Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
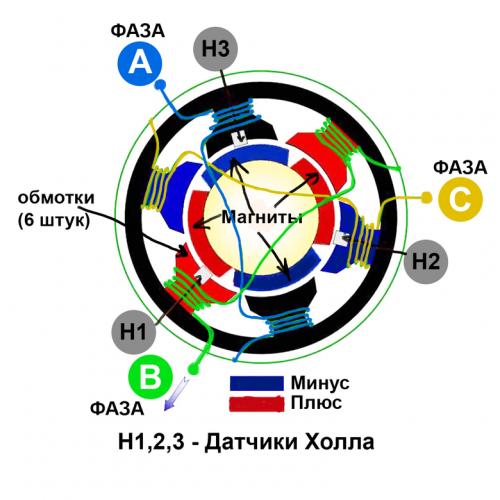
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
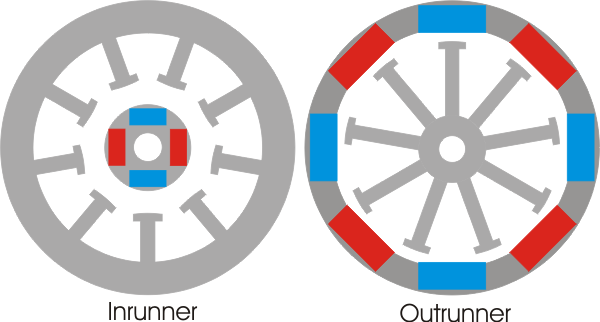
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
 Контроллер для электровелосипеда: схема, особенности подключения, советы при выборе
Контроллер для электровелосипеда: схема, особенности подключения, советы при выбореТак как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A+, A–, B+, B–, C+, C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
 Регулятор оборотов для бесколлекторных моторов Typhoon32 V2. Или работа над ошибками.
Регулятор оборотов для бесколлекторных моторов Typhoon32 V2. Или работа над ошибками.Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
//Пины ключей Н-мостов const int TRAplus = 8; const int TRAminus = 9; const int TRBplus = 10; const int TRBminus = 11; const int TRCplus = 12; const int TRCminus = 13; //датчики холла const int HallA = 3; const int HallB = 1; const int HallC = 0; boolean vala; boolean valb; boolean valc; boolean pvala; boolean pvalb; boolean pvalc; int pHall; int turns; void setup() { //Установка пинов ключей на выход pinMode(TRAplus, OUTPUT); pinMode(TRAminus, OUTPUT); pinMode(TRBplus, OUTPUT); pinMode(TRBminus, OUTPUT); pinMode(TRCplus, OUTPUT); pinMode(TRCminus, OUTPUT); //Вывод данных через серийный порт Serial.begin(9600); } void loop() { //Считываем датчики Холла и записываем их значение в val vala = digitalRead(HallA); valb = digitalRead(HallB); valc = digitalRead(HallC); //Счётчик оборотов колеса. Необходима доработка if(vala && !pvala) { if(pHall == HallC) // или HallB в обратную сторону turns++; pHall = HallA; } if(valb && !pvalb) { if(pHall == HallA) // или HallC в обратную сторону turns++; pHall = HallB; } if(valc && !pvalc) { if(pHall == HallB) // или HallA в обратную сторону turns++; pHall = HallC; } digitalWrite(TRAplus, (vala && !valb) ? HIGH : LOW); //если vala==HIGH и valb==LOW, тогда записать HIGH, иначе LOW digitalWrite(TRAminus, (valb && !vala) ? HIGH : LOW); digitalWrite(TRBplus, (valb && !valc) ? HIGH : LOW); digitalWrite(TRBminus, (valc && !valb) ? HIGH : LOW); digitalWrite(TRCplus, (valc && !vala) ? HIGH : LOW); digitalWrite(TRCminus, (vala && !valc) ? HIGH : LOW); pvala = vala; pvalb = valb; pvalc = valc; Serial.print(vala); Serial.print(valb); Serial.println(valc); //Serial.println(turns/3); }Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
 "Бесколлекторные двигатели" ЛикБез и проектирование — Паркфлаер
"Бесколлекторные двигатели" ЛикБез и проектирование — ПаркфлаерДля управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
- HIP4086
- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
