Каждый робот, способный ездить, летать или плавать, должен видеть препятствия, находящиеся у него на пути. Чтобы робот смог это сделать, ему необходимы соответствующие датчики. В английской литературе такие устройства называют proximity sensor, мы же их будем называть датчиками препятствия. На этом уроке мы рассмотрим один из самых распространенных датчиков препятствия, который работает по принципу отражения. Устроен он очень просто. Датчик содержит направленный источник света и детектор света. Источником часто служит инфракрасный светодиод с линзой, а детектором — фотодиод или фототранзистор. 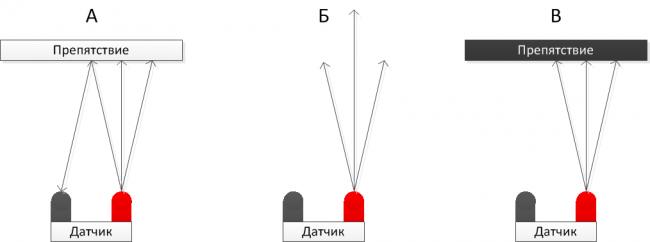 Светодиод на датчике постоянно включен и излучает узкий пучок света в прямом направлении. Если перед датчиком есть препятствие (рисунок А), то на детектор попадает отраженный свет от источника, и на выходе датчика появляется положительный импульс. В противном случае, если препятствия нет, то датчик молчит (рисунок Б). Есть и третий вариант, когда препятствие есть, но свет от него не отражается! На рисунке В изображен как раз такой случай. Получается, матовую черную поверхность робот не увидит.
Светодиод на датчике постоянно включен и излучает узкий пучок света в прямом направлении. Если перед датчиком есть препятствие (рисунок А), то на детектор попадает отраженный свет от источника, и на выходе датчика появляется положительный импульс. В противном случае, если препятствия нет, то датчик молчит (рисунок Б). Есть и третий вариант, когда препятствие есть, но свет от него не отражается! На рисунке В изображен как раз такой случай. Получается, матовую черную поверхность робот не увидит.
1. Подключение
Будем подключать самый простой датчик с цифровым выходом. Принципиальная схема подключения к выводам Ардуино Уно: 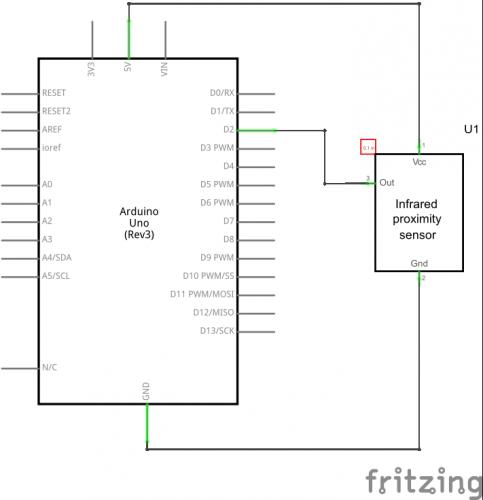 Внешний вид макета
Внешний вид макета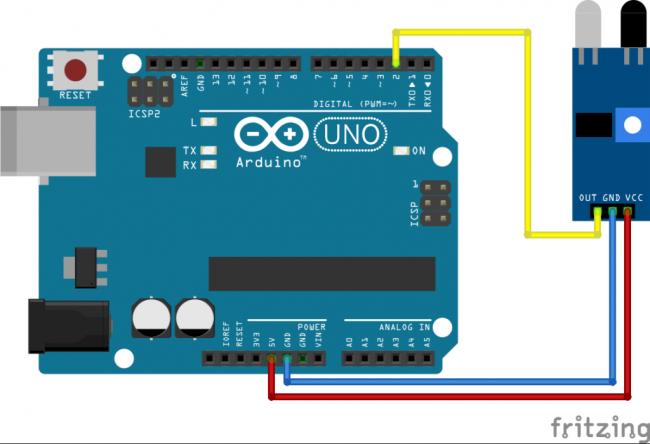
2. Настройка чувствительности
Как известно, вокруг нас имеется множество источников инфракрасного излучения, включая лампы освещения и солнце. Фоточувствительный элемент датчика регистрирует это фоновое излучение, и может дать ложный сигнал срабатывания. Другими словами, датчик препятствия может сработать, когда никакого препятствия и нет вовсе. Чтобы решить эту проблему, на датчике имеется возможность настроить чувствительность таким образом, чтобы воспринимать только свет достаточной силы. Обычно это реализуется с помощью компаратора — электронного устройства, позволяющего сравнивать два уровня напряжения. Одно напряжение подается на компаратор с фотодиода, а другое с делителя напряжения на основе потенциометра. Второе напряжение будем называть пороговым. Теперь датчик даст положительный сигнал только тогда, когда напряжение на фотодиоде станет больше, чем настроенное нами. Для настройки порогового напряжения нам понадобится шлицевая отвертка (она же — плоская). В этой процедуре нам также поможет зеленый светодиод состояния, который загорается когда датчик регистрирует достаточный уровень инфракрасного света. Алгоритм настройки сводится к трем шагам:
- помещаем датчик в условия освещенности, в которых он будет работать;
- подключаем датчик к питанию, при этом на нем загорится красный светодиод;
- убираем перед датчиком все препятствия, и крутим потенциометр до тех пор, пока зеленый светодиод состояния не погаснет.
