Однажды, после тяжелого рабочего дня, я пришел домой и понял, что хочу отдохнуть, а не ходить и закрывать шторы. Хочется увидеть их закрытыми вечером и открытыми утром, при этом не выделывать танцы перед окном. Погуглив разные решения, было принято решение сделать все самому.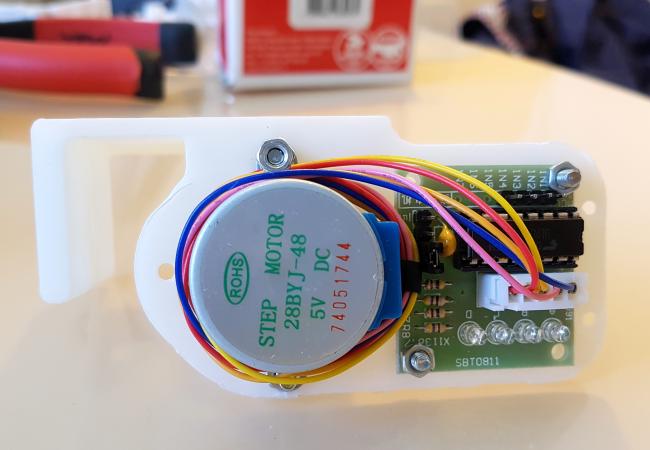 По многочисленным просьбам, выкладываю все свои наработки по переделке обычных рулонных штор в автоматизированные с удаленным управлением. Осторожно, много фотографий!Для начала про рулонные шторы:
По многочисленным просьбам, выкладываю все свои наработки по переделке обычных рулонных штор в автоматизированные с удаленным управлением. Осторожно, много фотографий!Для начала про рулонные шторы:
- Плюсы: рулонные шторы визуально расширяют пространство, красивые и недорогие. Очень простой монтаж. Можно каждым окном управлять отдельно. Высвобождается место на подоконнике.
 Немного про задачи: Необходимо добавить к обычным рулонным шторам из строительного магазина удаленное управление и подключить к умному дому на openSource платформе Home Assistant. И еще необходимо сохранить обычное управление за веревочку.
Немного про задачи: Необходимо добавить к обычным рулонным шторам из строительного магазина удаленное управление и подключить к умному дому на openSource платформе Home Assistant. И еще необходимо сохранить обычное управление за веревочку. Выбор моторов: Если все автоматизировать, то скорость не играет роли, поэтому можно применять двигатели с редуктором. Коллекторные двигатели дешевые, но не самая надежная вещь для ежедневного применения. Сервомашинки тоже имеют коллекторные двигатели и плюс не стабильные при постоянном вращении. Отличным вариантом выглядят шаговые двигатели. Бесшумные, можно контролировать положение, стоят копейки. В итоге, комплект из 5 двигателей 28BYJ-48 с драйвером ULN2003 обошелся мне в 10$Про двигатель 28BYJ-48: Подробно о нем можно почитать здесь. Были вопросы о мощности этого двигателя. Опасения что он будет слабым, не оправдались. Вернее так — если использовать полношаговый режим, то двигатель очень хилый, если использовать полушаговый, то вал уже голыми руками не остановить. Кому будет мало мощности, в интернете много статей как приподнять напряжение, превратить его в биполярный и прочие улучшения.Про датчики: Так как у нас осталось ручное управление, и мы не хотим впустую гонять двигатель, то необходимы датчики положения штор. Минимум необходим один датчик на одном конце, но лучше два. Можно использовать любой концевой, оптический и т.д., но я лично выбрал герконовый, т.к. приклеить неодимовый магнитик с другой стороны очень просто и работать должен стабильно и долговечно. Сами герконы я выбрал для эстетики уже в корпусе. Плюс предусмотрел настройку по расстоянию от вала. По высоте можно регулировать проставками.Про конструкцию крепления: Задача была спроектировать корпус максимально простой для изготовления на 3д принтере с минимальными доработками. Моделировал в Fusion 360. Комплектное крепление цепляется за верх окна, но такую конструкцию на FDM принтере будет трудно сделать с нужными требованиями по прочности, поэтому была придумана конструкция с одним винтом для регулировки. Итого получилось три детали для 3д-печати. Ссылка для скачивания 3д-моделей. Основная часть для двигателя, платы управления на ULM2003, креплением герконов, двигателей, лески для стабилизации штор, и регулировочного винта. Крышка для закрытия всего этого безобразия. Зажим или по-другому крюк. Сама конструкция штор содержит несколько пружин, которые работают как тормоз если тянуть за шторы(пружина затягивается) или отпускает если крутить за веревку.
