- 24.10.18
- 8 894
ЭлектроприводМикроконтроллеры
 Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В частности, контакты со временем изнашиваются и приходят в негодность, появляется дребезг. Оптические энкодеры гораздо надежнее, но они дороже, многие из них боятся пыли, и они редко встречаются в таком виде, в котором их удобно было бы использовать в радиотехнике. Короче, когда я узнал о том, что шаговый двигатель можно использовать как энкодер, эта идея мне очень понравилась. Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь.
Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В частности, контакты со временем изнашиваются и приходят в негодность, появляется дребезг. Оптические энкодеры гораздо надежнее, но они дороже, многие из них боятся пыли, и они редко встречаются в таком виде, в котором их удобно было бы использовать в радиотехнике. Короче, когда я узнал о том, что шаговый двигатель можно использовать как энкодер, эта идея мне очень понравилась. Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь. ![]()
↑ Шаговый двигатель и схема
В качестве энкодера я решил попробовать миниатюрный безымянный шаговик из компьютерного дисковода 5.25 дюйма. Я разобрал несколько дисководов, везде двигатели были разные. Встречались на шлейфе, встречались с косой цветных проводов. На шлейфе общий провод — крайний. Всё остальное находится прозвонкой. По сопротивлению понятно: с выхода на выход сопротивление вдвое больше, чем с выхода на общую точку. А можно даже не прозванивать. Если открутить четыре винта, внутри коммутационная плата, на ней видно, где общий провод.Исходная схема многократно встречается в Сети в вариациях. Я оттолкнулся от статьи Thomas (OZ2CPU).Рис. 1 Преобразователь сигналов шагового двигателя в квадратурный кодУ неё есть достоинства, но есть и недостатки, об этом далее. Собрал пробный вариант в виде макета, и понял, что ничего не понял Для начала хотелось бы сразу видеть, в какую сторону происходит шаг. Схема выдавала квадратурный код, как и обычный энкодер. Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».Разработал и протестировал вот такую схему:Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только меценатам и полноправным членам сообщества. Читай условия доступа!Кстати, эту схему на логике можно использовать и для обычного энкодера, я её и отрабатывал на нём.Для сборки понадобятся 8 элементов «2И-НЕ», я использовал два чипа 74HC00.Элемент U2A, диод, конденсатор и U2B создают короткий импульс в момент положительного фронта. Элемент U6D, U4D и U2D — мультиплексор, который пересылает этот испульс либо на один, либо на другой светодиод.Рис. 3 Диаграмма квадратурного кодаРазумеется, этот же функционал можно сделать на единственном микроконтроллере, но это далеко не для всех доступно и удобно. Всё-таки элементы 2И-НЕ можно найти где угодно, в т. ч. советские (74хх00, К155ЛА3, К555ЛА3).Последние два инвертора (U5D и U3D) можно выкинуть, ведь ничто нам не мешает подключить светодиоды не к земле, а к плюсу питания. Если крепко пошевелить мозгом, схему можно было бы ещё упростить, но эту задачу оставляем на будущее.Печатки нет, поскольку всё собиралось только на макетке.
Я разобрал несколько дисководов, везде двигатели были разные. Встречались на шлейфе, встречались с косой цветных проводов. На шлейфе общий провод — крайний. Всё остальное находится прозвонкой. По сопротивлению понятно: с выхода на выход сопротивление вдвое больше, чем с выхода на общую точку. А можно даже не прозванивать. Если открутить четыре винта, внутри коммутационная плата, на ней видно, где общий провод.Исходная схема многократно встречается в Сети в вариациях. Я оттолкнулся от статьи Thomas (OZ2CPU).Рис. 1 Преобразователь сигналов шагового двигателя в квадратурный кодУ неё есть достоинства, но есть и недостатки, об этом далее. Собрал пробный вариант в виде макета, и понял, что ничего не понял Для начала хотелось бы сразу видеть, в какую сторону происходит шаг. Схема выдавала квадратурный код, как и обычный энкодер. Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».Разработал и протестировал вот такую схему:Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только меценатам и полноправным членам сообщества. Читай условия доступа!Кстати, эту схему на логике можно использовать и для обычного энкодера, я её и отрабатывал на нём.Для сборки понадобятся 8 элементов «2И-НЕ», я использовал два чипа 74HC00.Элемент U2A, диод, конденсатор и U2B создают короткий импульс в момент положительного фронта. Элемент U6D, U4D и U2D — мультиплексор, который пересылает этот испульс либо на один, либо на другой светодиод.Рис. 3 Диаграмма квадратурного кодаРазумеется, этот же функционал можно сделать на единственном микроконтроллере, но это далеко не для всех доступно и удобно. Всё-таки элементы 2И-НЕ можно найти где угодно, в т. ч. советские (74хх00, К155ЛА3, К555ЛА3).Последние два инвертора (U5D и U3D) можно выкинуть, ведь ничто нам не мешает подключить светодиоды не к земле, а к плюсу питания. Если крепко пошевелить мозгом, схему можно было бы ещё упростить, но эту задачу оставляем на будущее.Печатки нет, поскольку всё собиралось только на макетке.