Печатная плата
И готовый результат
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
//Пины ключей Н-мостов const int TAH = 8; //T — транзистор, А — фаза (синяя), Н — верхний ключ полумоста const int TAL = 9; //T — транзистор, А — фаза (синяя), L — нижний ключ полумоста const int TBH = 10; //T — транзистор, B — фаза (зелёная), H — верхний ключ полумоста const int TBL = 11; //T — транзистор, B — фаза (зелёная), L — нижний ключ полумоста const int TCH = 12; //T — транзистор, C — фаза (жёлтая), H — верхний ключ полумоста const int TCL = 13; //T — транзистор, C — фаза (жёлтая), L — нижний ключ полумоста //------------------------------------------------------------------------------------------------ //датчики холла int HallA = 3; //пин 1 (с прерыванием) int HallB = 1; //пин 2 (с прерыванием) int HallC = 0; //пин 3 (с прерыванием) //------------------------------------------------------------------------------------------------ volatile boolean vala; volatile boolean valb; volatile boolean valc; //------------------------------------------------------------------------------------------------ void setup() { //Установка пинов ключей на выход pinMode(TAH, OUTPUT); pinMode(TAL, OUTPUT); pinMode(TBH, OUTPUT); pinMode(TBL, OUTPUT); pinMode(TCH, OUTPUT); pinMode(TCL, OUTPUT); //Считывание датчиков Холла vala = digitalRead(HallA); valb = digitalRead(HallB); valc = digitalRead(HallC); //Аппаратное прерывание на пинах датчиков Холла attachInterrupt (digitalPinToInterrupt(HallA), changeA, CHANGE); attachInterrupt (digitalPinToInterrupt(HallB), changeB, CHANGE); attachInterrupt (digitalPinToInterrupt(HallC), changeC, CHANGE); //LOW вызывает прерывание, когда на порту LOW //CHANGE прерывание вызывается при смене значения на порту с LOW на HIGH, и наоборот //RISING прерывание вызывается только при смене значения на порту с LOW на HIGH //FALLING прерывание вызывается только при смене значения на порту с HIGH на LOW } void Fases() { digitalWrite(TAH, (vala && !valb) ? HIGH : LOW); digitalWrite(TAL, (valb && !vala) ? HIGH : LOW); digitalWrite(TBH, (valb && !valc) ? HIGH : LOW); digitalWrite(TBL, (valc && !valb) ? HIGH : LOW); digitalWrite(TCH, (valc && !vala) ? HIGH : LOW); digitalWrite(TCL, (vala && !valc) ? HIGH : LOW); void changeA() { vala = digitalRead(HallA); Fases(); } void changeB() { valb = digitalRead(HallB); Fases(); } void changeC() { valc = digitalRead(HallC); Fases(); } void loop() { }Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
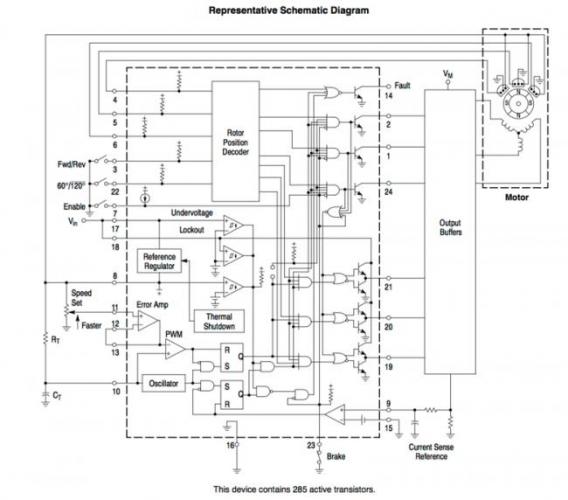
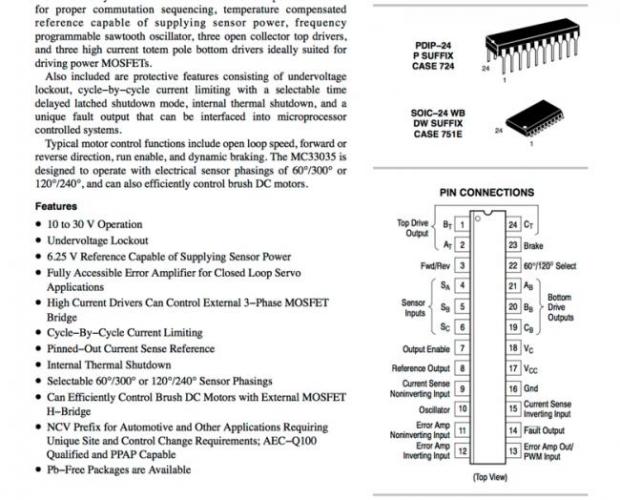
Данная микросхема:
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Печатная плата
Готовый вариант
Итог
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.
- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.
Представленная ниже схема является основой для экспериментов с bldc-моторами. Для тех, кто не в курсе, BLDC — это одна из разновидностей синхронных моторов, которая используется, например, в винчестерах, сидирумах, дисководах и т.п. (типа таких, как на картинке справа).
Теорию работы синхронных движков в общем виде можно почитать здесь, чуть конкретнее про BLDC — вот здесь.
Схема позволяет организовать необходимое для питания BLDC-моторов трёхфазное напряжение из обычного однофазного (с помощью ШИМ-модуляции).
Никаких специальных возможностей управления работой мотора (по датчикам Холла или по обратной ЭДС обмоток) в этой схеме не предусмотрено. Про различные варианты такого управления мы поговорим позже, а здесь я постараюсь подробно описать исходя из каких соображений и как рассчитываются элементы именно базовой схемы.
Итак, схема:
Как видите, нам понадобятся: 1 контроллер ATtiny2313, 3 микрухи спаренных полевиков FDS4542 (N- и P-channel в одном восьминогом корпусе), 6 биполярных транзисторов (я использовал FMMT2222 — маленькие биполярнички в корпусах SOT23 c маркировкой 1P), 3 диода (я взял LL4148) и некоторое количество всяких резисторов и кондёров. (их номиналы будут указаны ниже).
Суть схемы довольно простая — микроконтроллер управляет тремя абсолютно аналогичными силовыми каналами (поэтому на схеме показан только один), каждый из которых имеет на выходе комплиментарную пару мощных полевиков, образующую полумост с независимым управлением плечами.
То есть каждое из плеч можно включать и выключать независимо от другого, что даёт возможность получить на выходе полумоста три разных состояния: Hi — выход полумоста подключен к питанию (верхний полевик открыт, нижний — закрыт), Lo — выход полумоста подключен к общему проводу (верхний полевик закрыт, нижний — открыт) и Z — выход полумоста отключен и от питания, и общего провода (оба полевика закрыты).
В принципе, можно получить ещё и четвёртое состояние — когда оба полевика открыты, но в этом случае получится КЗ и один из полевиков просто сгорит. Поэтому такое состояние мы будем считать запрещённым и с ним нам как раз придётся всеми способами бороться.
В схеме предусмотрено отдельное питание для схемы управления (+5В) и для силовой части (+12В), поэтому для верхнего плеча пришлось делать развязку на транзисторах T1, T2. Два транзистора были использованы для того, чтобы умощнить эту развязку и сделать её характеристику симметричной, чтобы она могла не только быстро заряжать, но и разряжать затвор верхнего полевика (то есть это ещё и драйвер).
Нижний полевик управляется без всякого драйвера, напрямую от ноги микроконтроллера.
Резисторы R7, R8 — это необязательные подтяжки, назначение которых — предотвратить самопроизвольные открытия полевиков в тот момент, когда ноги микроконтроллера ещё не настроены на выход и находятся в Z-состоянии (при старте). Соответственно, номиналы этих резисторов не очень важны, они просто должны быть намного больше номиналов резисторов R5 и R6, чтобы не мешать нормальной работе схемы после запуска контроллера. Более того, поскольку нам главное, чтобы полевики оба сразу не открылись (если один откроется — шут с ним), можно оставить только R8. Я так и сделал, — взял номинал резистора R8 равным 10 кОм, а резистор R7 вообще выкинул.
Стоит отметить, что помимо функции подтяжки, R7 может выполнять ещё и функцию борьбы с наводками на линию управления транзистором T2. Ток в этой линии очевидно будет гораздо меньше, чем через R5 и в случае, если такие наводки всё же будут, резистор R7 придётся вернуть (это если вы свою разводку платы будете делать).
Ну что, дальше давайте считать. Исходить будем из двух предпосылок: 1) полевиками нужно рулить максимально быстро, но без фанатизма; 2) высшая математика — удовольствие на любителя (особенно когда есть осциллограф и можно всё проверить на практике). В связи с этими, особой точностью и правильностью я увлекаться не буду, но, по крайней мере, рассчёты позволят на что-то ориентироваться.
