![]() Статьи
Статьи ![]() 27
27 ![]() 14.05.2015 06.12.2016
14.05.2015 06.12.2016
Содержание
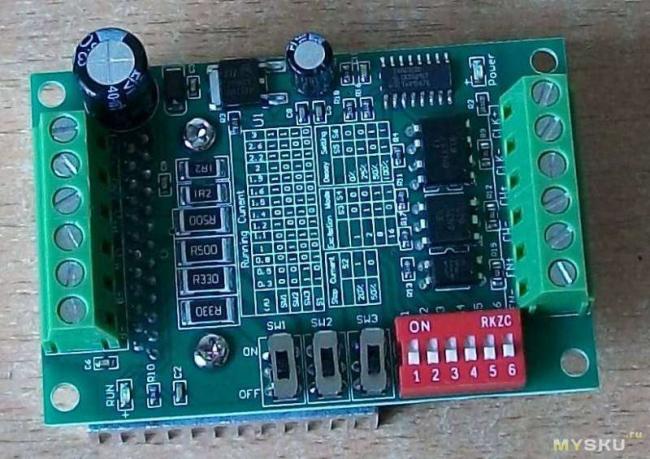
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:
Микрошаг — режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
Значения делителя шага указаны в таблице ниже:
Микрошаг (делитель шага) Значение делителя S3 S4 1:1 OFF OFF 1:2 ON OFF 1:8 ON ON 1:16 OFF ON Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:
Удержание ротора — режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
Ток режима удержания Значение тока S2 20% ON 50% OFF Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1,SW2,SW3,S1:
Ток рабочего режима (А) 0.3 0.5 0.8 1.0 1.1 1.2 1.4 1.5 1.6 1.9 2.0 2.2 2.6 3.0 SW1 OFF OFF OFF OFF OFF ON OFF ON ON ON ON ON ON ON SW2 OFF OFF ON ON ON OFF ON OFF OFF ON OFF ON ON ON SW3 ON ON OFF OFF ON OFF ON ON OFF OFF ON ON OFF ON S1 ON OFF ON OFF ON ON OFF ON OFF ON OFF ON OFF OFF Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
Decay — параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) — Decay = 0%, для треугольного — Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.
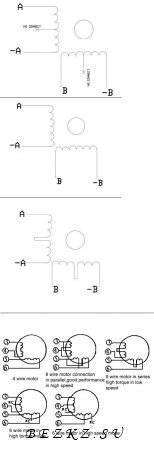
Decay Setting % S5 S6 OFF OFF 25 ON OFF 50 OFF ON 100 ON ON При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть — для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.
Схема подключения для четырехвыводного двигателя
Схема подключения шести выводного двигателя при использовании на половину мощности
Схема подключения 6-ти выводного двигателя при использовании на полную мощность
Схема подключения 8-ми выводного двигателя при паралельном подключении обмоток
Схема подключения 8-ми выводного двигателя при последовательном подключении обмоток
- POWER: индикатор питания
- RUN: индикатор рабочего режима
- Цена: US $4.90
Продолжим нашу эпопею, дальше часть 3. Пришел последний драйвер, на ось Z вместе с контролером на опторазвязке. Последний думаю, долго мне вообще не пригодиться. Что то я погорячился с ним. Так как все мои предыдущие драйвера и этот в том числе с опторазвязкой на самих драйверах. Кто не читал мои предыдущие опусы Вот часть первая и вторая.mysku.ru/blog/aliexpress/41551.htmlmysku.ru/blog/aliexpress/42324.html В общем первый тест драйв, механический. На почте думаю. хорошо попинали посылку, дабы проверить вложение на механическую прочность. Дивитесь сами. Ну что поделать. Видно душу отводят, когда их заваливают разными посылками. Сам заказ от этого продавца, шел без трека и почти 2 месяца. Хотя там еще контролер был с опторазвязкой и релюшками. Сервис никакой. Благодарю, что хоть вообще дошло. Два предыдущих, по сравнению с ним просто скоростники. пару недель. В общем с содроганием достаем вложения в нее. Видим такую картину.
В Статьи / Схемы / Управление шаговыми двигателями — Контроллер шагового двигателя TB6560AHQ Данную плату можно найти и купить во многих магазинах, цена правда превышает себестоимость почти в два раза
Было решенно разработать свою печатную плату, желательно односторонюю, для облегчения ее производства, без перемычек конечно необошлось…В
Схема контроллера шагового двигателя, собрана на специализирлованной микросхеме TB6560 фирмыВ TOSHIBA.В Данная схема подключается к LPT порту, соответсвенно настроенными сигналами STEP, DIR, ENABLE,+5 и минус.В Три оптопары гальванически развязывают схему с ПК.