↑ Недостатки схемы и их преодоление
Собираем всё это, и что же мы видим? Схема далеко не всегда работает должным образом. Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только меценатам и полноправным членам сообщества. Читай условия доступа!
↑ Видео в работе
Жалко, что видео не передает тактильные ощущения на валу!
↑ Итого
В целом работа энкодера меня устраивает. Крутить такую «ручку громкости» необычно приятно.Работа над устройством будет продолжена.Спасибо за внимание!
- Цена: $3.18
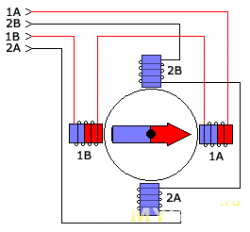
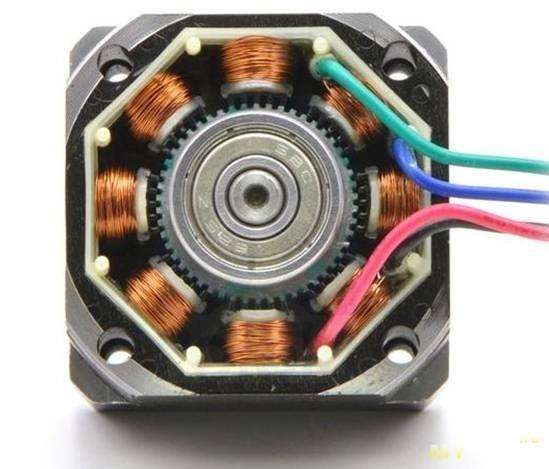
Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался. Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера. В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл. Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят. Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов. Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство — несколько катушек, притягивающих сердечник в заданных положениях.
Что такое энкодер вращения
Принцип работы
Работу энкодера вращения проще всего объяснить на примере оптического энкодера. Представьте себе вал электродвигателя, на котором закреплен диск с прорезями. С одной стороны диска расположен светоизлучающий элемент, луч света проходит через прорези и регистрируется фотоэлементом, расположенным с другой стороны (устройство, состоящее из спаренных светоизлучающего и принимающего элементов, называется фотопрерыватель). При вращении диска луч прерывается, в результате чего на выходе фотоэлемента мы получим меандр — сигнал прямоугольный формы. И частота меандра будет пропорциональна скорости вращения диска. Таким образом можно судить о скорости вращения вала электродвигателя.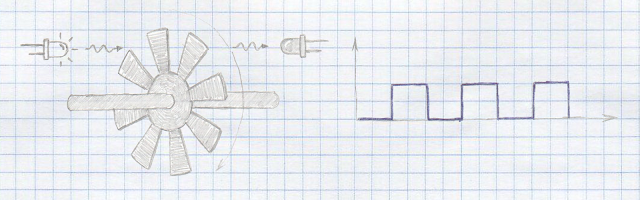 Однако работающее по описанному принципу устройство не способно определить направление вращения. Чтобы исправить это добавим в него второй фотопрерыватель и расположим с некоторым смещением относительно первого. В зависимости от направления вращения диска сигнал на выходе первого фотопрерывателя будет меняться раньше или позже чем сигнал на выходе второго. А значит, анализируя как меняются эти два сигнала, мы можем определить направление вращения.