Выбор моторов: Если все автоматизировать, то скорость не играет роли, поэтому можно применять двигатели с редуктором. Коллекторные двигатели дешевые, но не самая надежная вещь для ежедневного применения. Сервомашинки тоже имеют коллекторные двигатели и плюс не стабильные при постоянном вращении. Отличным вариантом выглядят шаговые двигатели. Бесшумные, можно контролировать положение, стоят копейки. В итоге, комплект из 5 двигателей 28BYJ-48 с драйвером ULN2003 обошелся мне в 10$Про двигатель 28BYJ-48: Подробно о нем можно почитать здесь. Были вопросы о мощности этого двигателя. Опасения что он будет слабым, не оправдались. Вернее так — если использовать полношаговый режим, то двигатель очень хилый, если использовать полушаговый, то вал уже голыми руками не остановить. Кому будет мало мощности, в интернете много статей как приподнять напряжение, превратить его в биполярный и прочие улучшения.Про датчики: Так как у нас осталось ручное управление, и мы не хотим впустую гонять двигатель, то необходимы датчики положения штор. Минимум необходим один датчик на одном конце, но лучше два. Можно использовать любой концевой, оптический и т.д., но я лично выбрал герконовый, т.к. приклеить неодимовый магнитик с другой стороны очень просто и работать должен стабильно и долговечно. Сами герконы я выбрал для эстетики уже в корпусе. Плюс предусмотрел настройку по расстоянию от вала. По высоте можно регулировать проставками.Про конструкцию крепления: Задача была спроектировать корпус максимально простой для изготовления на 3д принтере с минимальными доработками. Моделировал в Fusion 360. Комплектное крепление цепляется за верх окна, но такую конструкцию на FDM принтере будет трудно сделать с нужными требованиями по прочности, поэтому была придумана конструкция с одним винтом для регулировки. Итого получилось три детали для 3д-печати. Ссылка для скачивания 3д-моделей. Основная часть для двигателя, платы управления на ULM2003, креплением герконов, двигателей, лески для стабилизации штор, и регулировочного винта. Крышка для закрытия всего этого безобразия. Зажим или по-другому крюк. Сама конструкция штор содержит несколько пружин, которые работают как тормоз если тянуть за шторы(пружина затягивается) или отпускает если крутить за веревку.


Электропривод выполнен на базе миниатюрного 4-х фазного шагового двигателя 28BYJ-48-12V . Двигатель имеет редуктор с передаточным числом приблизительно 64:1, что обеспечивает достаточно приличный крутящий момент для такого размера двигателя и скорость вращения ~15 об/мин.
-
Схема фаз двигателя 28BYJ-48-12V -
Передаточное число редуктора двигателя 28BYJ-48-12V составляет примерно 64:1.
Контроллер
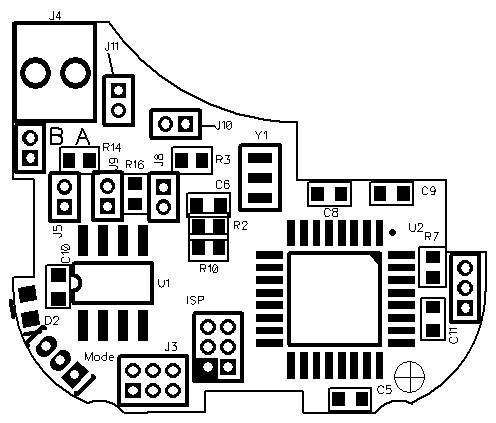
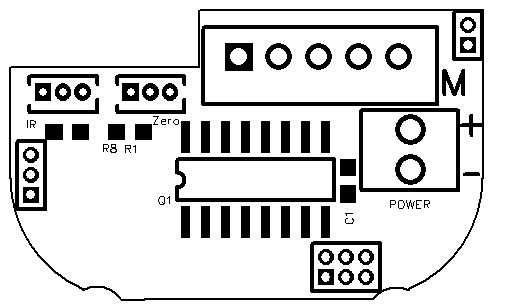
В качестве мозга электропривода использован микроконтроллер Atmega328. Он общается с внешним миром через шину RS485, по протоколу ModBus, шина выполнена на микросхеме MAX485. Шаговый двигатель подключается через транзисторную сборку Дарлингтона — ULN2003. В качестве датчика нулевой точки использован датчик Холла A3144, он служит для определения верхней нулевой точки (Zerro) положения шторы. Еще один датчик Холла (Mode) припаян непосредственно на самой плате и выполняет следующие функции:
- Активация режима обучения
- Аварийный останов двигателя
- Сброс контроллера на заводские установки
Дополнительно на плате контроллера предусмотрены входы для фоторезистора (например vt90n) и герконового датчика открытия окна.