Начнём с нижнего полевика (N-канальник). Для максимально быстрого управления этим полевиком нам нужно выжать с ноги микроконтроллера максимальный ток и в то же время эту ногу не поджарить.
Пиковый ток на ногу в документации на ATtiny2313 не указан, поэтому будем исходить из значений, указанных в Absolute maximum ratings — 40 мА. При этом максимальный ток у нас будет протекать в самом начале заряда, когда разность потенциалов на затворе и ножке микроконтроллера максимальна. Таким образом, получается R5=5В/40мА=125 Ом. Ближайшее большее значение стандартного номинала — 150 Ом, но мы возьмём 200 Ом, чтобы был небольшой запас. Максимальный ток при этом получится 5/200=25 мА.
Теперь давайте оценим время переключения нашего полевика с резистором 200 Ом в затворе. Оценить это время можно по формуле t=Qg/I, где Qg — total gate charge (берём из документации на FDS4542), I — ток драйвера (мы возьмём максимальный расчётный зарядный ток, чтобы точно не ошибиться в меньшую сторону). Получаем t=28 нК / 25 мА = 1,12 мкс.
Зачем нам нужно время переключения? Очень просто. Когда мы будем писать программу управления — мы должны будем учитывать, что полевики закрываются не мгновенно и вводить задержки между закрытием полевика в одном плече и открытием полевика в другом плече, во избежание возникновения сквозных токов (когда полевики в обоих плечах приоткрыты).
Переходим к P-канальному полевику. Тут ситуация попроще и ногу контроллера нам нагружать не нужно, зато нужно не спалить биполярные транзисторы и диод.
Резисторы R1 и R3 в обвязке p-канальника — это просто высокоомные подтяжки и их номиналы не должны нас особо сильно волновать, поэтому я для начала взял их по 10 кОм (чтобы токи через них можно было не учитывать) и про них забыл.
Затворные токи здесь определяются резисторами R2 и R4, а сама обвязка работает следующим образом: при открытии транзистора T2 потенциал базы транзистора T1 падает ниже потенциала его эмиттера, T1 закрывается, а затвор полевика разряжается через диод и резистор R4; при закрытии транзистора T2 потенциал базы транзистора T1 растёт быстрее, чем на его эмиттере, что приводит к открытию T1 и резкому заряду затвора через R2.
Сначала разберёмся с зарядом. По документации ток через FMMT2222 может быть до 600 мА, а для LL4148 — до 450 мА импульсный и до 150 постоянный, поэтому ориентироваться будем на диод и возьмём для расчётов, скажем 150 мА (чтобы ничего сильно не грелось). Исходя из этого, получим сопротивление резистора R4 = (12-0,5)В/150мА = 76,6 Ом. Далее аналогично, — возьмём ближайший стандартный номинал больше расчётного — 100 Ом. Пересчитываем обратно в ток, получаем I = 115 мА. Ну что ж, пусть будет так. При этом время заряда можно оценить на уровне t = 36 нК / 115 мА = 313 нс.
Чтобы сильно не заморачиваться, возьмём R2 такого же номинала, как и R4, и будем считать, что время закрытия будет примерно такое же, как и время открытия.
Теперь проверим, насколько правильно мы выбрали R1. Чтобы транзистор T1 нормально открывался, ток базы должен быть не более чем в h21 раз меньше тока коллектора. Ток коллектора у нас 100 мА, h21 (из доки) не менее 35, значит ток базы нам нужен не менее 2,86 мА. А он у нас получается 12В/10кОм = 1,2 мА. Ну, тогда возьмём R1 = 3,3 кОм. В этом случае ток базы = 12/3,3 = 3,6 мА. Так и оставим.
Тот же расчёт проделаем для транзистора T2. Ток коллектора у него такой же, как и у T1, значит ток базы тоже должен быть не менее 2,86 мА. Значит R6 должен иметь номинал менее 5/2,86=1,75 кОм. Возьмём с запасом резистор на 1 кОм.
В итоге получилось: R1=3,3 кОм, R2=R4=100 Ом, R3=10 кОм, R5=200 Ом, R6=1 кОм, R7 мы выкинули, R8=10 кОм. При этом время переключения нижнего полевика мы ожидаем на уровне 1,12 мкс, а верхнего — на уровне 313 нс.