Для проверки поднесем к датчику ладонь, и на определенном расстоянии загорится зеленый светодиод. Уберем руку — светодиод погаснет. Расстояние на котором датчик регистрирует препятствие зависит от уровня фоновой засветки, от настройки чувствительности и от правильного расположения фотодиода и светодиода на датчике. Они должны быть расположены строго параллельно друг другу. Теперь, когда датчик настроен должным образом, приступим к составлению программы.
3. Программа
Для примера, будем зажигать и гасить штатный светодиод №13 на Ардуино Уно, в зависимости от показаний датчика. При использовании цифрового датчика, программа будет такой же, как и в случае работы с кнопками. На каждой итерации цикла loop мы считываем значение на выводе №2, и затем сравниваем это значение с уровнем HIGH. Если значение равно HIGH, значит датчик видит препятствие, и мы зажигаем светодиод на выводе №13. В противном случае — гасим светодиод.
const int prx_pin = 2; const int led_pin = 13; byte v; void setup() { pinMode(prx_pin, INPUT); pinMode(led_pin, OUTPUT); } void loop() { v = digitalRead( prx_pin ); if( v == HIGH ) digitalWrite( led_pin, HIGH ); else digitalWrite( led_pin, LOW ); }
4. Пример использования
Попробуем теперь применить цифровой датчик по прямому назначению. Заставим двухколесного робота реагировать на показания двух датчиков, размещенных слева и справа. Сделаем так, чтобы при обнаружении препятствия робот отворачивал от него в противоположную сторону, а затем продолжал движение вперед. Оформим программу в виде блок-схемы процедуры loop.
Задания
Если все получилось, попробуйте выполнить еще несколько заданий с роботом.
- Направить датчики препятствия вниз, чтобы робот смог чувствовать край стола. Написать программу, которая предотвращает падение робота со стола.
- Снова направить датчики вниз, но на этот раз для другой цели. Как мы выяснили, датчик может отличить черную поверхность от белой. Воспользуйтесь этим свойством, чтобы сделать робота-следопыта (он же LineFollower).
- Направить датчики в стороны, и заставить робота двигаться вдоль стены.
Заключение
На следующем уроке мы познакомимся с датчиком, который устроен практически так же, но больше подходит для детектирования черных и белых поверхностей. Попробуем считывать уже не цифровой, а аналоговый сигнал датчика, чтобы сделать более совершенного робота-следопыта.2+
Arduino Рассмотрим подключение нескольких инфракрасных сенсоров к Arduino.
Для проекта нам понадобятся:
 Подключение фоторезистора к ардуино и работа с датчиком освещенности
Подключение фоторезистора к ардуино и работа с датчиком освещенности- Arduino UNO или иная совместимая плата;
- инфракрасный датчик препятствий;
- инфракрасный приёмник;
- соединительные провода (рекомендую вот такой набор);
- макетная плата (breadboard);
- персональный компьютер со средой разработки Arduino IDE.
1Описание и принцип действия ИК датчика препятствий
Инфракрасное (ИК) или infrared (IR) излучение – это невидимое человеческим глазом электромагнитное излучение в диапазоне длин волн от 0,7 до 2000 мкм. Вокруг нас существуют огромное количество объектов, которые излучают в данном диапазоне. Его иногда называют «тепловое излучение», т.к. все тёплые предметы генерируют ИК излучение.
Модули на основе ИК излучения используются, в основном, как детекторы препятствий для различного рода электронных устройств, начиная от роботов и заканчивая «умным домом». Они позволяют обнаруживать препятствия на расстоянии от нескольких сантиметров до десятков сантиметров. Расстояние до препятствия при этом определить с помощью ИК-сенсора невозможно.