Код прошивки микроконтроллера написан в среде Arduino IDE и находится в открытом доступе на моей странице GitHub.
Принцип работы
После подачи питания устройство несколькими миганиями светодиода, установленного на плате, сигнализирует о включении. После включения питание на двигатель не подается, штора находится в неподвижном состоянии.
Для того чтобы контроллер знал текущее положение шторы его необходимо обучить. Для этого в ручную опускаем штору в нижнее положение на необходимую длину, подносим кратковременно магнит к датчику Mode на контроллере (датчик установлен в районе светодиода), при этом светодиод начнет мигать, сигнализируя активацию режима обучения, на двигатель подается управляющий сигнал и штора начинает двигаться вверх до верхней нулевой точки где останавливается по сигналу от датчика Холла установленного в креплении корпуса контроллера. Контроллер при этом запоминает количество шагов двигателя и сохраняет это значение в энергонезависимой памяти EEPROM микроконтроллера.
Если к датчику Mode поднести кратковременно магнит во время движения шторы, то контроллер сразу остановит движение.
Для сброса контроллера на заводские установки необходимо поднести магнит к датчику Mode не менее чем на 5 секунд, при этом светодиод начнет быстро мигать, контроллер перезагрузится и установит все значения параметров на заводские.
 Жало НАККО T12K после нескольких лет использования , взял да распилил
Жало НАККО T12K после нескольких лет использования , взял да распилилДля управления положением шторы используется регистр set_position, положение задается значением от 0 до 100, где 0 — открыто, штора находится в верхней точке, а 100 — полностью закрыто, штора находится в нижнем положении.
Если в конфигурации контроллера активировать функцию «Определение текущего положения шторы после подачи питания» — регистр check pos flag (0- выключено, 1 — включено), то сразу после подачи напряжения на контроллер, штора начнет движение вверх до верхней точки, в этот момент контроллер запоминает количество шагов и по достижении верхней нулевой точки, штора возвращается в положение в котором находилась до момента подачи питания. Эта функция служит для определения положения шторы например когда отключили электричество. Если эта функция отключена, то при подачи питания штора остается в текущем положении до момента подачи команды set_position, как только контроллер получит первую, после подачи питания, команду он сначала запустит функцию определения текущего положения шторы и только после этого выставит положение шторы поступившее командой set_position.
Таблица данных регистров ModBus
Стандарт ModBus предусматривает отдельную таблицу для каждого типа данных, в контроллере же все данные хранятся в одном массиве в виде перекрывающихся таблиц. Значение всех регистров и адресов представлены в таблице:
Корпус контроллера
Корпус для устройства был спроектирован в программном комплексе Autodesk Fusion 360 и распечатан на 3D принтере из ABS пластика. Точность печати меня не устроила, поэтому детали корпуса были зашпатлеваны, отшлифованы, загрунтованы и окрашены акриловой краской из баллончика, это скрыло все изъяны 3D печати. После чего была изготовлена силиконовая форма и корпуса были отлиты из жидкого полиуретана. Про изготовление корпусов методом литья жидкого полиуретана в силиконовые формы постараюсь описать отдельной статьей.
