Я сам очень долго не уделял этому вопросу должного внимания. Во первых не хотел разбираться. Во вторых считал, что настройка в рабочих условиях (во время тестовой печати на завышенных режимах) самая правильная. Это конечно верно, но настал момент, когда в моей коллекции появился третий вид драйверов TMC2100 и чтобы их адекватно сравнить с драйверами A4988 нужно их одинаково и правильно настроить по току используемого шагового двигателя.
Что нам даёт правильная настройка тока для шаговых двигателей?
- Снижение шума от работы принтера при завышенном токе
- Избавление от сдвига слоёв (пропуска шагов) при низком токе
- Снижение нагрева шагового двигателя или его драйвера
Какие обычно используют шаговые двигатели?

17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Драйверы шаговых двигателей
A4988 на ток до 2А – очень широко распространён и недорогой
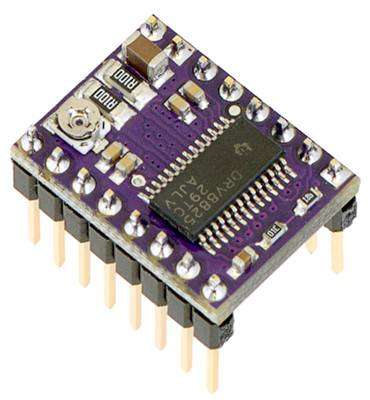
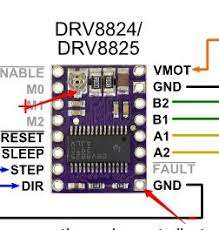
DRV8825 на ток до 2,2А – интересен большей мощностью и микрошагом 1/32
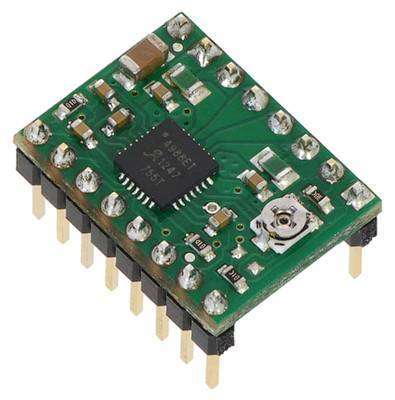
TMC2100 на ток RMS 1,2А (с пиками до 2,5А) – интересен самостоятельным дроблением микрошага 1/16 до 1/255, что в итоге снижает шум работы шагового двигателя не загружая при этом дополнительными расчётами Ардуину.
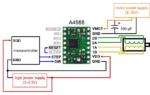 Драйвер шагового двигателя A4988. Подключения к Arduino и пример использования
Драйвер шагового двигателя A4988. Подключения к Arduino и пример использованияВидимо для этого драйвера больше подходят двигатели с низким током, например 17HS4402. С этим двигателем драйвер будет меньше нагреваться, а значит его достаточно обдувать низкооборотистым бесшумным вентилятором.
Настройка тока на драйверах ШД
Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
DRV8825
 ЧПУ СТАНОК НА ARDUINO: ДВИГАТЕЛИ И ДРАЙВЕРЫ
ЧПУ СТАНОК НА ARDUINO: ДВИГАТЕЛИ И ДРАЙВЕРЫCurrent Limit = Vref * 2
Vref = Current Limit / 2
Например для 17HS4401: Vref = 1,7 / 2 = 0,85В
TMC2100
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Current Limit = 1.41 * Irms
Например для 17HS4401: Vref = (Current Limit * 0,707 * 2,5В) / 1,77А = (1,7 * 0,707 * 2,5) / 1,77 = 1,697В
При таком Vref шаговый двигатель возможно будет нагреваться, поэтому Vref придётся подстроить во время работы.
 Управление шаговым двигателем с помощью Arduino
Управление шаговым двигателем с помощью ArduinoВ некоторых случаях для снижения нагрева драйвера приходится снижать Vref, а значит для защиты от пропуска шагов нужно уменьшать ускорения в прошивке. Соответственно при снижении ускорений общая скорость печать 3D принтера снижается. Разумный минимум для ускорений 500 мм/с^2. Отсюда вывод: уровень шума можно снизить почти на любом 3D принтере, снижая ускорения и Vref, но при этом Vref придётся подбирать опытным путём.
