Шаговые двигатели – один из важнейших узлов ЧПУ оборудования. Поэтому при выборе сборке ЧПУ станка, 3D принтера или же лазерного гравера важно правильно рассчитать и выбрать необходимую модель ШД Nema 17. На этой странице приведены характеристики и размеры самых популярных двигателей: 17hs2408, 17hs3401, 17hs3410, 17hs3430, 17hs3630, 17hs3616, 17hs4401, 17hs4402, 17hs4602, 17hs4630, 17hs8401, 17hs8402, 17hs8403, 17hs8630.
Это полезные данные при сборке большинства оборудования. Добавьте страницу в избранное или сохраните ссылку в соц.сети.
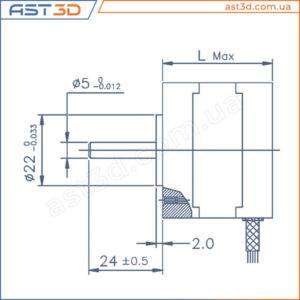
Nema 17 – Размеры (чертеж)
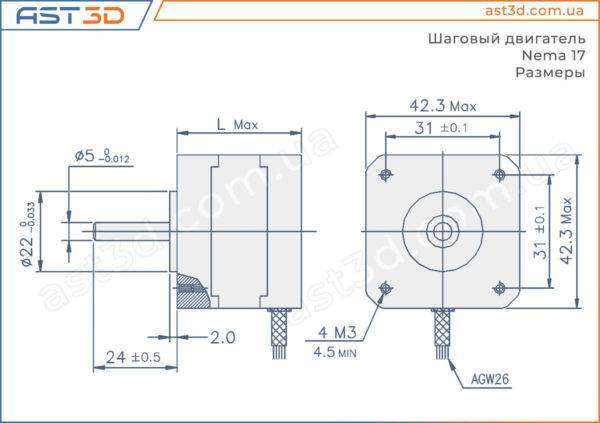 (нажмите для увеличения)
(нажмите для увеличения)
Характеристики Nema 17 (таблица)
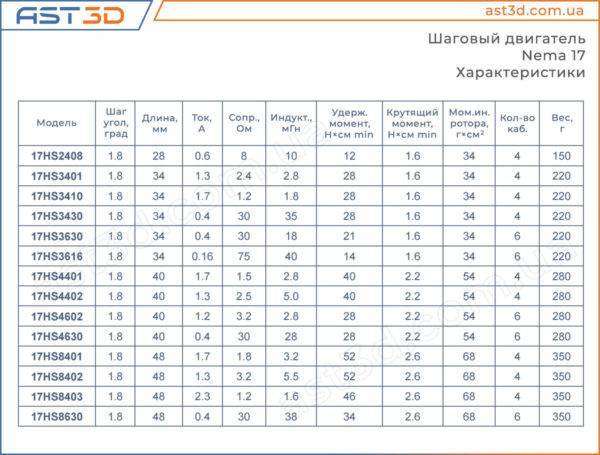 (нажмите для увеличения)
(нажмите для увеличения)
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Купить шаговый двигатель Nema 17 на сайте AST3D
– для ЧПУ станкаhttps://ast3d.com.ua/catalog/komplektuyushhie/komplektuyushhie-chpu-frezernyh-stankov/shagovye-dvigateli
– для 3D принтераhttps://ast3d.com.ua/catalog/komplektuyushhie/komplektuyushhie-3d-printerov-i-ustrojstv/shagovye-dvigateli-drajvera-shd
- Цена: $8.89
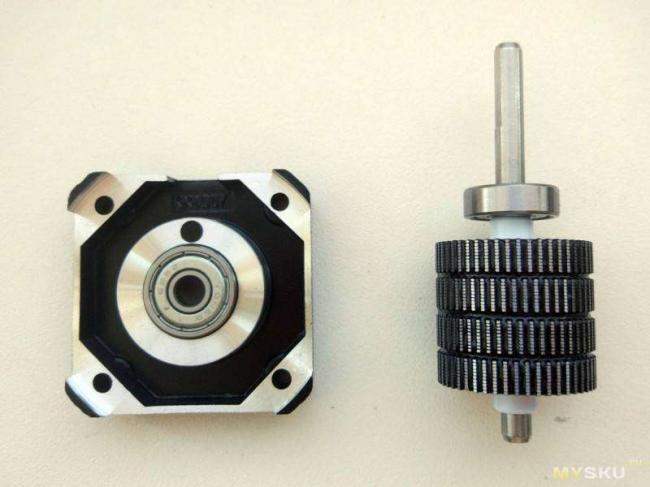