Если оснастить, для примера, своего робота несколькими такими ИК модулями, можно определять направление приближения препятствия и менять траекторию движения робота в нужном направлении.
Модуль сенсора обычно имеет излучатель (светодиод) и детектор (фотодиод) в инфракрасном диапазоне. Инфракрасный светодиод излучает в пространство ИК излучение. Приёмник улавливает отражённое от препятствий излучение и при определённой интенсивности отражённого излучения происходит срабатывание. Чтобы защититься от видимого излучения, фотодиод имеет светофильтр (он выглядит почти чёрным), который пропускает только волны в инфракрасном диапазоне. Разные поверхности по-разному отражают ИК излучение, из-за чего дистанция срабатывания для разных препятствий будет отличаться. Выглядеть ИК модуль может, например, вот так:
Когда перед сенсором нет препятствия, на выходе OUT модуля напряжение логической единицы. Когда сенсор детектирует отражённое от препятствия ИК излучение, на выходе модуля напряжение становится равным нулю, и загорается зелёный светодиод модуля.
Помимо инфракрасного свето- и фотодиода важная часть модуля – это компаратор LM393 (скачать техническое описание на LM393 можно в конце статьи). С помощью компаратора сенсор сравнивает интенсивность отражённого излучения с некоторым заданным порогом и устанавливает «1» или «0» на выходе. Потенциометр позволяет задать порог срабатывания ИК датчика (и, соответственно, дистанцию до препятствия).
2Подключение ИК датчика препятствийк Arduino
Подключение ИК модуля к Arduino предельно простое: VCC и GND модуля подключаем к +5V и GND Arduino, а выход OUT сенсора – к любому цифровому или аналоговому выводу Arduino. Я подключу его к аналоговому входу A7.
3Скетч Arduino для инфракрасного датчика препятствий
Скетч для работы с инфракрасным сенсором препятствий также предельно простой: мы будем читать показания с выхода модуля и выводить в монитор порта. А также, если ИК модуль обнаружил препятствие, будем сообщать об этом.
Напомню, в Arduino используется 10-разрядный АЦП, поэтому значение аналогового сигнала кодируется числом в диапазоне от 0 до 1023. При использовании аналогового входа Arduino предельные значения «0» или «1023» мы вряд ли получим с датчика, поэтому лучше использовать некоторый порог, например, равный 100 (поэтому в скетче r < 100). При использовании же цифрового вывода Arduino для чтения показаний инфракрасного датчика, можно можно написать (r == LOW) или (r == 0) или (r < 1).
 Умный дом на базе Ардуино: пошаговая инструкция по сборке
Умный дом на базе Ардуино: пошаговая инструкция по сборкеХорошая статья про аналоговые измерения на Arduino.
Думаю, довольно понятно, как найти применение такому модулю в ваших проектах. Необходимо периодически опрашивать состояние на выходе модуля, и как только напряжение меняется с HIGH на LOW, предпринимать необходимые действия: менять направление движения робота, включать свет в помещении и т.п.
4Подключение к Arduino модуля с инфракрасным приёмником
ИК датчик может состоять из одного только инфракрасного приёмника, как в этом случае:
Такой сенсор используется для детектирования и считывания различных инфракрасных сигналов. Например, таким датчиком можно принять управляющие сигналы ИК пульта от телевизора или другой бытовой техники. На модуле присутствует светодиод, который загорается, когда на приёмник попадает инфракрасное излучение. На выхода модуля – цифровой сигнал, который показывает, падает ли на сенсор ИК излучение или нет.
К Arduino модуль с ИК приёмником подключается тоже очень просто:
| Пин модуля | Пин Arduino | Назначение |
|---|---|---|
| DAT | Любой цифровой | Признак наличия ИК излучения на входе приёмника |
| VCC | +5V | Питание |
| GND | GND | Земля |
Напишем скетч, в котором будем просто показывать с помощью встроенного светодиода, что на входе приёмника присутствует ИК излучение. В данном модуле аналогично с ранее рассмотренным на выходе DAT уровень «0», когда ИК излучение попадает на приёмник, и «1» когда ИК излучения нет.
Если загрузить этот скетч в Arduino, направить на ИК приёмник ИК пульт и нажимать на нём разные кнопки, то мы увидим, что светодиод нашего индикатора быстро мигает. Разные кнопки – по-разному мигает.
