
- Цена: $25.50
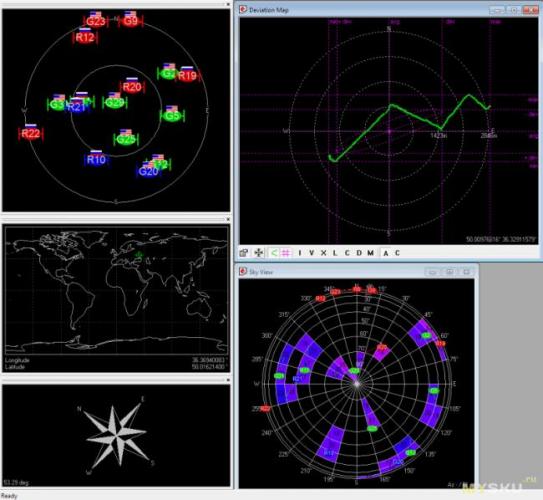
В процессе развития моего GPS-логгера, был получен новый модуль — GYGPSV5-NEO — с поддержкой GLONASS, причем, одновременно с GPS. Модуль построен на чипе NEO-M8N; говорят, что NEO-7 позволяют определять положение только по GPS или только по GLONASS, и нужно между ними переключаться — наш же модуль определяет одновременно. Посылка пришла в чёрном пакете с защитой от падений в виде нескольких слоев утеплителя:Фото упаковки

 В комплект также входит кабель, длиной 20см, вставляется он в разъём, пины которого продублированы на обратной стороне платы, что позволяет к ним подпаяться и не курочить ни кабель, ни разъемы (но нужно будет отодрать антенну):
В комплект также входит кабель, длиной 20см, вставляется он в разъём, пины которого продублированы на обратной стороне платы, что позволяет к ним подпаяться и не курочить ни кабель, ни разъемы (но нужно будет отодрать антенну): Размерами (33мм x 33.5мм) данный модуль превосходит прошлый GY-NEO6MV2, из этого обзора: На поверхности антенны наклеек нет, есть какие-то две прорези и не по кругу пропаенное соединение (пайка прерывается как раз со стороны прорезей, может, это какая-то хитрая китайская задумка?): Приклеена к обратной стороне платы толстым, порядка полтора миллиметра, двухсторонним скотчем, отрывается поворотов: Экран антенны крепится к плате не в четырёх, как в прошлом модуле, а в двух местах — отпаивать удобнее: На странице описания товара имеется принципиальная схема, «на борту» имеется микросхема с маркировкой «A983 2420» — это цифровой компас, его выводам SDA и SCL соответствует отдельная пара клемм на разъёме и проводков белого и синего цветов:
Размерами (33мм x 33.5мм) данный модуль превосходит прошлый GY-NEO6MV2, из этого обзора: На поверхности антенны наклеек нет, есть какие-то две прорези и не по кругу пропаенное соединение (пайка прерывается как раз со стороны прорезей, может, это какая-то хитрая китайская задумка?): Приклеена к обратной стороне платы толстым, порядка полтора миллиметра, двухсторонним скотчем, отрывается поворотов: Экран антенны крепится к плате не в четырёх, как в прошлом модуле, а в двух местах — отпаивать удобнее: На странице описания товара имеется принципиальная схема, «на борту» имеется микросхема с маркировкой «A983 2420» — это цифровой компас, его выводам SDA и SCL соответствует отдельная пара клемм на разъёме и проводков белого и синего цветов: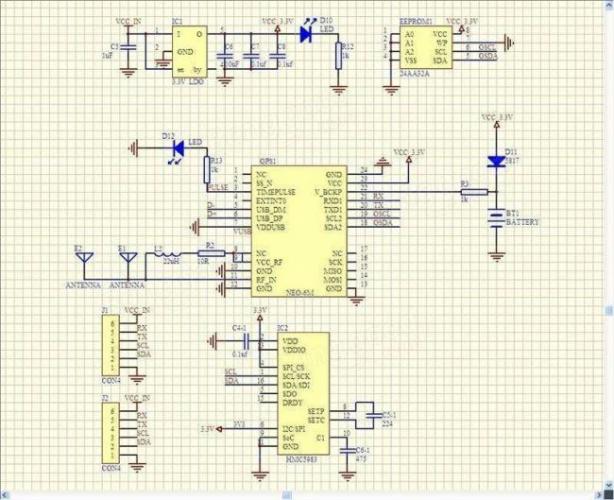