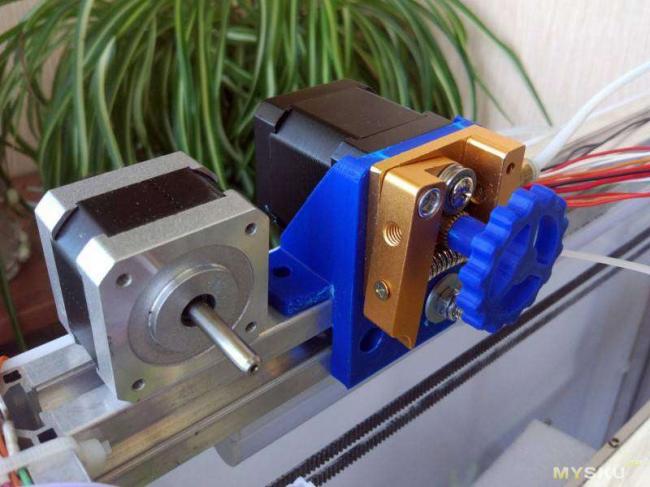
Добрый день! Некоторое время назад самостоятельно начал собирать 3D принтер HyperCube. Заказал набор самых дешевых шаговых двигателей nemo 17, как позже выяснилось, что экономить не стоило, хотя бы на двигателе, который стоит на подаче экструдера. При печати температура двигателя превышала 60 градусов, собственно из-за чего и пришлось заказать более мощный двигатель. Шаговый мотор NEMA 17 — это биполярный двигатель с высоким крутящим моментом. Может поворачиваться на заданное число шагов. За один шаг совершает оборот на 1,8°, соответственно полный оборот на 360° осуществляет за 200 шагов. Биполярный двигатель имеет две обмотки, по одной в каждой фазе, которая для изменения направления магнитного поля переполюсовывается драйвером. Соответственно, от мотора отходят четыре провода.Упаковка:


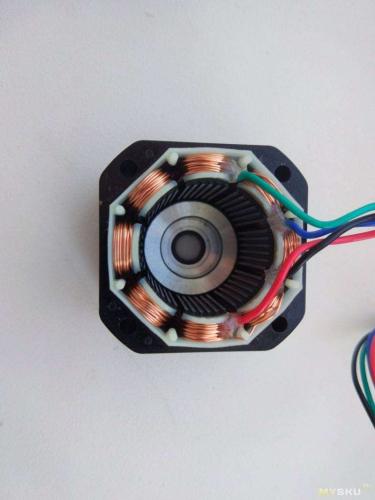
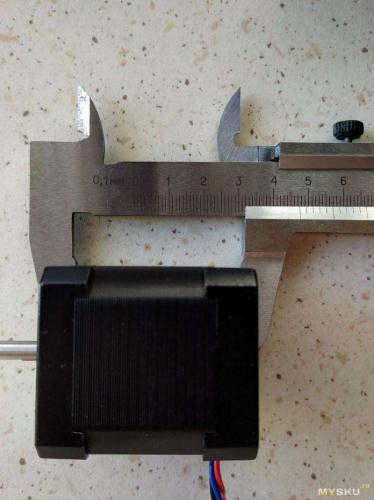
Внешний/внутренний вид:
Этот двигатель координатно от других шаговых двигателей типа nemo 17 ничем не отличается. На фотографии виден конструктивный просчет в виде отверстия для проводов, через которое может попасть грязь внутрь двигателя. Это не критично, я закрыл отверстие с помощью изоленты.