Очевидно, что каждая команда закодирована своей бинарной последовательностью. Хотелось бы увидеть, какие именно команды приходят от пульта. Но прежде чем ответить на этот вопрос, нужно посмотреть другим способом, что же отправляет пульт. А именно – с помощью осциллографа. Подключим осциллограф DS203 к тому месту, где сигнал непосредственно излучается в пространство: к аноду инфракрасного светодиода.
На осциллограмме видна серия «пачек» импульсов примерно одинаковой длительности. Каждая «пачка» состоит из 24-х импульсов.
 Arduino Nano 3.0 распиновка
Arduino Nano 3.0 распиновкаВ таком виде довольно трудно увидеть, какой сигнал передаётся от пульта ДУ. Прелесть нашего приёмника в том, что он выполняет рутинную работу по оцифровке аналогового инфракрасного сигнала и выдаёт уже «красивый» цифровой сигнал. Давайте посмотрим его на осциллографе.
Вот так выглядит посылка пульта целиком. Здесь жёлтая линия – аналоговый сигнал пульта ДУ, голубая – цифровой сигнал с выхода ИК приёмника. Видно, что продолжительность передачи составляет примерно 120 мс. Очевидно, время будет несколько варьироваться исходя из того, какие биты присутствуют в пакете.
При большем приближении видно, что высокочастотное заполнение, которое имеется в аналоговом сигнале, в цифровом сигнале с ИК приёмника отсутствует. Приёмник прекрасно справляется со своей задачей и показывает чистый цифровой сигнал. Видна последовательность коротких и длинных прямоугольных импульсов. Длительность коротких импульсов примерно 1,2 мс, длинных – в 2 раза больше.
Мы уже видели подобный сигнал, когда разбирали сигнал комнатной метеостанции. Возможно, здесь применяется тот же способ кодирования информации: короткие импульсы – это логический ноль, длинные – логическая единица. На следующем видео можно посмотреть пакет целиком:
Если зарисовать этот пакет, то получится как-то так:
Дальнейшие исследования показали, что все пакеты данного пульта ДУ состоят из двух пачек импульсов. Причём первая всегда содержит 35 бит, вторая – 32.
Есть несколько вариантов, как поступить для получения цифровых данных пакета:
- опрашивать пакет через равные промежутки времени (т.н. «стробирование»), а затем принимать решение, это логический «0» или «1»;
- ловить фронты импульсов (детектор фронта), затем определять их длительность и также принимать решение, какой это бит.
Напомню, что будем считать короткие импульсы логическим нулём, длинные – логической единицей.
Для реализации первого варианта понятно, с какой частотой необходимо опрашивать ИК датчик, чтобы принимать с него корректные данные: 600 мкс. Это время в два раза меньшее, чем длительность коротких импульсов сигнала (логических нулей). Или, если рассматривать с точки зрения частоты, опрашивать приёмник нужно в 2 раза большей частотой (вспомним Найквиста и Котельникова). Напишем скетч, реализующий вариант со стробированием.
Скетч для чтения пакета от ИК пульта методом стробирования
Поэкспериментируем с данным скетчем и ИК приёмником. Загрузим скетч в память Ардуино. Запустим последовательный монитор. Нажмём на пульте несколько раз одну и ту же кнопку и посмотрим, что мы увидим в мониторе.
Это похоже на пакет, который мы видели на осциллограмме, но всё-таки есть ошибки. Между одинаковыми пакетами также встречаются различия, которых быть не должно. Можно улучшить результат, если увеличить частоту стробирования, чтобы точнее определять биты пакета. Для безошибочного приёма необходимо чтобы строб попадал ближе к середине импульса. Но мы не можем гарантировать это, т.к. импульсы могут распространяться с варьирующимися задержками; Arduio выполняет код также не моментально, каждый цикл требует малого, но всё же времени, поэтому с каждым битом мы немного будем уходить от исходной позиции посередине импульса и рано или поздно «промахнёмся» (определим бит с ошибкой).
Перепишем скетч, используя метеод детекции фронтов.
Скетч для чтения пакета от ИК пульта методом детекции фронтов
Здесь мы ввели таймаут, чтобы выходить из цикла в любом случае, даже если фронт импульса не пришёл. Это гарантирует, что мы не окажемся в бесконечном цикле ожидания.
Загрузим скетч, запустим монитор, нажмём несколько раз ту же кнопку пульта.
Результат, как видно, более стабильный.