Однако работающее по описанному принципу устройство не способно определить направление вращения. Чтобы исправить это добавим в него второй фотопрерыватель и расположим с некоторым смещением относительно первого. В зависимости от направления вращения диска сигнал на выходе первого фотопрерывателя будет меняться раньше или позже чем сигнал на выходе второго. А значит, анализируя как меняются эти два сигнала, мы можем определить направление вращения.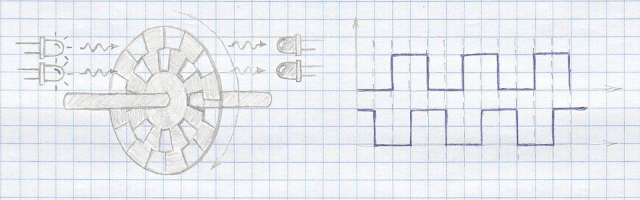 На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными. На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:
На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными. На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:
Абсолютные и инкрементные энкодеры
Приведенный выше пример оптического энкодера вращения генерирует на выходе импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Такие энкодеры называют инкрементными или накапливающими. Сразу же после включения инкрементного энкодера положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта инкрементные энкодеры могут иметь нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам также относится то, что невозможно определить пропуск импульсов от энкодера по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала до тех пор, пока не будет пройдена нуль-метка. Этих недостатков лишены абсолютные энкодеры. Они выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота. Как и в приведенной выше схеме инкрементного энкодера, абсолютный оптический энкодер содержит светоизлучающий и принимающий элементы. Существенное отличие в используемом диске: он имеет прозрачные и непрозрачные участки на нескольких радиусах. Световые лучи, проходя через диск, засвечивают те или иные участки фоточувствительного элемента, который в свою очередь формирует на выходе соответствующие сигналы, уникальные для каждого положения диска. Для кодирования углового положения абсолютные энкодеры используют диски с двоичными кодами и кодами Грея. Двоичный код удобен тем, что не требует дополнительных преобразований. В целом же использование кода Грея предпочтительнее т.к. он более устойчив к ошибкам чтения за счет того, что каждое следующее значение отличается от предыдущего только в одном разряде. При этом вероятность считывания совершенно неверного значения полностью исключена. Более подробно о коде Грея можно почитать в Википедии. На следующем изображении приведены примеры дисков для инкрементного квадратурного и абсолютного энкодеров.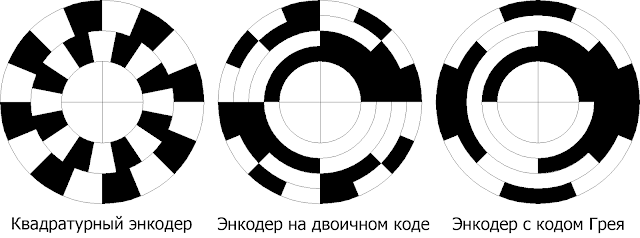 Этот пример наглядно иллюстрирует принцип кодирования углового положения на диске абсолютного энкодера. Для каждого положения вала формируется свой уникальный код. В данном случае для кодирования 16 положений потребовалось 4 концентрических дорожки. При увеличении разрешения абсолютного энкодера возрастает число дорожек и разрядность считываемого значения. Поэтому наряду с параллельным интерфейсом в абсолютных энкодерах широко применяются последовательные интерфейсы, такие как Profibus, CANopen, SSI, BiSS, ISI, Profinet, PWM, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, EtherCAT. Также существуют энкодеры, возвращающие значение углового положения в виде аналогового сигнала. Абсолютные энкодеры могут быть однооборотными и многооборотными. Если однооборотные способны только выдавать значение угла поворота, то многооборотные позволяют также определять количество оборотов. Это возможно за счет наличия в их составе редуктора и дополнительного диска, который изменяет свое положение при каждом полном обороте вала энкодера.
