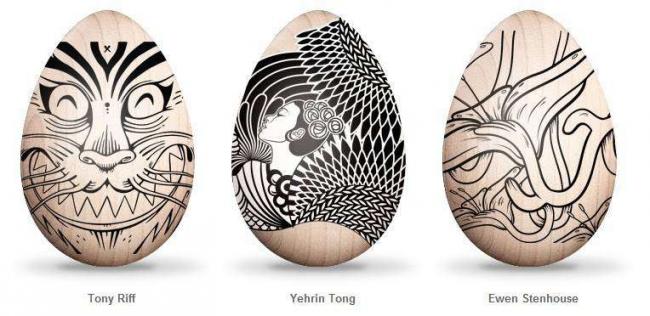
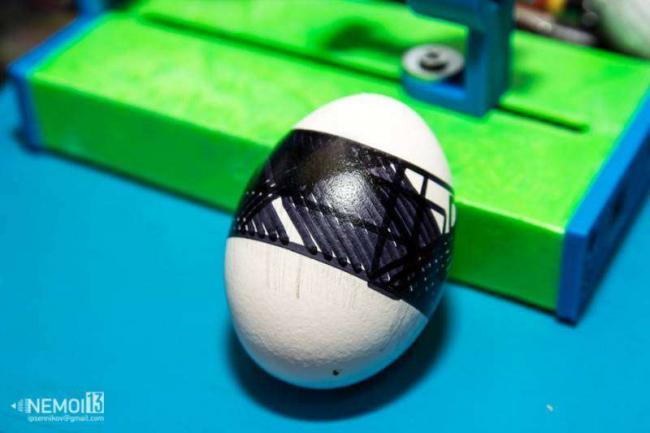
Всем привет! Пасха заканчивается и тема печати различных узоров на яйцах становится чуть менее актуальной, но от этого не становится менее актуальным яйцебот, нужный всем и всегда круглый год 🙂 Для тех кто не в курсе яйцебот — это машина, которая обычным фломастером умеет рисовать на любых сферических объектах: яйцах, теннисных шариках, ёлочных игрушках. Концепт механизма придумал дизайнер Bruce Shapiro в далеком 1990-м году, а не так давно знаменитая компания Evil Mad Scientist Laboratories выпустила в свободную продажу свою версию под названием The EggBot. Надо отдать должное Evil Mad Scientist Laboratories свой проект сделала открытым и разрешает пользоваться программным обеспечением для других яйцеботов даже в коммерческих проектах. Вот такие произведения искусства получаются на выходе:
Пасха заканчивается и тема печати различных узоров на яйцах становится чуть менее актуальной, но от этого не становится менее актуальным яйцебот, нужный всем и всегда круглый год 🙂 Для тех кто не в курсе яйцебот — это машина, которая обычным фломастером умеет рисовать на любых сферических объектах: яйцах, теннисных шариках, ёлочных игрушках. Концепт механизма придумал дизайнер Bruce Shapiro в далеком 1990-м году, а не так давно знаменитая компания Evil Mad Scientist Laboratories выпустила в свободную продажу свою версию под названием The EggBot. Надо отдать должное Evil Mad Scientist Laboratories свой проект сделала открытым и разрешает пользоваться программным обеспечением для других яйцеботов даже в коммерческих проектах. Вот такие произведения искусства получаются на выходе: Простые картинки можно рисовать в любом векторном редакторе, а сложные геометрические объекты можно создать, например, на питоне.Вот пример такой программы:
Простые картинки можно рисовать в любом векторном редакторе, а сложные геометрические объекты можно создать, например, на питоне.Вот пример такой программы:
# Generate a 3200 x 800 geometrical pattern for Eggbot plotting # See http://www.egg-bot.com/ for info on the Eggbot # # Dan Newman, 2 January 2011 # dan dot newman at mtbaldy dot us # Public domain (http://creativecommons.org/licenses/publicdomain/) HEIGHT = float( 800.0 ) WIDTH = float( 3200.0 ) scale = WIDTH / ( 16.0 * 3 ) # 16 horizontal repeats epsilon = float(1.0e-5) # Relative moves for drawing the vertical elements DOWN = [[0.0, scale], [scale, 2*scale], [0.0, scale], [-scale, 2*scale]] UP = [[0.0, -scale], [scale, -2*scale], [0.0, -scale], [-scale, -2*scale]] # How to switch to going up when you stop going down after DOWN[i] DU_switch = [scale, -scale, -scale, scale] # Relative moves for drawing the horizontal elements (L2R = left-to-right) L2R = [[scale, 0.0], [2*scale, scale], [scale, 0.0], [2*scale, -scale]] R2L = [[-scale, 0.0], [-2*scale, scale], [-scale, 0.0], [-2*scale, -scale]] # How to switch to R2L after stopping in L2R at index i LR_switch = [scale, -scale, -scale, scale] # Compute the intersection of two lines # See eggbot_hatch.py for complete details def intersect( P1, P2, P3, P4 ): ''' Determine if two line segments defined by the four points P1 & P2 and P3 & P4 intersect. If they do intersect, then return the fractional point of intersection "sa" along the first line at which the intersection occurs. ''' # Precompute these values -- note that we're basically shifting from # #P = P1 + s (P2 - P1) # # to # # P = P1 + s D # # where D is a direction vector. The solution remains the same of # course. We'll just be computing D once for each line rather than # computing it a couple of times. D21x = P2[0] - P1[0] D21y = P2[1] - P1[1] D43x = P4[0] - P3[0] D43y = P4[1] - P3[1] # Denominator d = D21x * D43y - D21y * D43x # Return now