 Тахометр, счетчик моточасов для лодочного мотора
Тахометр, счетчик моточасов для лодочного мотораДвигатель старый/новый:
Итог:
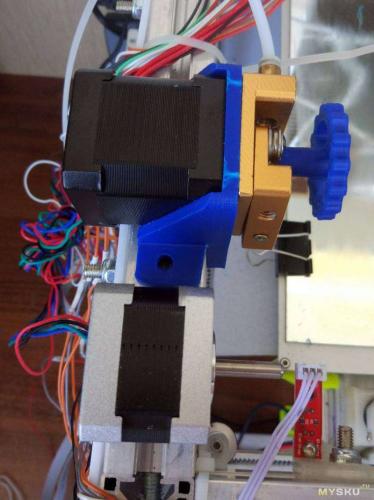
Двигатель работает стабильно, выполнен качественно. Единственным минусом считаю, что не продуман вывод проводов, через него виднеется обмотка, на которую может легко попасть различный мусор, что повлияет на работу двигателя. Я решил эту проблему синей изолентой. Распечатал крепление, подключил в плате RAMPS и все заработало как надо. Конечно можно было переделать RAMPS на 24 вольта, но я не думаю, что эффект будет более результативный. Результатом установки нового двигателя полностью доволен, параметры шага подачи экструдера (95) в прошивке менять не пришлось. К покупке рекомендую. Если есть вопросы, обращайтесь, постараюсь на них ответить. Всем спасибо за внимание! Если обзор понравился, не забываем нажать «Обзор понравился»!) Всем добра!
Вам уже приходилось делать выбор между разными шаговыми двигателями для реализации своих амбициозных проектов? Зачастую у новичков существует миф, что NEMA 17 слабые и ни на что не годные шаговики, а для 3D-принтера обязательно нужен как минимум NEMA 23, а то и дороже. Давайте попробуем разобраться какие критерии всё-таки должны учитываться при правильном выборе шагового двигателя. Если на них не обращать внимание, а просто надеяться на свой инстинкт потребителя, то в результате можно сильно разочароваться. К примеру можно купить как бы обычный двигатель NEMA 17 и стандартный драйвер рекомендуемый под него, но получить постоянно перегревающуюся микросхему драйвера и невозможность нормальной работы проекта.
Посмотрим для начала какой выбор нам предоставляют самые доступные поставщики шаговых двигателей.
Двигатели NEMA 16 представлены такими моделями
| Модель | Угол шага | Количество проводов | Номинальныйток фазы, А | Сопротивление фазы, Ом | Индуктивностьфазы, мГн | Инерцияротора,г·см2 | Удерживающиймомент, Н·см | Крутящиймомент,Н·см | |
| 39HS20044 | 1,8 | 4 | 0,42 | 18 | 12 | 12 | 8 | 0,5 | 20 |
| 39HS26064 | 1,8 | 4 | 0,6 | 9 | 10 | 14 | 14 | 0,8 | 26 |
| 39HS34064 | 1,8 | 4 | 0,6 | 12 | 13 | 19 | 18 | 1 | 34 |
| 39HS34124 | 1,8 | 4 | 1,2 | 3,2 | 3 | 19 | 16 | 1 | 34 |
| 39HS34046 | 1,8 | 6 | 0,4 | 30 | 14 | 19 | 12 | 1 | 34 |
| 39HS40064 | 1,8 | 4 | 0,6 | 12 | 20 | 24 | 24 | 1,2 | 40 |
| 39HS40124 | 1,8 | 4 | 1,2 | 3,8 | 6,5 | 24 | 24 | 1,2 | 40 |
| 39HS40046 | 1,8 | 6 | 0,4 | 30 | 22 | 24 | 18 | 1,2 | 40 |
Диаметр вала у NEMA 16 — 5 мм
В формфакторе NEMA 17 нам доступны такие двигатели
| Модель | |||||||||
| 1,8 | 28 | 0,6 | 8 | 10 | 12 | 1,6 | 34 | 4 | 150 |
| 1,8 | 34 | 1,3 | 2,4 | 2,8 | 28 | 1,6 | 34 | 4 | 220 |
| 1,8 | 34 | 1,7 | 1,2 | 1,8 | 28 | 1,6 | 34 | 4 | 220 |
| 1,8 | 34 | 0,4 | 30 | 35 | 28 | 1,6 | 34 | 4 | 220 |
| 1,8 | 34 | 0,4 | 30 | 18 | 21 | 1,6 | 34 | 6 | 220 |
| 1,8 | 34 | 0,16 | 75 | 40 | 14 | 1,6 | 34 | 6 | 220 |
| 1,8 | 40 | 1,7 | 1,5 | 2,8 | 40 | 2,2 | 54 | 4 | 280 |
| 1,8 | 40 | 1,3 | 2,5 | 5 | 40 | 2,2 | 54 | 4 | 280 |
| 1,8 | 40 | 1,2 | 3,2 | 2,8 | 28 | 2,2 | 54 | 6 | 280 |
| 1,8 | 40 | 0,4 | 30 | 28 | 28 | 2,2 | 54 | 6 | 280 |
| 1,8 | 48 | 1,8 | 1,8 | 3,2 | 52 | 2,6 | 68 | 4 | 400 |
| 1,8 | 48 | 1,3 | 3,2 | 5,5 | 52 | 2,6 | 68 | 4 | 400 |
| 1,8 | 48 | 2,3 | 1,2 | 1,6 | 46 | 2,6 | 68 | 4 | 400 |
| 1,8 | 48 | 0,4 | 30 | 38 | 34 | 2,6 | 68 | 6 | 400 |