В
НаВ TB6560AHQ можно настроить:
— ток удержания 25%,50%,100% в процентах от тока номинального драйвераВ
— ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера
— выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16В
В
Максимальный ток 3,5АВ
Максимальное напряжение комутируемое ШД 40ВВ
Максимальное напряжение логики 5,5В
В
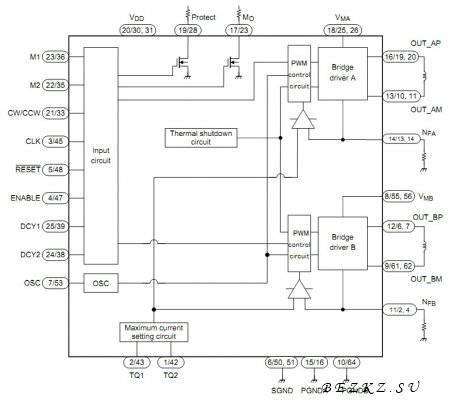
OSC — частота работы, к примеру 100p равняется рабочей частоте 400кГц, боле подробно и формула рассчета в даташите В
MO — сигнализация работыВ (ток нагрузки 1мА)
Protect — сигнализация работы защиты (ток нагрузки 1мА)
В
Упрощенная схемаВ TB6560AHQ:
В
В
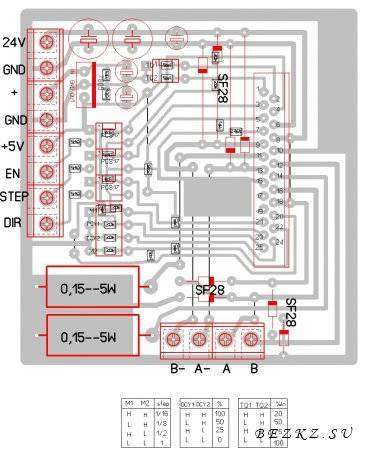
Схема подключения к шаговому двигателю:
В
За счет двух резисторов, (шунтов) 0,15 Ом каждый, драйвер контролирует величину тока, следовательно мощность, при токе 3,5А и сопротивлении 0,15 Ом равняется 1,8 Вт, ставить надо конечно с запасом…Рассчитать сопротивление резисторов в зависимости от тока можно по формуле- R= 0.5 / I
Питание схемы осуществляется через стабилизатор напряжения 7805, можно его запитать от цепи питания двигателя (как правило питание двигателя 24-36В), но при подключении его на 24В уже необходим радиатор небольшой.
Можно поставить промежуточный стабилизатор на 15В, можно запитать от отдельного источника.
Диоды в выходной цепи коммутации двигателя стоят быстродействующие — SF28.
Предусмотрена индикация основных режимов — защита(protect) и работа(MO), но максимальный коммутируемых ток 1мА, следовательно подключать напрямую светодиод нельзя, надо ставить полевые транзисторы.
Из нюансов:1) Необходимо подавать питание сначала схеме управления (5В), а потом силе (ШД), можно сделать задержку и через реле коммутировать силу2) Без подключенных ШД не запускатьВ Схемы включения реле с выдержкой времени, выдержка времени построенна на ёмкости конденсатора, изменяя ёмкость можно менять время. Схема на полевом транзисторе и двух биполярных.
Вы не можете скачивать файлы с нашего сервера печатку от Nikolai4 (на практике не собиралась, перепроверяйте) и описание микросхемыВ TB6560Обсуждение на ФОРУМЕ</tr>В
Дата: 9-11-2012, 20:20, Просмотров: 52356, Автор: Nikolai4 <center>Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь. Мы рекомендуем Вам зарегистрироваться либо войти под своим именем.</center></td></tr></tr></table>Используемые источники:
- http://totcnc.com/tblog/9_instruction-bl-tb6560-v2-0
- https://mysku.ru/blog/aliexpress/42476.html
- https://bezkz.su/publ/shemy/shagovye-dvigateli/700207-tb6560.html
</ul></table></table></table>
</table>



 Из нюансов:1) Необходимо подавать питание сначала схеме управления (5В), а потом силе (ШД), можно сделать задержку и через реле коммутировать силу2) Без подключенных ШД не запускатьВ Схемы включения реле с выдержкой времени, выдержка времени построенна на ёмкости конденсатора, изменяя ёмкость можно менять время. Схема на полевом транзисторе и двух биполярных.
Из нюансов:1) Необходимо подавать питание сначала схеме управления (5В), а потом силе (ШД), можно сделать задержку и через реле коммутировать силу2) Без подключенных ШД не запускатьВ Схемы включения реле с выдержкой времени, выдержка времени построенна на ёмкости конденсатора, изменяя ёмкость можно менять время. Схема на полевом транзисторе и двух биполярных.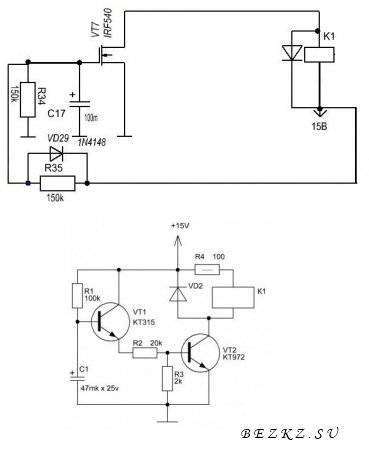

 Подробная инструкция по изготовлению яйцебота на Arduino. От идеи к реализации.
Подробная инструкция по изготовлению яйцебота на Arduino. От идеи к реализации. Устройство плавного пуска электродвигателя
Устройство плавного пуска электродвигателя Инструкция к драйверу ШД BL-TB6600-v1.2
Инструкция к драйверу ШД BL-TB6600-v1.2 Управление шаговым двигателем с помощью Arduino
Управление шаговым двигателем с помощью Arduino