Сравнение громкости работы двигателя на разных Vref
- Шаговый двигатель Wantai 42BYGHW609 ток 1,7А
- Драйвер A4988
- 3D принтер Mendel90
Тестовый G-код примерно такой (правил в процессе и после)
Используем аудиоредактор Audacity. Примитивный микрофон подключен к встроенной аудиокарте ПК. Микрофон прижат к корпусу ШД и сверху обмотан поролоном. Надеюсь этого хватит для регистрации уровня шума.
Vref устанавливаю на 0,58В, запускаю программу из Pronterfaceи записываю звук с микрофона. Затем повторяю запись на Vref = 0,78В. Картинки уровней громкости складываю в Фотошопе для наглядности сравнения. Вот что получилось:
Красным Vref = 0,58В
Синим Vref = 0,78В
На некоторых скоростях разность в громкости вполне существенная. Такие напряжения взяты для наглядности, хотя и не сильно отличаются. На не настроенном драйвере может стоять любое напряжение Vref!
Пожалуйста не путайте ток с напряжением Vref, когда пишете об этом
Подробнее про эти драйверы можно почитать на сайтах производителей:
https://www.pololu.com/category/120/stepper-motor-drivers
https://github.com/watterott/SilentStepStick/blob/master/docu/FAQ.md
Для более глубокого понимания формул смотрите отдельную тему на форуме по этому вопросу.
Ссылка на обсуждение на форуме методов борьбы с шумом 3D принтера.
Метки: A4988, DRV8825, TMC2100, драйверы   2016-01-12      Раздел: Настройка, Электроника  
Vref = Imax * 8 * (RS)
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
Vref = Imax/2
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения «20».
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является «+» в данной схеме.
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки — напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
Описание драйвера, характеристики
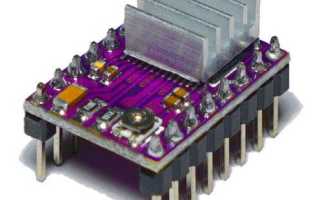
DRV8825 — Это драйвер шагового двигателя, с током до 2.2А и возможностью делить шаги микрошагом вплоть до 1/32. Драйвер пользуется популярностью из-за того, что рассчитан на хороший ток, хорошо делит шаги и его можно легко установить в в плату RAMPS 1.4.
Питание: от 8.2в — 45в
Микрошаг: 1/2, 1/4, 1/8, 1/16, 1/32
Ток: без радиатора до 1.5А на обмотку и 2.2А с радиатором
Защита: От перегрева, от перегрузки по току
Размеры: 20 х 15 х 10 мм
Как настроить микрошаг на DRV8825
Микрошаг, на этом драйвере, выбирается путем подачи нужных напряжений на пины M0, M1, M2. Ниже я приведу таблицу напряжений для разного деления шага. На пинах должен получаться либо высокий либо низкий уровень напряжения, в частности, можно брать напряжение пинов Arduino 5v и все будет работать как надо.

Выбор большего деления шага, дает возможность увеличить разрешение движения, но точность от этого немного страдает, а так же сильно уменьшается момент двигателя.
Подключение драйвера шагового двигателя к arduino
У каждого радиолюбителя возникает тот момент, когда ему необходимо подключить к своему микроконтроллеру шаговый двигатель. Конечно, скажете вы, в «Интернетах» есть куча схем, готовых библиотек и все уже разжевано давным давно. Однако, когда я решил подключить к своей arduino nano драйвер DRV8825 и полез в интернет за схемкой, то обнаружил, что схем несколько. Если быть точным я нашел их 2.