Точность шага без нагрузки ±5 %
Диаметр вала 5 мм
Следующий формфактор NEMA 23 представлен такими моделями
| Модель | ||||||||||||
| 57HS4128A4 | 1,8 | 41 | 6,35 | 21 | 2,8 | 0,7 | 1,4 | 0,55 | 2,5 | 150 | 4 | 0,55 |
| 57HS5128A4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,6 |
| 57HS5128B4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,65 |
| 57HS5630A4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630A4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS7630A4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630A4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS8430A4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430A4D8 | 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430B4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 | |
| 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 | |
| 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 | |
| 1,8 | 112 | 8 | 21 | 4,2 | 1,4 | 1,8 | 3 | 12 | 800 | 4 | 1,8 |
У NEMA 23 диаметр вала составляет 6,35 мм или 8 мм
Варианты подключения двухфазных шаговых двигателей
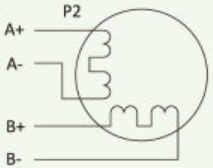
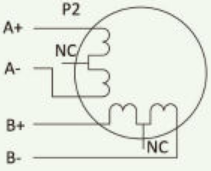
Теперь разберёмся зачем шаговому двигателю нужно больше чем четыре вывода. Для этого рассмотрим различные варианты подключения двухфазных шаговиков
 Как разобрать кофемолку
Как разобрать кофемолку1) Тут мы видим самый простой вариант с 4-проводным шаговым двигателем. Здесь главное правильно соединить выводы А+ двигателя с А+ драйвера, А- двигателя с А- драйвера и так далее.
2) Дальше идёт 8 — проводный двигатель. Для него характерны два варианта подключения.
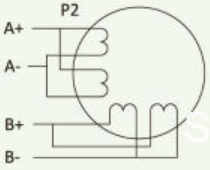
Это параллельное подключение обмоток шаговика. При таком подключении уменьшается суммарная индуктивность обмоток, что позволяет увеличить максимальную скорость вращения вала. Величина индуктивности обмоток влияет на частотные характеристики двигателя, особенно на высоких частотах управляющих сигналов. К такому подключению стоит стремиться, если вам действительно важна высокая скорость работы шаговика и критична точность и КПД на высоких оборотах.
А это последовательное соединение. При таком соединении двигатель будет вести себя как обычный 4-проводный.
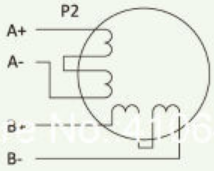
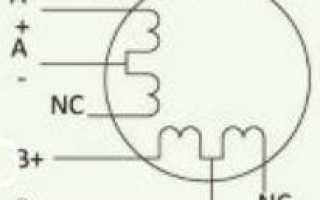
3) Теперь, когда мы уже не так боимся множества выводов на шаговиках, посмотрим, как подключать 6-выводный двигатель.

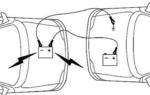 Как правильно прикуривать аккумулятор одного автомобиля от другого: две пошаговые инструкции
Как правильно прикуривать аккумулятор одного автомобиля от другого: две пошаговые инструкцииПредставленное подключение позволяет уменьшить индуктивность и этим повысить качество работы двигателя на высоких частотах (оборотах). Но при этом понижается КПД двигателя и его сила, повышается ток управления. Я бы советовал такой вариант включения только для временных скоростных операций, не требующих частого торможения и разгона, например во время возврата каретки 3D-принтера. При этом необходим механизм автоматического переключения режимов работы двигателя с полнообмоточного на полуобмоточный.
И второй вариант включения 6-проводного шагового двигателя следующий
Средние выводы каждой обмотки просто не задействуются и шаговик работает в точности как 4-проводный работяга.
