player mini к Ардуино 3.6. Радио модуль nRF24L01: описание, распиновка 3.7. Подключение модуля nRF24L01 к Ардуино 3.8. Подключение блютуз модуля к Ардуино 3.9. Прошивка блютуз модуля HC-05/06 3.10. Подключение модуля HR911105A к Ардуино
Реализуемые проекты
Машинка с управлением от смартфонаЛодка на Ардуино с ИК управлениемМетеостанция на Ардуино и Андроид
Что дают уроки для начинающих по Ардуино? Arduino UNO — это электронный конструктор, пользующийся огромной популярностью благодаря простоте программирования и возможностью создавать устройства, выполняющие разнообразные функции. Программирование производится на языке C++ или при помощи языка визуального программирования Scratch for Arduino.
Используемые источники:
- https://arduinomaster.ru/uroki-arduino/robot-mashinka-avtomobil-arduino/
- https://habr.com/post/436118/
- https://xn--18-6kcdusowgbt1a4b.xn--p1ai/%d1%80%d0%be%d0%b1%d0%be%d1%82%d0%be%d1%82%d0%b5%d1%85%d0%bd%d0%b8%d0%ba%d0%b0-%d0%b0%d1%80%d0%b4%d1%83%d0%b8%d0%bd%d0%be/

 Умный дом на базе Ардуино: пошаговая инструкция по сборке
Умный дом на базе Ардуино: пошаговая инструкция по сборке Что такое Ардуино? Это свобода для изобретателя
Что такое Ардуино? Это свобода для изобретателя Выпуск 2. Основы Arduino для начинающих. Знакомство с Arduino, выбор платы и компонентов для дальнейшей работы
Выпуск 2. Основы Arduino для начинающих. Знакомство с Arduino, выбор платы и компонентов для дальнейшей работы Плата Arduino Uno R3: схема, описание, подключение устройств
Плата Arduino Uno R3: схема, описание, подключение устройств