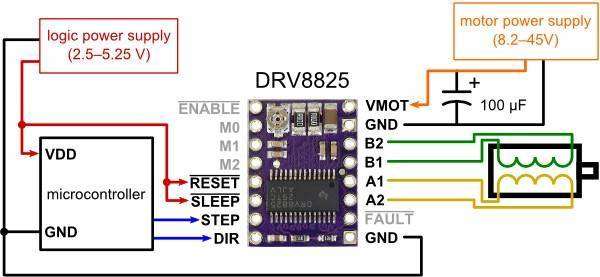
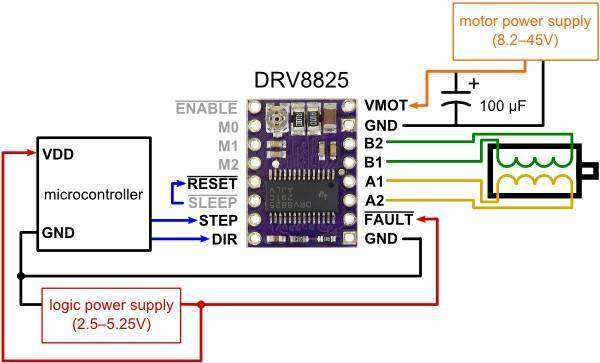
Посмотрев несколько статей, устройств, схем, я пришел к выводу, что вторя схема правильная (нет) и растравил плату. Собрав ее, долго думал почему на двигатель не поступает питание. Я менял драйвера как перчатки, но после 4 штук подумал, что дело не может быть в драйверах. Решил подать питание так как показано на первой схеме. И о чудо! Оно живое!
Возможно, только у меня такие драйвера ( или кривые руки ), однако запустилась только первая схема, которую я теперь постоянно и использую.
Возможные проблемы при подключении DRV8825 к Arduino или другому микроконтроллеру.
- Используется не правильная схема подключения.
- Не правильно настроен ток для двигателя, иногда он выкручен на минимум по умолчанию и поэтому двигатель может не работать. Далее мы это разберем.
- Не правильная программа (скетч).
- Пины которые вы используете не подходят для программы и не могут выдавать сигнал. Например на Arduino nano пины A6,A7 вообще не могут выдавать сигнал, поэтому проверяйте пины вашего контроллера на совместимость.
Подключение DRV8825 к плате RAMPS 1.4
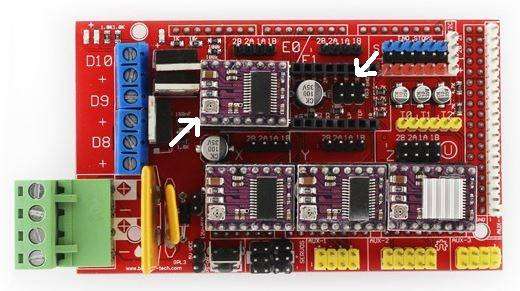
На фото показано каким образом необходимо ставить драйвера на плате. Перемычки микрошага находятся под самими драйверами и подписаны M0, M1, M2 (иногда ms0, ms1, ms2).
У каждого двигателя свой ток работы. Для того, что-бы он правильно работал, необходимо правильно ограничить ток на плате драйвера. Для этого на платах есть потенциометр.
Для начала нужно рассчитать VRef, делается это очень просто.
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Что-бы двигатель не перегревался часто Vref снижают.
Ставим щупы мультиметра так, как показано на картинке выше, меряем, что у нас там и крутим в ту или иную сторону для достижения нужного результата. Двигатель в этот момент будет менять свой звук работы.
Отлично! Ток настроен, а драйвер правильно подключен!
Скетч для проверки драйвера шагового двигателя
#include const int stepsPerRevolution = 200; Stepper myStepper(stepsPerRevolution, 5, 6); void setup() { myStepper.setSpeed(60); Serial.begin(9600); } void loop() { Serial.println("clockwise"); myStepper.step(stepsPerRevolution); delay(500); Serial.println("counterclockwise"); myStepper.step(-stepsPerRevolution); delay(500); }Кстати купить данный драйвер можно на Aliexpress:
ссылка на товар DRV8825 за примерно 60р
Так же вы можете прочитать про подключение и настройку популярного драйвера a4988 по ссылке.
Используемые источники:
- https://3deshnik.ru/blogs/akdzg/pravilnaya-nastrojka-toka-dlya-shagovyx-dvigatelej
- http://cnc-design.ru/nastroika-toka-draiver-shagovogo-dvigatelya.html
- https://you-hands.ru/2018/10/07/kak-podklyuchit-drv8825-k-arduino/
 Твердотельное реле тока — где купить, характеристики, принцип работы
Твердотельное реле тока — где купить, характеристики, принцип работы Как сделать стабилизатор тока для светодиодов?
Как сделать стабилизатор тока для светодиодов? Как сделать стабилизатор тока для светодиодов?
Как сделать стабилизатор тока для светодиодов? Как сделать стабилизатор тока для светодиодов?
Как сделать стабилизатор тока для светодиодов?