 |
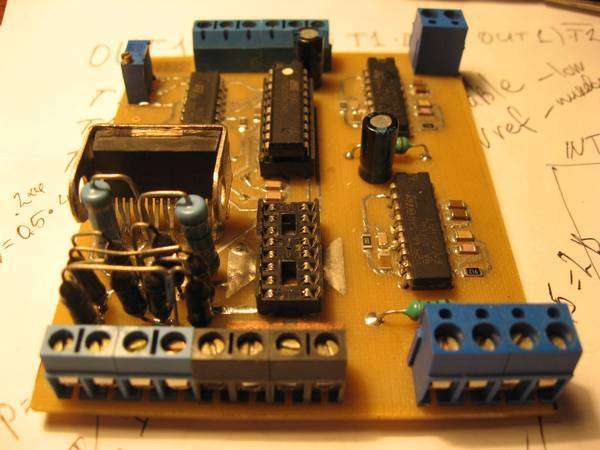
| Первая модификация силового блока. L293 вытащена. |
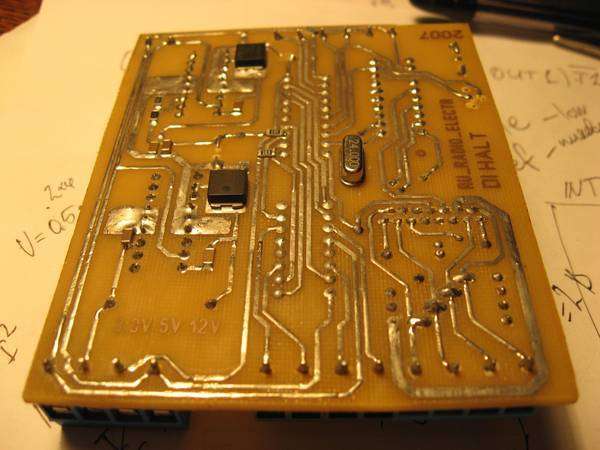 |
| Вид снизу |
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения. В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Униполярный отличается от биполярного только тем, что ему нужна куда более простая схема управления, а еще у него значительно слабее момент. Так как работает он только половинами обмоток. НО! Если оторвать нафиг средний вывод униполярника, то мы получим обычный биполярный. Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов. Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Где взять шаговый двигатель. Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат. А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N. Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит. Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Правда на будущее, когда я буду делать роботу шаговый привод, я возьму не связку L297+L293, а микруху L6208 которая может и чуть слабей по току, но зато два в одном! Сразу подключай двигатель и работай. Если же их покупать, то на L6208 получается даже чуть дешевле.
Документация по микросхемам:
 Драйвер шагового двигателя - устройство, виды и возможности
Драйвер шагового двигателя - устройство, виды и возможностиУ любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
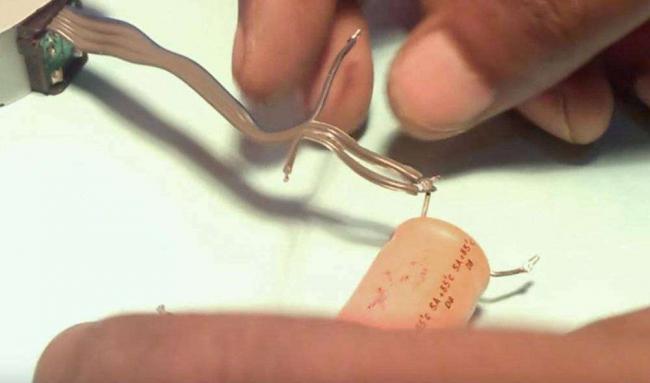
Для эксперимента использовался вот такой шаговый двигатель:
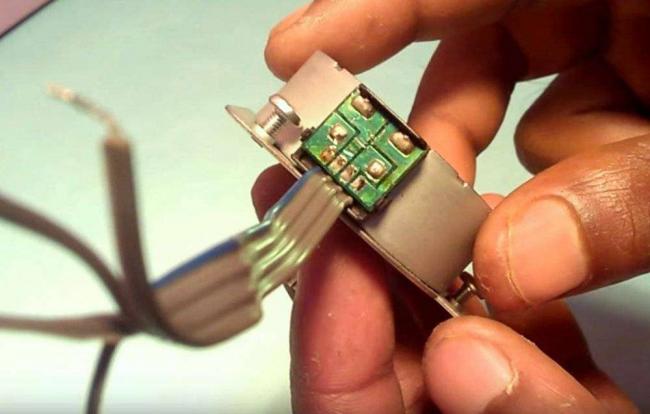
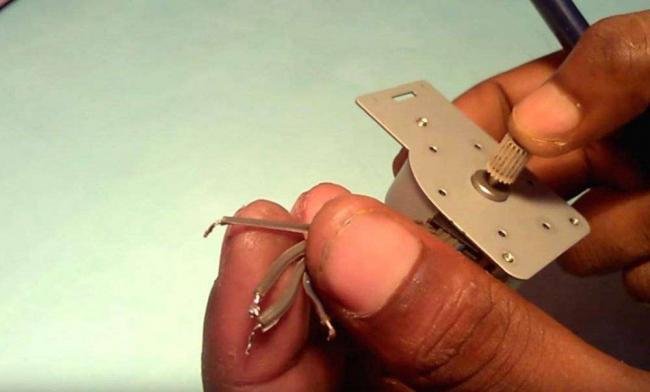
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
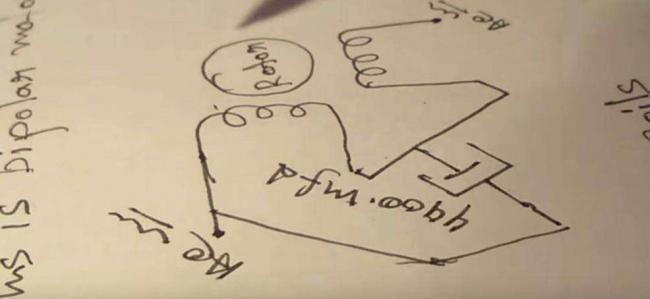
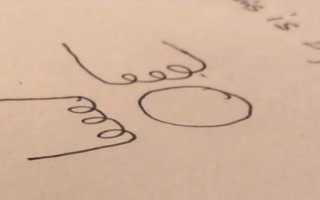
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
Замыкаем обмотки последовательно, как на схеме ниже.
 Коллекторный электродвигатель: достоинства, недостатки, область применения
Коллекторный электродвигатель: достоинства, недостатки, область примененияСередину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Источник: https://sdelaysam-svoimirukami.ru
