
Рассмотрим, что такое ШИМ или PWM. А также, чем отличается ШИМ от ШИР. Алгоритм широтно-импульсной модуляции применяется для плавного изменения мощности на нагрузке, поступающей от источника питания. Например, с целью регулирования скорости вращения вала двигателя; плавности изменения яркости освещения или подсветки. Отдельной широкой областью применения ШИМ являются импульсные источники питания и автономные инверторы.
Для питания нагрузки часто необходимо изменять величину напряжения, подводимого от источника питания. Принципиально можно выделить два способа регулирования напряжения – линейный и импульсный.

Примером линейного способа может послужить переменный резистор. При этом значительная часть мощности теряется на резисторе. Чем больше разница напряжений источника питания и потребителя, тем ощутимей потери мощности, которая попросту «сгорает» на резисторе, превращаясь в тепло. Поэтому линейный способ регулирования рационально применять только при небольшой разнице входного и выходного напряжений. В противном случае коэффициент полезного действия источника питания в целом будет очень низкий.

В современной преобразовательной технике преимущественно используются импульсное регулирование мощности на нагрузке. Одним из способов реализации импульсного регулирования является широтно-импульсная модуляция ШИМ. В англоязычной литературе PWM – pulse-width modulation.
Принцип импульсного регулирования
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет следующий вид. Источника постоянного напряжения Uип ключом K подсоединяется к нагрузке Н. Ключ К переключается с определенной частотой и остается во включенном состоянии определенную длительность времени. С целью упрощения схемы я на ней не изображаю другие обязательные элементы. В данном контексте нас интересует только работа ключа К.
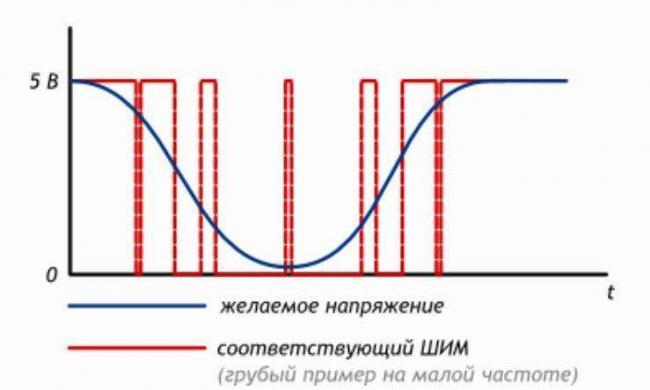
Чтобы понять принцип ШИМ воспользуемся следующим графиком. Разобьем ось времени на равные промежутки, называемые периодом T. Теперь, например половину периода мы будем замыкать ключ K. Когда ключ замкнут, к нагрузке Н подается напряжение от источника питания Uип. Вторую часть полупериода ключа находится в закрытом состоянии. А потребитель останется без питания.
Время, в течение которого ключ замкнут, называется временем импульса tи. А время длительности разомкнутого ключа называют временем паузы tп. Если измерить напряжение на нагрузке, то оно будет равно половине Uип.
 Микросхемы ШИМ-контроллера UC3844, UC3845, UC2844, UC2845
Микросхемы ШИМ-контроллера UC3844, UC3845, UC2844, UC2845Среднее значение напряжения на нагрузке можно выразить следующей зависимостью:
Uср.н = Uип tи/T.
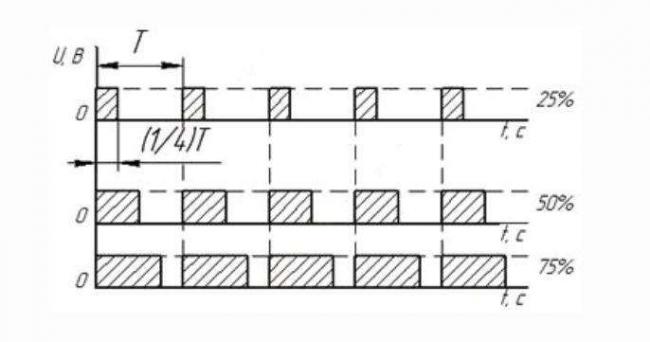
Отношение времени импульса tи к периоду T называют коэффициентом заполнения D. А величина, обратная ему называется скважностью:
S = 1/D = T/tи.