Скачать: Детали корпусу в STL форматеСкачано: 96, размер: 562.0 KB, дата: 12.Янв.2019
Доработка механизма рулонной шторы
-
Внешний вид механизма рулонной шторы. Нам необходимо обрезать козырек над шестерней цепочки -
Нажимаем плоскогубцами защелку -
Снимаем верхнюю втулку -
Выступ во втулке служит механизмом стопора, при попытке размотать штору за полотно, выступ упирается в пружины и тем самым сжимает их на валу не позволяя втулке вращаться. -
Полностью разобранный механизм -
Сначала откусываем козырек бокорезами -
Зажимаем в патрон шуруповерта -
На крупнозернистой наждачной бумаге немного стачиваем край по окружности до нужного диаметра -
Должно получиться примерно вот так -
Примеряем, проворачиваем вал и смотри чтобы ничего не задевало и не подклинивало -
Собираем все в обратной последовательности -
Идеально
Немного про организацию моего подключения контроллеров электропривода рулонных штор
У меня в каждом окне стоит «комнатный» контроллер построенный на Arduino UNO + Ethernet Shield W5100, в задачи которого входит сбор показаний температуры воздуха в приточном клапане вентиляции, температуры радиаторов отопления (DS18B20), температуры и влажности помещения (DHT22), передача сигнала датчика движения (DSC LC-101) и датчика открытия окна (геркон), а так же управление сервоприводом приточной вентиляции.
Я решил добавить в него еще и функцию прослойки между шиной RS485 рулонных штор и сервером IoBroker, данные в который передаются по протоколу MQTT. Таким образом у меня на этот «комнатный» контроллер легли функции мастера сети ModBus. Все контроллеры штор одного окна подключены по шине RS485 к мастеру, он с периодом 2 секунды опрашивает подчиненных (контроллеры штор) и отдает текущие данные по протоколу MQTT на сервер умного дома IoBroker.
Так же мастер принимает команды по MQTT от сервера и отправляет их подчиненным. Так как подчиненных несколько и мастер не может одновременно отправить управляющие команды сразу всем, а по MQTT практически одновременно может поступить несколько команд (например команда открыть 1,2 и 3 штору) то мастер отработает только первую. Чтобы команды не терялись на мастере