Этот пример наглядно иллюстрирует принцип кодирования углового положения на диске абсолютного энкодера. Для каждого положения вала формируется свой уникальный код. В данном случае для кодирования 16 положений потребовалось 4 концентрических дорожки. При увеличении разрешения абсолютного энкодера возрастает число дорожек и разрядность считываемого значения. Поэтому наряду с параллельным интерфейсом в абсолютных энкодерах широко применяются последовательные интерфейсы, такие как Profibus, CANopen, SSI, BiSS, ISI, Profinet, PWM, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, EtherCAT. Также существуют энкодеры, возвращающие значение углового положения в виде аналогового сигнала. Абсолютные энкодеры могут быть однооборотными и многооборотными. Если однооборотные способны только выдавать значение угла поворота, то многооборотные позволяют также определять количество оборотов. Это возможно за счет наличия в их составе редуктора и дополнительного диска, который изменяет свое положение при каждом полном обороте вала энкодера.
Подключение инкрементного энкодера к Ардуино
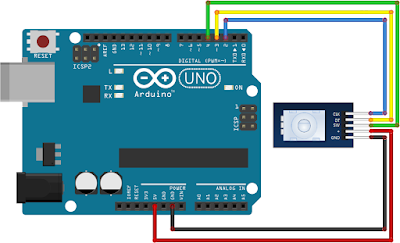
Теперь после небольшой теоретической части можно перейти к практике. Попробуем подключить к Ардуино инкрементный энкодер вращения. У меня в распоряжении имеется модуль KY-040 (вроде того, что изображен на фото в начале этой статьи), который представляет из себя энкодер с разрешением 20 шагов на оборот со встроенной кнопкой, распаянный на плату с подтягивающими резисторами. Это идеальный компонент для организации меню: вращение вала энкодера можно интерпретировать как перемещение курсора по элементам меню, а нажатие кнопки — выбор конкретного элемента. Позже я приведу пример создания такого меню, а сейчас разберемся с подключением энкодера к Ардуино.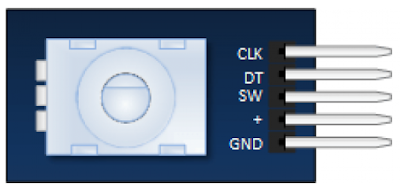 Модуль имеет 5 контактов, это:
Модуль имеет 5 контактов, это:
 Как подключить энкодер к частотному преобразователю. Схема
Как подключить энкодер к частотному преобразователю. Схема- CLK и DT — выводы энкодера, они подтянуты к линии питания резисторами 10кОм;
- SW — вывод кнопки, при нажатии вывод замыкается на землю;
- + и GND — линии питания и земли. Данный энкодер является механическим, питание для него не требуется, линии нужны для цепи с подтягивающими резисторами.
 Существует 2 способа работы с энкодером: с использованием прерываний и путем опроса выводов энкодера в теле программы. Первый способ требует четкий сигнал на выводах энкодера, без помех. Поскольку данный энкодер является механическим, сигнал на его выходах искажен дребезгом контактов и не может быть использован для генерации прерываний (по крайней мере без дополнительных средств для восстановления сигнала, о чем будет рассказано позже). Поэтому сейчас реализуем второй способ и бороться с дребезгом будем программно. Загрузим в Ардуино нижеприведенный код, ссылка для скачивания.
Существует 2 способа работы с энкодером: с использованием прерываний и путем опроса выводов энкодера в теле программы. Первый способ требует четкий сигнал на выводах энкодера, без помех. Поскольку данный энкодер является механическим, сигнал на его выходах искажен дребезгом контактов и не может быть использован для генерации прерываний (по крайней мере без дополнительных средств для восстановления сигнала, о чем будет рассказано позже). Поэтому сейчас реализуем второй способ и бороться с дребезгом будем программно. Загрузим в Ардуино нижеприведенный код, ссылка для скачивания.