Рассчетное определение необходимого момента шагового двигателя
Такой параметр как «момент» у двигателя характеризует его силу вращения. Он показывает, какой максимальной силе противодействия, приложенной на определённом расстоянии от своей оси двигатель способен противостоять.
Момент определяется по формуле M=F·R,
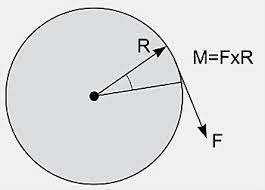 где М- момент силы в Н·м; F — сила противодействия в Ньютонах; R — расстояние точки приложения силы от центра оси двигателя, в метрах.
где М- момент силы в Н·м; F — сила противодействия в Ньютонах; R — расстояние точки приложения силы от центра оси двигателя, в метрах.
Что такое ньютон? Это величина, характеризующая взаимодействие физических тел и полей между собой. Например, чтобы приложить к подвешенной верёвке силу, равную 1 Ньютон, в земных условиях необходимо повесить на неё гирю весом 1/9,81 = 0,102 кг.
А при диаметре вала двигателя 5 мм и крутящем моменте двигателя в 1Н
1Н·м = 0,102 кг · 1м = 20,4 кг · 5 мм
Использование динамометра для определения момента, требуемого от двигателя.
Теория и рассчёты это всё очень полезно, но зачастую легче и быстрее будет отбросить теорию в сторону и взять и замерять действующие силы при помощи измерительного прибора. Динамометр как раз способен экспериментально показать нам практическую силу, противодействующую нашему двигателю в прямых плоскостях (момент силы вращения он не покажет). Я в продаже не встречал динамометров дешевле 500$, поэтому буду рассматривать использование только самодельного устройства. Это устройство состоит из шкалы и, зафиксированной с одной стороны шкалы, пружины.
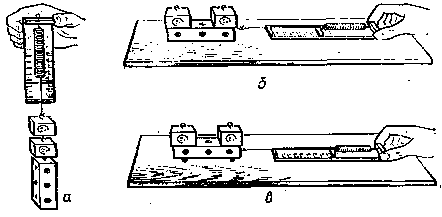
Градуировка и использование самодельного динамометра.
Градуировка — это нанесение делений на шкалу измерения динамометра. Для разных диапазонов измерения силы, будут необходимы разные по силе пружины и их длины, а так же длины планочки под шкалу. Допустим мы хотим своим динамометром измерять силу в пределах 1 … 10 Н. Для его градуировки необходимо как на рисунке а) подвесить к динамометру груз в 100 г и отметить на шкале риску с цифрой 1 Н, а затем подвесить груз в 1 кг и наметить риску в 10 Н. Теперь всю шкалу между этими двумя рисками нужно поделить на 9 равных отрезков и расставить цифры от 2 до 9 Н.
</span>
Джойстик двухосевой
Джойстик двухосевой с кнопкой. Имеет два аналоговых выхода для передачи данных о положении джойстика..
29.07грн.
Как освободить память Arduino?
Программируя контроллеры Arduino мы часто попадаем в ситуацию, когда компилятор ругается на нехватку..
Монтажный шилд для NodeMcu ESP8266
Монтажный модуль расширения для WiFi контроллера NodeMcu ESP8266Позволяет выполнять монтаж прое..
62.04грн.
Универсальная плата под микросхемы SOP20, SSOP20
Универсальная монтажная плата, позволяет проводить монтаж различных микросхем с поверхностным монтаж..
11.29грн.
ESP8266 ESP-01 WiFi модуль
Самый популярный формфактор WiFi модуля ESP8266.Напряжение питания 3,3 ВНапряжение логических у..
71.50грн.
Используемые источники:
- https://ast3d.com.ua/info/nema-17-razmery-i-harakteristiki
- https://mysku.ru/blog/aliexpress/65845.html
- http://geekmatic.in.ua/vibor_shagovogo_dvigatelia
 Тахометр для бензопилы. Как настроить карбюратор бензопилы с помощью тахометра
Тахометр для бензопилы. Как настроить карбюратор бензопилы с помощью тахометра Бензопила "Калибр": обзор, модели, характеристики и отзывы владельцев
Бензопила "Калибр": обзор, модели, характеристики и отзывы владельцев Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому.
Самодельный электрический актуатор. Как сделать линейный актуатор (линейный привод) самому.