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма сигнала называется меандр.Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср.н от 0 до Uип:
Uср.н = Uип∙D.
А соответственно регулировать и величину подводимой мощности:
Pср.н = Pип∙D.
 Простой ШИМ-регулятор на таймере NE555
Простой ШИМ-регулятор на таймере NE555Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.
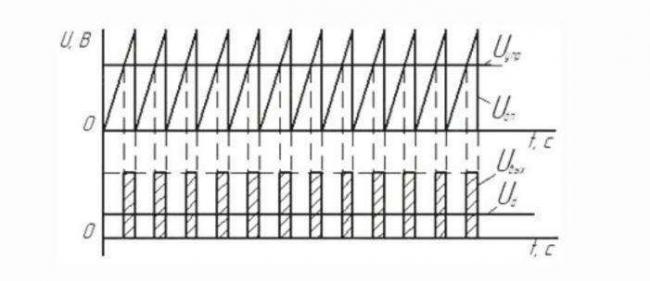
При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
 Как пользоваться цифровым осциллографом, преимущества и недостатки, где купить
Как пользоваться цифровым осциллографом, преимущества и недостатки, где купитьШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов. Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
Оглавление:
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
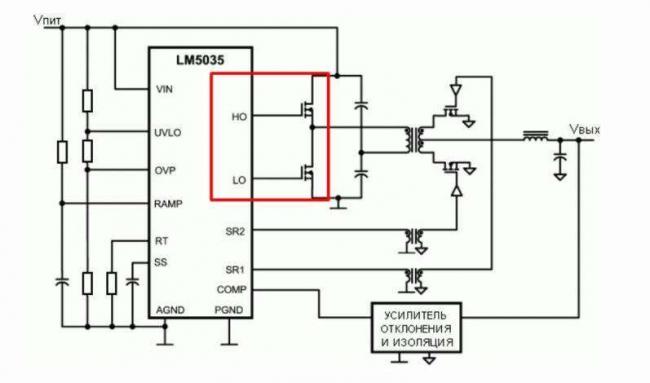
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
В далекие, теперь уже времена прошлого века, в блоках питания для понижения или повышения напряжения применялись линейные трансформаторы. Диодный мост и электролитический конденсатор сглаживал пульсацию. Далее напряжение стабилизировалось линейными или интегральными стабилизаторами. Вес таких источников питания был достаточно большой, ничуть не меньше были и габариты. Чем большая мощность требовалась от БП, тем в несколько раз был объемнее и тяжелее сам блок питания.
Если заглянуть в современную бытовую технику, то сейчас вы увидите импульсный источник питания, или блок питания – сокращенно ИБП. В таких модулях питания используется в качестве управления специальная микросхема-контроллер Широтно-импульсной модуляции, или сокращенно ШИМ. Здесь мы и поговорим об устройстве и назначении этого элемента.
Преимущества и определения ШИМ-контроллера
ШИМ-контроллер это совокупность нескольких функциональных схем для того чтобы управлять выходными силовыми каскадами, собранными обычно на транзисторах. Управляются они исходя из той информации, которую микросхема ШИМ получает от выходных цепей. В зависимости от тока или выходного напряжения на выходе блока питания ШИМ-контроллер регулирует время открытия ключевого транзистора. Таким образом, получается замкнутый круг. Эта часть блока питания называется обратная связь или ОС.
В литературе и интернет источниках можно встретить случаи, когда ШИМ-контроллерами называют различные генераторы сигналов с регулировкой широты импульса, НО без обратной связи! К таким генераторам (на NE555 и др.) не совсем корректно применять понятие контроллер, скорее регулятор или генератор.
Широтно-импульсная модуляция – это тот метод, когда сигнал модулируется не с помощью изменения амплитуды или частоты, а с помощью длительности импульса. Далее, после интеграции импульсов при помощи LC-фильтров происходит сглаживание модулированного сигнала.
Характеристики ШИМ.
Для Широтно-модулированного сигнала характеристик всего две:
- Частота следования импульсов
- Скважность импульсов, или коэффициент заполнения. По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
S=1/T
T – Период сигнала
T=1/f
D=T/1=1/S
F – Частота сигнала
Таким образом, коэффициент заполнения ничто иное как интервал от периода сигнала. Отсюда следует что он (коэффициент заполнения) всегда будет меньше единицы, что не скажешь о скважности – она всегда будет больше 1.