unsignedlong CurrentTime, LastTime; enum eEncoderState {eNone, eLeft, eRight, eButton}; uint8_t EncoderA, EncoderB, EncoderAPrev; int8_t counter; bool ButtonPrev; eEncoderState GetEncoderState() { eEncoderState Result = eNone; CurrentTime = millis(); if (CurrentTime - LastTime >= 5) { LastTime = CurrentTime; if (digitalRead(pin_Btn) == LOW ) { if (ButtonPrev) { Result = eButton; ButtonPrev = ; } } else { ButtonPrev = 1; EncoderA = digitalRead(pin_DT); EncoderB = digitalRead(pin_CLK); if ((!EncoderA) && (EncoderAPrev)) { if (EncoderB) Result = eRight; else Result = eLeft; } EncoderAPrev = EncoderA; } } return Result; } voidsetup() { pinMode(pin_DT, INPUT); pinMode(pin_CLK, INPUT); pinMode(pin_Btn, INPUT_PULLUP); Serial.begin(9600); counter = ; } voidloop() { switch (GetEncoderState()) { case eNone: return; case eLeft: { counter--; break; } case eRight: { counter++; break; } case eButton: { counter = ; break; } } Serial.println(counter); }
Для удобства работы код опроса энкодера помещен в отдельную функцию. В таком виде я использую ее в большинстве проектов с энкодером, достаточно скопировать функцию с переменными в новый скетч и в цикле опрашивать состояние энкодера. Подавление дребезга реализовано за счет добавления в функцию условия, которое обеспечивает опрос энкодера не чаще 1 раза в 5мс. Подобный код можно увидеть на различных сайтах, и везде говорится что вывод CLK — это сигнал A, а вывод DT — это B. Почему-то на моих энкодерах это не так и сигналы поменяны местами. Этот момент учтен в функции при чтении значений с контактов. И если вдруг у Вас окажется, что при вращении вала энкодера по часовой стрелке значение переменной counter будет уменьшаться, то замените в функции строки чтения значений с выводов pin_CLK и pin_DT на следующие:
EncoderA = digitalRead(pin_CLK); EncoderB = digitalRead(pin_DT);
Итак, прошиваем код в Ардуино, запускаем монитор порта и вращаем ручку энкодера. Должно получиться что-то вроде этого: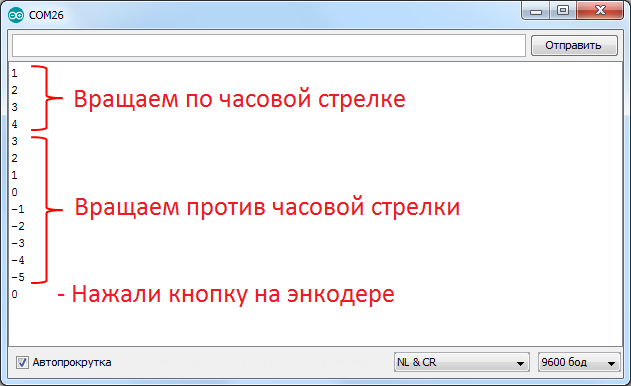 Но такой результат будет при не слишком быстром вращении, все-таки работаем с дешевым энкодером. В любом случае этого вполне достаточно для многих проектов на Ардуино. В следующий раз попробуем избавиться от контактного дребезга и задействовать прерывания для подсчета импульсов энкодера.
Но такой результат будет при не слишком быстром вращении, все-таки работаем с дешевым энкодером. В любом случае этого вполне достаточно для многих проектов на Ардуино. В следующий раз попробуем избавиться от контактного дребезга и задействовать прерывания для подсчета импульсов энкодера.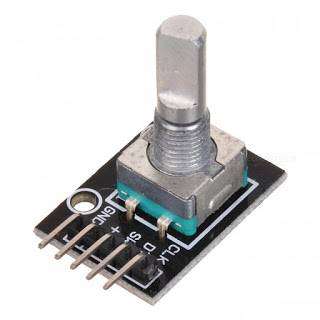 Используемые источники:
Используемые источники:
- https://datagor.ru/practice/elektroprivod/3041-enkoder-valkoder-iz-shagovogo-dvigatelja.html
- https://mysku.ru/blog/aliexpress/40426.html
- /2017/09/blog-post.html

 Принцип работы инкрементального энкодера
Принцип работы инкрементального энкодера Как называется крутилка громкости
Как называется крутилка громкости Болгарки компании Интерскол: плюсы и минусы, обзор моделей, характеристика
Болгарки компании Интерскол: плюсы и минусы, обзор моделей, характеристика Двигатели вращения поддона СВЧ TYJ50-8A7 в Санкт-Петербурге
Двигатели вращения поддона СВЧ TYJ50-8A7 в Санкт-Петербурге