Довольно часто при ремонте принтеров возникает вопрос «Как быстро проверить шаговый двигатель подручными средствами?». Я не буду рассказывать теорию, а лишь поделюсь одним из способов. Для этого нам понадобятся: 1. Любой тестер, которым можно прозвонить обмотки и найти их хвосты 2. Любой другой шаговый двигатель аналогичной конструкции. Я думаю вы уже догадались о сути проверки 🙂 Посему не буду томить и выкладываю как есть 🙂 Один ШД у нас будет генератором импульсов для второго. Соединяем обмотки шаговых двигателей по схеме:
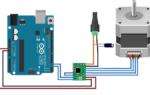
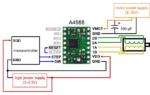 Драйвер шагового двигателя A4988. Подключения к Arduino и пример использования
Драйвер шагового двигателя A4988. Подключения к Arduino и пример использования| Схема |
Затем, вращая ротор одного,если все в порядке, наблюдаем вращение ротора другого. Одно лишь замечание — если вам надо проверить ШД1, то ШД2 должен быть «мощностью» такой же или больше, т.к. при меньше «мощности» ШД2 будете наблюдать «дерганье» ротора ШД1, вместо его вращения. (Криво объяснил, но понятно, что требуется. Если напишете красивее — в комменты — исправлю).
 |
| Фото на память |
Ну и напоследок — видео процесса: Как обычно вопросы и замечания в комментариях.Использование материала блога без «живой» ссылки на этот блог — запрещено.Используемые источники:
- http://easyelectronics.ru/upravlenie-shagovym-dvigatelem.html
- https://kavmaster.ru/zapusk-shagovogo-dvigatelya-bez-elektroniki/
- http://astlevsha.blogspot.com/2011/12/1.html
 Управление шаговым двигателем с помощью драйвера двигателей Motor Shield L293D
Управление шаговым двигателем с помощью драйвера двигателей Motor Shield L293D Драйвер шагового мотора Pololu на DRV8825 8,2-45В 2,2А
Драйвер шагового мотора Pololu на DRV8825 8,2-45В 2,2А Ремонт шуруповерта Интерскол своими руками: как починить редуктор и кнопку?
Ремонт шуруповерта Интерскол своими руками: как починить редуктор и кнопку? Термоакустический двигатель – двигатель Стирлинга без поршней
Термоакустический двигатель – двигатель Стирлинга без поршней