Что у нас осталось? Во-первых, конденсаторы. С1=С2=20 пФ, С3=100 мкФ, С4=0,1 мкФ. При проектировании платы C3,C4 нужно расположить как можно ближе к силовым ногам ключей. Во-вторых, на схеме не полностью показана обвязка микроконтроллера. Нужно подтянуть ногу MCLR к питанию через резистор 1 — 10 кОм, а так же поставить конденсатор 0,1 мкФ между питанием и общим проводом поближе к ножкам контроллера.
Что ж, — собираем и тестим.
Скачать плату в формате DipTrace 2.3
Готовый девайс:
Для снятия осциллограмм была написана тестовая программа, в которой транзисторы специально переключались с интервалами гораздо больше расчётных (на случай, если расчёты окажутся слишком кривыми).
Осциллограммы:
Как видите, наши рассчёты дали примерно адекватные результаты, по крайней мере корректировать ничего не нужно.
Простейшая программка для контроллера (пуск / стоп / реверс / изменение питающего напряжения и частоты вращения)
Небольшое видео, демонстрирующее работу устройства
BLDC-контроллеры.BLDC-контроллеры подразделяются на два типа по управлению:1) Управление Скоростью (оборотами) с постоянным моментом. Данный тип контроллеров поддерживает преимущественно одинаковый момент на валу двигателя во всем рабочем диапазоне оборотов. Обороты напрямую регулируются ручкой (педалью) газа. Данный тип управления хорошо подходит для управления двигателями с небольшой нагрузкой на валу (вентиляторы). Если установить его на транспортное средство, то при старте будет маленький момент, и соответственно с малым ускорением.2) Управление моментом на валу двигателя. Такой способ управления аналогичен классическому ДВС-двигателю и обычно используется на электротранспорте, исключая толчки и рывки, вредные для трансмиссии. На холостых оборотах двигатель всегда набирает максимальные обороты, но под нагрузкой такого не происходит. С помощью ручки или педали газа, наращивая момент, под нагрузкой обороты возрастают аналогично бензиновым двигателям, обеспечивается плавное нарастание мощности и скорости при движении, исключая вредное воздействие на механические узлы. Если установить его на транспортное средство, то при старте будет максимальный момент, с хорошим ускорением.Кроме того, BLDC-контроллеры подразделяются на два типу сигнала:1) Прямоугольный сигнал (стандартное, скалярное управление). Во время работы слышится небольшой писк контроллера.2) Векторный (синусный) сигнал. За счёт сглаживания углов сигнала, такие контроллеры характеризуются низким шумом по сравнению со скалярными контроллерами и имеют КПД на 7-10% выше, чем скалярные контроллеры. Чем выше КПД, тем при одинаковой батарее уедете дальше, что особенно актуально для крупногабаритного электротранспорта, где разница может составлять десятки километров. Серия контроллеров HPC – универсальные, управление скоростьюмоментом. Программно меняется тип управления моментомскоростью. Скалярное управление сигналом. При Реверсе работает на полную мощность.Серия контроллеров VEC – управление только моментом. Векторное управление сигналом. КПД VECбольше на 7-10%, чем у При Реверсе работает на мощность менее 50%.По опыту эксплуатации, контроллеры VEC надёжнее чем HPC, (со слов инженеров с завода), но лично у нас был 1 случай поломки HPC.Используемые источники:
Серия контроллеров HPC – универсальные, управление скоростьюмоментом. Программно меняется тип управления моментомскоростью. Скалярное управление сигналом. При Реверсе работает на полную мощность.Серия контроллеров VEC – управление только моментом. Векторное управление сигналом. КПД VECбольше на 7-10%, чем у При Реверсе работает на мощность менее 50%.По опыту эксплуатации, контроллеры VEC надёжнее чем HPC, (со слов инженеров с завода), но лично у нас был 1 случай поломки HPC.Используемые источники:
- https://habr.com/post/373397/
- https://radiohlam.ru/bldc_motor/
- https://goldenmotor.ru/bldc-controller/

 Инструменты и приспособления KREG для дерева. Выгодные комплекты
Инструменты и приспособления KREG для дерева. Выгодные комплекты Приспособление для соединения саморезами Kreg Jig R3 Jr.
Приспособление для соединения саморезами Kreg Jig R3 Jr. Ёмкостный датчик уровня жидкости: подключение, примеры работы
Ёмкостный датчик уровня жидкости: подключение, примеры работы