Скачать вложения:
- Datasheet на компаратор LM393(150 Скачиваний)
- Техническое описание ИК светодиода(106 Скачиваний)
- Техническое описание ИК фотодиода(78 Скачиваний)
Последнее изменениеПятница, 10 Январь 2020 17:46 Прочитано 3383 раз
СОДЕРЖАНИЕ ►
Оптический датчик препятствия (KY-032) — это один из самых распространенных датчиков, который прекрасно подойдет роботу или машинке на Ардуино для объезда препятствий. Датчик очень прост по принципу своей работы и способу подключения к плате Arduino Uno. Рассмотрим устройство датчика, схему его подключения и рассмотрим несколько примеров программ для работы с avoid sensor arduino.
Характеристики датчика препятствия (KY-032)
Схема работы ИК датчика препятствий довольно простая. На модуле расположен инфракрасный светодиод с линзой, который постоянно включен и излучает узкий пучок ИК излучения. Детектором отраженного сигнала от препятствия служит фотодиод или фототранзистор. Также на печатной плате расположен светодиод для индикации и два подстроечных резистора для настройки чувствительности датчика ky-032.
Устройство излучает инфракрасный луч с частотой 38 кГц, который принимается приемником на плате. При приближении предмета к сенсору (необходимое расстояние регулируется потенциометром на модуле) на выходе платы «OUT» появляется низкий уровень напряжения и включается встроенный светодиод. Дальность срабатывания (чувствительность) датчика препятствия регулируется от 2 до 40 сантиметров.
Подключение датчика препятствия к Arduino
Для занятия нам понадобятся следующие детали:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- датчик препятствия KY-032;
- беспаечная макетная плата;
- светодиод и резистор;
- провода «папа-мама», «папа-папа».

Для подключения датчика обнаружения препятствий к Arduino имеется три или четыре контакта. Два контакта на модуле KY-032 служат для питания от 5V (схему подключения датчика смотри на картинке выше). Еще два контакта формируют импульсы для платы Arduino Mega или Arduino Uno. Для примера работы рассмотрим скетч, который будет включать светодиод при появлении препятствия.
Счетч для датчика препятствий (KY-032)
#define avoidPin A1 // задаем имя для порта с датчиком#define ledPin 13 // задаем имя для порта со светодиодомint avoid; voidsetup() { Serial.begin(9600); // инициализация монитора портаpinMode(avoidPin, INPUT); pinMode(ledPin, OUTPUT); } voidloop() { avoid = digitalRead(avoidPin); // получаем данные с датчика препятствийSerial.print("Avoid Sensor - "); // выводим данные с датчика на мониторSerial.println(avoid); if (avoid == HIGH) digitalWrite(ledPin, HIGH); elsedigitalWrite(ledPin, LOW); }
Пояснения к коду:
- для приема сигнала с датчика KY-032 используется порт A1, который можно поменять в программе на любой порт общего назначения;
- датчик отправляет сигнал «логическая единица» при появлении препятствия.
Для создания шагающего робота или автономной машинки на Ардуино сенсор KY-032 отлично подойдет начинающему программисту. Датчик препятствия более прост в настройке и подключении к микроконтроллеру, в отличии от УЗ дальномера HC-SR04. При этом сенсор хорошо справляется с распознаванием объектов перед ним и может использоваться в машинках для объезда препятствий или езде по лабиринту.
Используемые источники:
- https://robotclass.ru/tutorials/arduino-proximity-sensor/
- https://soltau.ru/index.php/arduino/item/553-kak-podklyuchit-infrakrasnyj-sensor-k-arduino
- https://xn--18-6kcdusowgbt1a4b.xn--p1ai/%d0%b4%d0%b0%d1%82%d1%87%d0%b8%d0%ba-%d0%bf%d1%80%d0%b5%d0%bf%d1%8f%d1%82%d1%81%d1%82%d0%b2%d0%b8%d1%8f-%d0%b0%d1%80%d0%b4%d1%83%d0%b8%d0%bd%d0%be/
 Как подключить датчик освещённости BH1750 к Arduino
Как подключить датчик освещённости BH1750 к Arduino Arduino для начинающих. Урок 8. Подключение датчика движения (PIR). Отправка E-mail
Arduino для начинающих. Урок 8. Подключение датчика движения (PIR). Отправка E-mail Плата Arduino Uno R3: схема, описание, подключение устройств
Плата Arduino Uno R3: схема, описание, подключение устройств НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).
НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).