Возьмем пример:
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Отличительные особенности импульсных и линейных БП.
Существенным преимуществом импульсных источников питания перед линейными является хороший КПД (около 90%)
Структура ШИМ
Давайте рассмотрим структуру любого ШИМ-контроллера. Хоть в своем огромном семействе разные ШИМ-ы и обладают дополнительными функциональными особенностями, но все же они все похожи.
Заглянув в микросхему, мы увидим полупроводниковый кристалл, в котором находятся следующие функциональные составляющие:
- Генератор последовательных импульсов.
- Источник опорного напряжения.
- Схема обратной связи (ОС), усилитель ошибки.
- Генератор прямоугольных импульсов, управляющий транзисторами, которые в свою очередь коммутируют силовые ключевые каскады.
Количество этих ключей, зависит от предназначения самого ШИМ-контроллера. Например, простые обратноходовые схемы построены на 1-м силовом ключе, полу мостовые на 2-х, а мостовые преобразователи на 4-х ключах.
Выбирая ШИМ-контроллер необходимо исходит из того какой ключ используется. Например, если в блоке питания в качестве выходного каскада стоит биполярный транзистор, то подойдет большая часть контроллеров. Связано это с тем, что управлять таким силовым ключом достаточно просто – подавая импульсы на базу транзистора, мы открываем и закрываем его.
А вот если мы будем использовать полевые транзисторы с изолированным затвором (MOSFET) или IGBT транзисторы, то здесь уже немного сложнее. Выходной транзистор-ключ мало того что нужно открыть – путем заряда затвора, так нам его еще надо и закрыть, естественно разряжая затвор ключа. Для таких схем используются соответствующие ШИМ-контроллеры. У них на выходе стоит 2 транзистора – один заряжает затвор ключа, а другой разряжает, замыкая его на землю.
На заметку:
Многие ШИМ-контроллеры совмещаются с силовыми ключами в один корпус. Если этот контроллер для маломощного блока питания, то выходные транзисторы устанавливаются прямо в микросхему контроллера.
В случае же если блок питания достаточно мощный, то интеграция происходит в обратную сторону – микросхема ШИМ-контроллер устанавливается в корпус силового ключа. Такую микросхему легко установить на радиатор. Соответственно количество выводов у такой микросхемы не как у транзистора.
Грубо говоря, ШИМ-контроллер представляет собой компаратор, на один из входов которого приходит сигнал обратной связи, на другой пилообразный сигнал генератора. Когда первый по амплитуде превышает второй, на выходе формируется импульс.
Тем самым ширина импульса на выходе зависит от соотношения входных сигналов. Предположим, что мы подключили более мощную нагрузку к выходу БП, и напряжение дало просадку. На обратной связи будет тоже падение. Что же произойдет?
В периоде сигнала начнет преобладать пилообразный сигнал, длительность импульсов на выходе увеличится и напряжение компенсируется. Происходит это все в доли секунды.