был организован буфер, что то подобное FIFO (англ. first in, first out — «первым пришёл — первым ушёл»). пришедшие данные по MQTT записываются в массив после чего мастер по в общем цикле программы проверяет свободность шины RS485 и отправляет команду ModBus из нулевого элемента массива очереди, сдвигает данные команд массива влево и цикл повторяется пока в массиве очереди есть данные.
Подключение электропривода
Для подключения контроллера используется всего 4 провода, 2 из них это +-12 В — питание контроллера и двигателя, и 2 провода для шины RS485.
 Шьем меховой чехол на кресло автомобиля из старой дубленки
Шьем меховой чехол на кресло автомобиля из старой дубленкиСкачать: Гербер файлы плат контроллераСкачано: 42, размер: 166.7 KB, дата: 12.Янв.2019
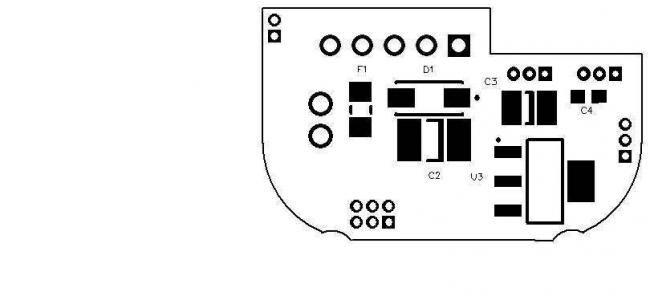
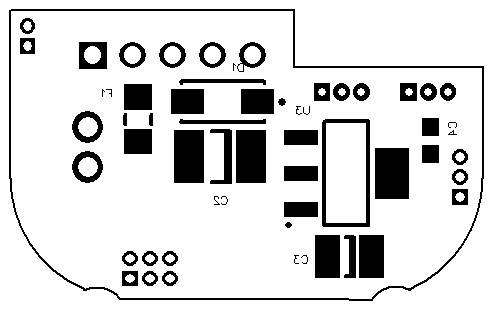
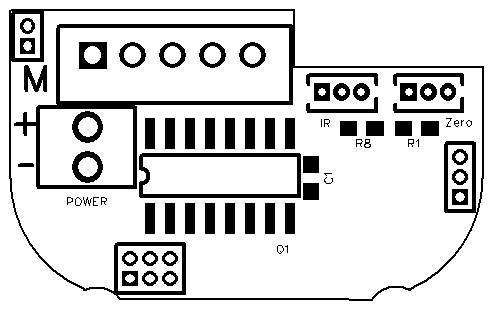
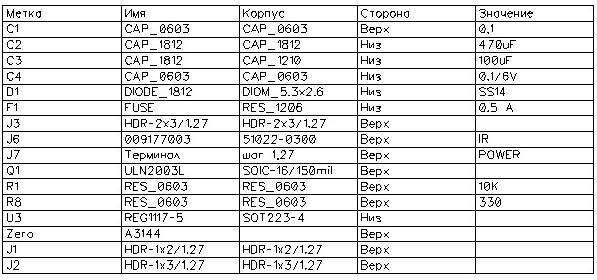
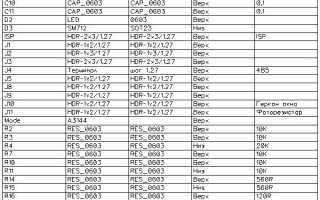
Фотографии устройства
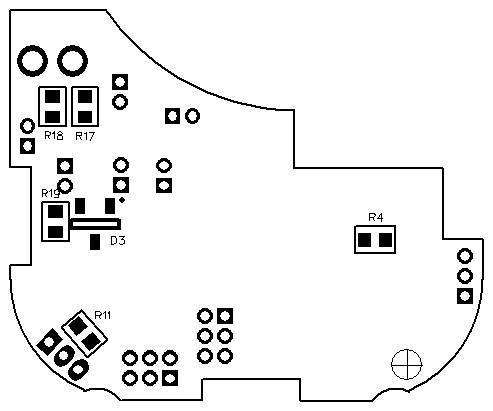
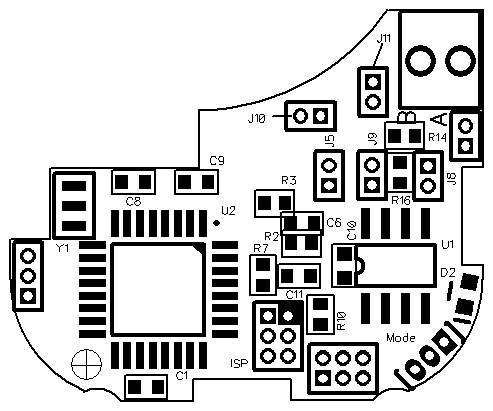
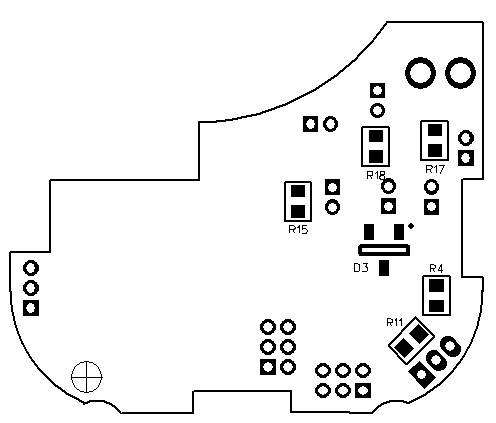
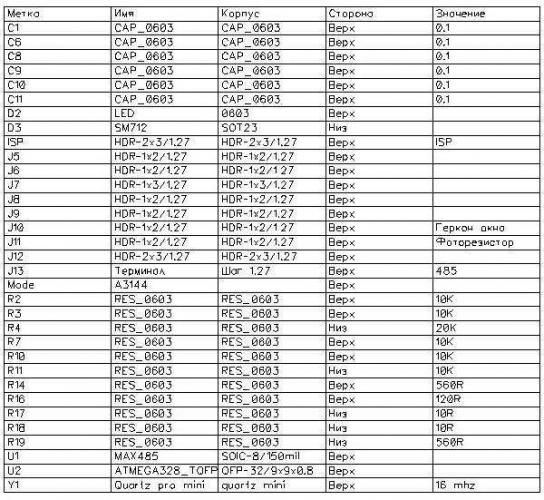
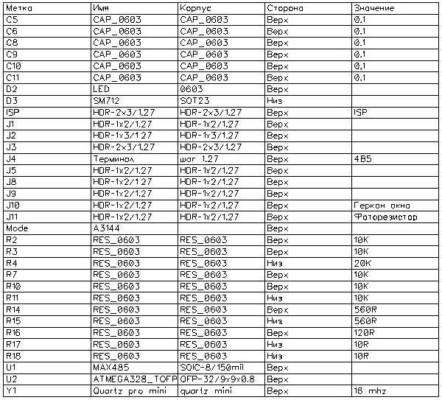
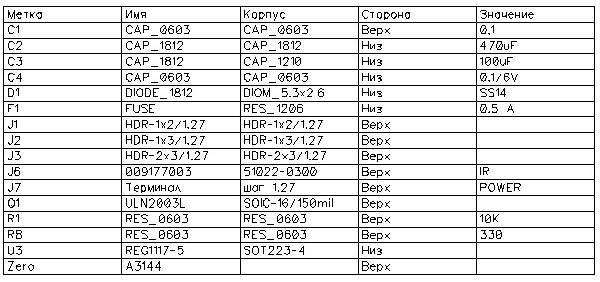
Список и расположение элементов на платах
Видео работы электропривода
Люди занимающиеся самодельным конструированием наверняка стараются сделать что-либо полезное для быта. В идеале наибольшее удовлетворение вызовут полезные конструкции которых просто нет и купить их невозможно. Сделать такую полезную вещь все сложнее и сложнее. Но можно пользу получить и от самодельных конструкций, которые выполняют функционал покупных устройств, но обходятся по цене значительно дешевле. Предлагаю способ изготовления устройства по цене значительно ниже готового устройства в магазине.
Рулонные шторы благодаря удобству и практичности проникают в наш быт. Купленная в свое время штора очень хорошо защищала комнату от солнечного света. Но кроме дешевых штор в продаже были и шторы с механическим приводом по цене дороже простых от 8 до 15 раз. Построить штору с мотором удалось купив деталей на 300 рублей (2009 год).