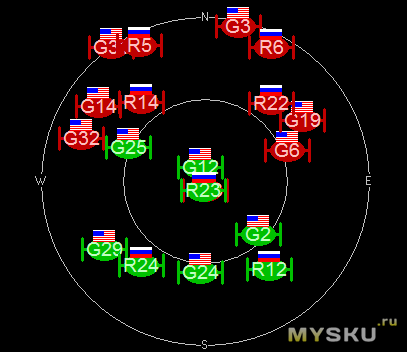

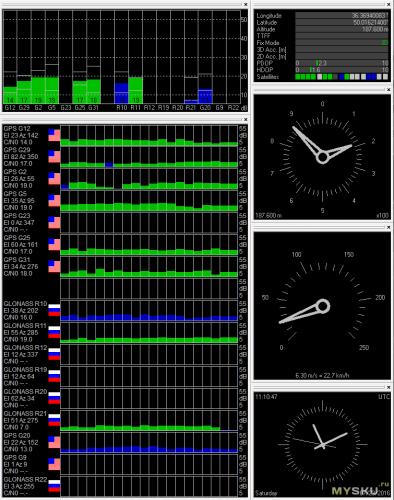
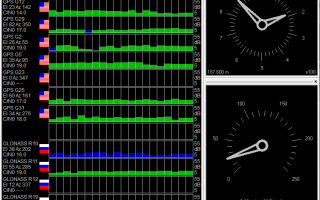
Возможно — я вдумчиво не смотрел. Когда выкладывал ссылку на видео — ставил целью показать сам процесс настройки (хотя в описании было написано что для квадрокоптера). В последнее время обленился, один фиг Config.txt мне не подходит, просто ставлю в PRT скорость UART порта 38600 и более ничего не настраиваю. Хотя вру. В ПОСЛЕДНЕЕ ВРЕМЯ у меня вообще МТК-шные модули. Буквально вчера поставил модуль от Козина на коптер. Если сегодня всё срастется — буду сначала калибровать в поле (компас ведь тоже поменялся) и тестить спутниковое позиционирование и работу компаса. Долго тупил что модуль не работает с АРМ, пока не дошло, что на тестовый контроллер, лежащий на подоконнике — я гружу версию 3.2 (попытка загрузить предыдущую версию вызывает в МП ошибку), а там поддержка NMEA отключена. Когда дошло — по-быстренькому всё исправил и все заработало. Заодно сравнил самопальный модуль с модулем от Козина. Результаты — похожие. Керамическая антенна — одинаковая (так совпало), сами чипы немного разные. И модуль от Козина на удивление смог «вытащить» немного спутников сквозь ж/б перекрытия. То есть на его модуле было где-то на 2-3 спутника больше (на моем было 9-10, на модуле Козина 10-12).
Описание (что хотим получить): Коммуникация GPS — МК по протоколу UART, Управление приемником по веб интерфейсу. Автономная запись сырых данных в формате UBX на SD для постобработки. Передача сырых данных по WiFi для обработки в режиме реального времени в ПО RTKLIB. Радиомодем LoRa (подключение к МК по SPI) В перспективе замена gps модуля m8t на ublox ZED-F9P. Аппаратная часть: 1. GPS — UBLOX NEO M8TZED-F9P 2. МК — ESP8266 (NodeMcu) в перспективеESP32 3. Антенна — GNSS-306 (no-name aliexpress)) 4. SD — (протокол SPI) 5. Остальное особого значения не имеет сейчас) Программная часть будет дальше…(ред.) По программной части — укажу ссылки на готовые примеры:1. Коммуникация (прием/передача сырых данных) GPS <—> Контроллер — WiFiTelnetToSerial 2. Web интерфейс (управление состоянием GPS приемника) — CaptivePortalAdvancedНастройки для GPS можно взять здесь либо на сайте EMLIDЭтого достаточно для работы приемника в связке с RTKLIB.(ред.) Разработка ПО для приемника m8t-tcp-receiver Графический интерфейс m8t-tcp-reciver-gui-jsСсылка на ресурс(ред.) Варинт подключения ZED F9P (ESP32 DEVIKIT V1)
Фотографии прототипа:
 Описание (что хотим получить): Коммуникация GPS — МК по протоколу UART, Управление приемником по веб интерфейсу. Автономная запись сырых данных в формате UBX на SD для постобработки. Передача сырых данных по WiFi для обработки в режиме реального времени в ПО RTKLIB. Радиомодем LoRa (подключение к МК по SPI) В перспективе замена gps модуля m8t на ublox ZED-F9P. Аппаратная часть: 1. GPS — UBLOX
Описание (что хотим получить): Коммуникация GPS — МК по протоколу UART, Управление приемником по веб интерфейсу. Автономная запись сырых данных в формате UBX на SD для постобработки. Передача сырых данных по WiFi для обработки в режиме реального времени в ПО RTKLIB. Радиомодем LoRa (подключение к МК по SPI) В перспективе замена gps модуля m8t на ublox ZED-F9P. Аппаратная часть: 1. GPS — UBLOX  Фотографии прототипа:
Фотографии прототипа:

Используемые источники:
- https://mysku.ru/blog/china-stores/42223.html
- https://apmcopter.ru/forum/threads/gps-ublox-m8n-i-vsjo-chto-s-nim-svjazano.119/page-2
- https://geodesist.ru/threads/sborka-gps-priemnika-na-baze-ublox-m8t.75499/
 Китайский GPS трекер (возможности и настройка) В
Китайский GPS трекер (возможности и настройка) В  NiXIE
NiXIE Wintel CX-W8, что он из себя представляет, и что с ним можно делать.
Wintel CX-W8, что он из себя представляет, и что с ним можно делать. Используем телефон вместо GSM-модуля для Ардуино
Используем телефон вместо GSM-модуля для Ардуино