Частота работы генератора ШИМ-а задается RC-цепью
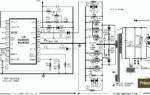
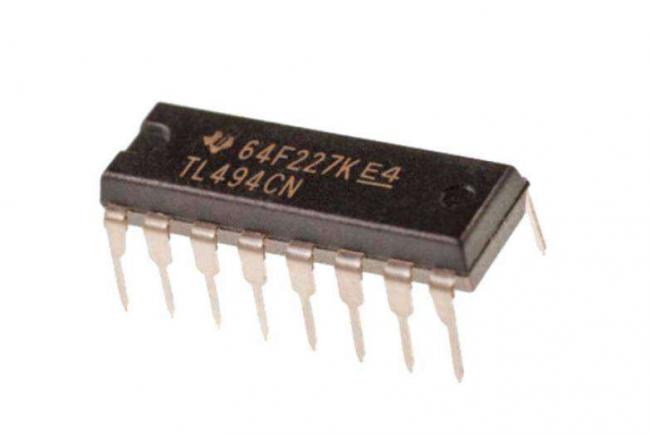
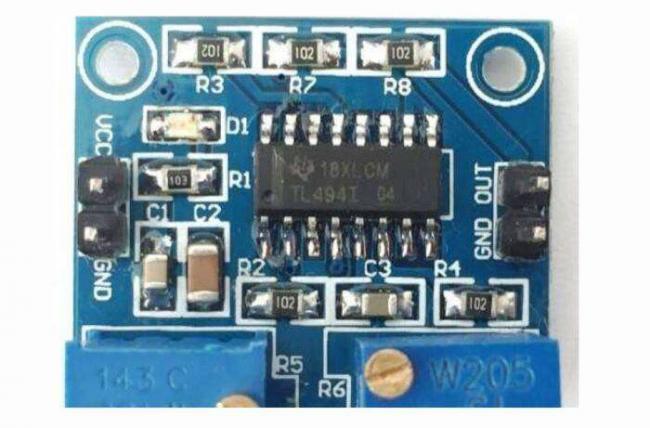
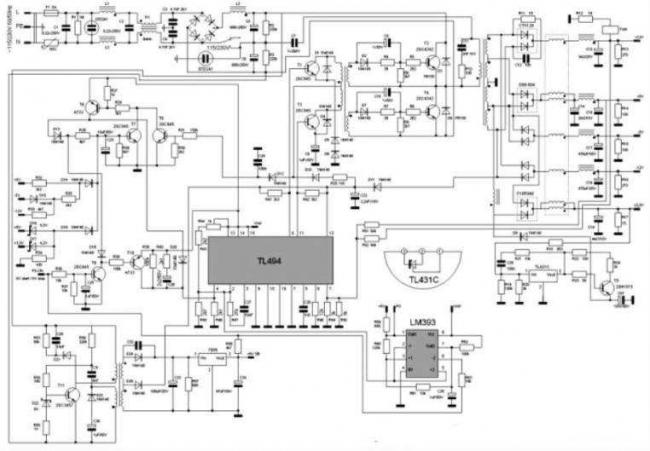
Пример использования ШИМ-контроллера на базе TL494 – довольно распространённой микросхемы. Далее рассмотрим назначение отдельных выводов этой микросхемы.
Давайте разберем назначение и название этих выводов:
- Vcc (Ucc, Vss)– вывод питания микросхемы.
- GND (Ground – земля) – земля или общий провод
- OUT – выход контроллера. С этого вывода и выходит управляющий сигнал для переключения ключей. Иногда выходные выводы обозначают HO и LO (для полумоста)
- Vc (Uc) – Вывод контролирующий питание. При пониженном питании возможен перегрев и выход из строя ключей. Контрольный вывод заблокирует работу контроллера в таком случае.
- Vref – опорное напряжение, чаще всего на этот вывод вешается конденсатор, соединенный с землей.
- ILIM – сигнал с измерителя тока. Соединен с обратной связью для ограничения тока.
- ILIMREF – регулировочный вывод для сработки по току
- SS – мягкий старт контроллера. Используется для плавного запуска блока питания и выхода в штатный режим работы.
- RtCt – выводы RC-цепи, которая и задает частоту работы ШИМ.
- CLOCK – выходной сигнал тактовых синхроимпульсов. Предназначен для синхронизации работы нескольких ШИМ-контроллеров в одной схеме.
- RAMP – сравнивающий вывод. На нем присутствует пилообразный сигнал генератора и сигнал обратной связи для формирования ШИМ -сигнала.
- INV и NOINV – входы компаратора, формирующие сигнал усилителя ошибки. От величины напряжения на INV зависит длительность импульса ШИМ.
- EAOUT – дополнительный выход усилителя ошибки.
Для того чтобы закрепить сказанное выше рассмотрим пару примеров использования ШИМ-контроллеров, а так же их схем включения. Сделаем это на примере микросхем:
- TL494
- UC3843
Эти микросхемы часто используются в различных блоках питания, в том числе и компьютерных. Когда дело доходит до переделки компьютерного блока питания в лабораторный бп или зарядное устройство для аккумулятора, то, как раз стараются подобрать бп на TL494.