Как сделать механизм для шторы своими руками
1. В качестве привода шторы применена электрическая отвертка купленная на распродаже за 250 рублей. В комплект отвертки входил набор не совсем плохих бит, удлинители для бит и зарядное устройство. Один удлинитель бит потребуется для устройства.
2. Разбираем отвертку. Отвертка питается от 3 аккумуляторов формата АА непонятной емкости.
3. Батарейный отсек отсоединяем и удлиняем провода питания от него на длину 2-2.5метра.
4. Блок электродвигателя и редуктора в моем случае пришлось доработать, так как электродвигатель необходимо было разместить в узком пространстве оконного проема. Доработка заключалась в укорочении корпуса.
5. Узел соединения привода со шторой понятен из фотографии. В кабельном сальнике подходящего диаметра закреплен удлинитель крепления бит. Сам сальник устанавливается в торец корпуса намотки шторы вместо штатной заглушки. Сальник должен плотно фиксироваться в торце.
6. Привод крепится к закрепленной в оконном проеме строительной скобе. Первоначально моторный отсек крепился при помощи кабельных стяжек. В дальнейшем стяжки были заменены скобами из строительной ленты.
 Мультиметр HoldPeak HP-890CN - отзывы
Мультиметр HoldPeak HP-890CN - отзывы7. Закрепив двигатель монтируем штору. Штора должна быть установлена строго горизонтально.
Управляем работой шторы при помощи реверсивного выключателя на блоке питания. Была поставлена цель установить на штору стационарное питание и автоматику, но об этом в следующем блоге.
Используемые источники:
- https://habr.com/post/374285/
- https://blog.instalator.ru/archives/1275
- https://sekret-mastera.ru/masterim/rimskaya-shtora-s-privodom-svoimi-rukami.html
 Робот-пылесос iLife V55 с функцией влажной уборки
Робот-пылесос iLife V55 с функцией влажной уборки Usb тестер keweisi kws-v20(V,A,mAh,T-время)
Usb тестер keweisi kws-v20(V,A,mAh,T-время) LiitoKala Lii-402 - зарядное устройство на 4 аккумулятора
LiitoKala Lii-402 - зарядное устройство на 4 аккумулятора Двухканальный/двухлучевой осциллограф JDS2022A с красивым названием JINHAN
Двухканальный/двухлучевой осциллограф JDS2022A с красивым названием JINHAN