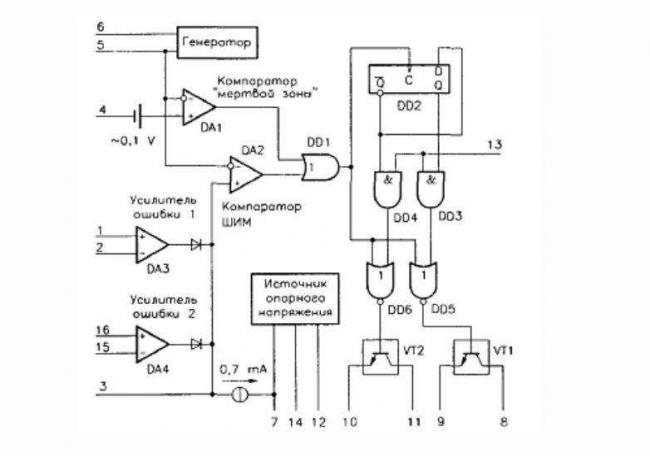
Обзор ШИМ TL494
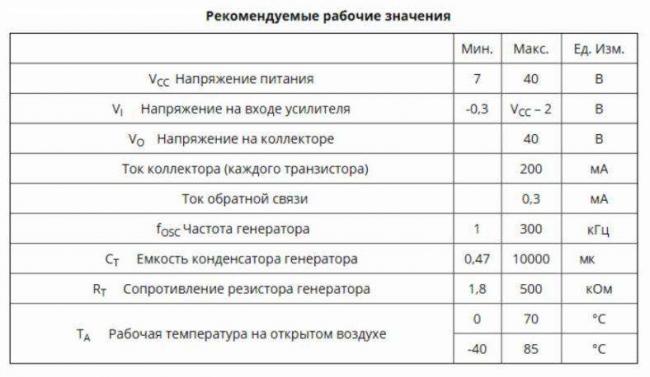
Технические характеристики ШИМ-контроллера TL494
Ниже на рисунке дана распиновка TL494:
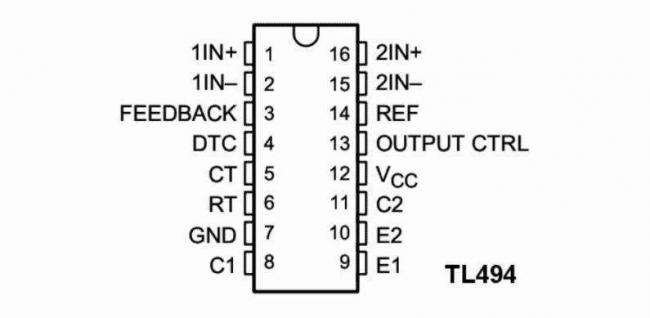
- Неинвертирующий вход первого компаратора ошибки
- Инвертирующий вход первого компаратора ошибки
- Вход обратной связи
- Вход регулировки мертвого времени
- Вывод для подключения внешнего времязадающего конденсатора
- Вывод для подключения времязадающего резистора
- Общий вывод микросхемы, минус питания
- Вывод коллектора первого выходного транзистора
- Вывод эмиттера первого выходного транзистора
- Вывод эмиттера второго выходного транзистора
- Вывод коллектора второго выходного транзистора
- Вход подачи питающего напряжения
- Вход выбора однотактного или же двухтактного режима работы микросхемы
- Вывод встроенного источника опорного напряжения 5 вольт
- Инвертирующий вход второго компаратора ошибки
- Неинвертирующий вход второго компаратора ошибки
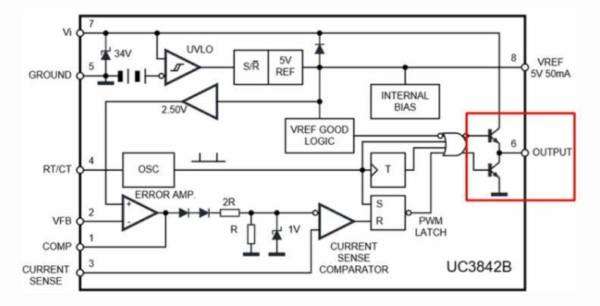
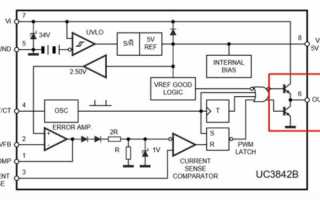
Обзор микросхемы UC3843
Еще одна популярная микросхема используемая в качестве ШИМ-контроллеров компьютерных и не только блоков питания – это микросхема 3843. распиновка её находится ниже. Как видно, у нее 8 выводов, но функции такие же как у TL949. Можно встретить эту микросхему в 14-выводном корпусе и часть выводов у неё (NC) – то есть не используется.
Рассмотрим назначение выводов:
- Вход компаратора (усилителя ошибки).
- Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
- Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
- Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
- Общий.
- Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
- Напряжение питания микросхемы.
- Выход источника опорного напряжения (5В, 50 мА)
Структура микросхемы UC3843
Можно заметить, что и эта микросхема тоже похожа на все остальные ШИМ-контроллеры.
Простой блок питания на UC3842
Микросхема ШИМ с силовым ключом в одном корпусе
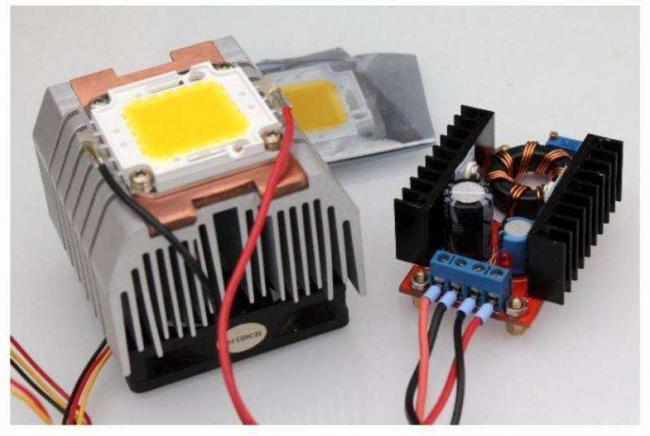
Подобные ШИМ-контроллеры используются как в импульсных блоках питания на базе импульсного трансформатора, так и в DC-DC понижающих или повышающих преобразователях.
Можно привести в пример одну из самых распространенных микросхем в этом сегменте – LM2596. На её базе можно найти большое количество схем преобразователей, в том числе и изображенная ниже.
LM2596 включает в себя все технические решения, описанные выше, плюс в неё еще интегрирован силовой ключ на ток до 3 Ампер.
Структура микросхемы LM2596
Как можно увидеть больших отличий от микросхем, которые мы рассматривали ранее в ней нет.
Еще один пример блока питания для светодиодных лент на ШИМ-контроллере 5L0380R – У неё всего 4 вывода. Как можно заметить в схеме отсутствует силовой ключ. Естественно он в микросхеме, а сама микросхема выполнена в корпусе транзистора и крепится на радиатор.
Изучая ШИМ-контроллеры можно сделать несколько выводов: Если мы имеем дело с мощным источником питания и нам необходима достаточная гибкость использования этого контроллера, то такая микросхема как TL494 (и подобные) подходит для таких задач лучше. А если блок питания средней и невысокой мощности, то вполне свою роль выполнят ШИМ-контроллеры с интегрированными в них силовыми ключами. В таких бп нет больших требований к пульсациям и помехам, а выходные цепи можно сгладить фильтрами. Обычно это блоки питания для бытовой техники, светодиодных лент, ноутбуков, зарядных адаптеров.
И напоследок.
Ранее мы уже говорили о том, что ШИМ-контроллер это механизм, который на базе сформированных импульсов за счет изменения ширины импульсов формирует среднее значение напряжения управляемое с цепей обратной связи. Хочу заметить, что классификация и название у каждого автора могут быть абсолютно разными. ШИМ-контроллером могут называть простой регулятор напряжения. В то же время сам ШИМ-контроллер в блоке питания может быть назван – “блокинг-генератор”, “интегральный субмодуль”, “задающий генератор” От того как его назвал тот или иной автор суть не меняется, но могут возникнуть непонимания и разночтения.
Используемые источники:
- https://diodov.net/chto-takoe-shim-shirotno-impulsnaya-modulyatsiya/
- https://ledjournal.info/spravochnik/shirotno-impulsnaya-modulyaciya.html
- https://a-golubev.ru/tehnologii/shim-kontroller-chto-za-zver-takoj.html
 Лабораторный блок питания на модулях из Китая
Лабораторный блок питания на модулях из Китая Самодельный лабораторный блок питания
Самодельный лабораторный блок питания Схема импульсного преобразователя SEPIC: два варианта выполнения
Схема импульсного преобразователя SEPIC: два варианта выполнения