if the denominator is zero if d == 0: return float( -1 ) # For our purposes, the first line segment given # by P1 & P2 is the LONG hatch line running through # the entire drawing. And, P3 & P4 describe the # usually much shorter line segment from a polygon. # As such, we compute sb first as it's more likely # to indicate "no intersection". That is, sa is # more likely to indicate an intersection with a # much a long line containing P3 & P4. nb = ( P1[1] - P3[1] ) * D21x - ( P1[0] - P3[0] ) * D21y # Could first check if abs(nb) > abs(d) or if # the signs differ. sb = float( nb ) / float( d ) if ( sb < 0 ) or ( sb > 1 ): return float( -1 ) na = ( P1[1] - P3[1] ) * D43x - ( P1[0] - P3[0] ) * D43y sa = float( na ) / float( d ) if ( sa < 0 ) or ( sa > 1 ): return float( -1 ) return sa # Determine whether a line segment needs to be clipped to # fit within the drawing page def clip( x1, y1, x2, y2 ): if ( x1 >= 0.0 ) and ( x1 <= WIDTH ) and ( x2 >= 0.0 ) and ( x2 <= WIDTH ) and ( y1 >= 0.0 ) and ( y1 <= HEIGHT ) and ( y2 >= 0.0 ) and ( y2 <= HEIGHT ): return float( -1.0 ) if ( x1 < 0.0 ) or ( x2 < 0.0 ): s = intersect( [x1, y1], [x2, y2], [0.0, 0.0], [0.0, HEIGHT] ) if ( s > 0.0 ): return s if ( x1 > WIDTH ) or ( x2 > WIDTH ): # We allow going an extra pixel across in case there is drawing error s = intersect( [x1, y1], [x2, y2], [WIDTH+1.0, 0.0], [WIDTH+1.0, HEIGHT] ) if ( s > 0.0 ): return s if ( y1 < 0.0 ) or ( y2 < 0.0 ): s = intersect( [x1, y1], [x2, y2], [0.0, 0.0], [WIDTH, 0.0] ) if ( s > 0.0 ): return s if ( y1 > HEIGHT ) or ( y2 > HEIGHT ): s = intersect( [x1, y1], [x2, y2], [0.0, HEIGHT], [WIDTH, HEIGHT] ) if ( s > 0.0 ): return s return float( -1.0 ) # Plot a collection of line segments def plot( points, color='black' ): # First line segment s = clip( points[0][0], points[0][1], points[1][0], points[1][1] ) if ( s < 0.0 ): p = 'M %f,%f' % ( points[0][0], points[0][1] ) else: p = 'M %f,%f' % ( points[0][0] + s * ( points[1][0] - points[0][0] ), points[0][1] + s * ( points[1][1] - points[0][1] ) ) x0 = points[1][0] y0 = points[1][1] p += ' L %f,%f' % ( x0, y0 ) # Intermediate line segments for i in range(2, len( points ) - 1): x0 = points[i][0] y0 = points[i][1] p += ' L %f,%f' % ( x0, y0 ) # Final line segment x = points[-1][0] y = points[-1][1] s = clip( x0, y0, x, y ) if ( s < 0.0 ): p += ' L %f,%f' % ( x, y ) else: p += ' L %f,%f' % ( x0 + s * ( x - x0 ), y0 + s * ( y - y0 ) ) print '' % ( color, p ) # Draw the vertical elements def vertical( x, y, color, down, up ): if ( y > ( scale + epsilon ) ): i = len( down ) - 1 while ( y > ( scale + epsilon) ): x -= down[i][0] y -= down[i][1] i -= 1 if ( i < 0 ): i = len( down ) - 1 else: i = -1 points = [[x, y]] while ( y < ( HEIGHT - epsilon ) ): i += 1 if ( i >= len( down ) ): i = 0 x += down[i][0] y += down[i][1] points.append( [x, y] ) plot( points, color ) x += DU_switch[i] points = [[x, y]] while ( y > epsilon ): x += up[i][0] y += up[i][1] points.append( [x, y] ) i -= 1 if ( i < 0 ): i = len( up ) - 1 plot( points, color ) # Draw the horizontal elements def horizontal( x, y, color, l2r, r2l ): if ( x > ( scale + epsilon ) ): i = len( l2r ) - 1 while ( x > ( scale + epsilon ) ): x -= l2r[i][0] y -= l2r[i][1] i -= 1 if ( i < 0 ): i = len( l2r ) - 1 else: i = -1 points = [[x, y]] while ( x < ( WIDTH - epsilon ) ): i += 1 if ( i >= len( l2r ) ): i = 0 x += l2r[i][0] y += l2r[i][1] points.append( [x, y] ) plot( points, color ) y += LR_switch[i] points = [[x, y]] while ( x > epsilon ): x += r2l[i][0] y += r2l[i][1] points.append( [x, y] ) i -= 1 if ( i < 0 ): i = len( r2l ) - 1 plot( points, color ) print '<svg>' % ( int( WIDTH ), int( HEIGHT ) ) print '<g>' Color = 'green' x1 = 0.0 y1 = 0.0 x2 = 1.5 * scale y2 = 1.5 * scale while ( x1 < ( WIDTH - epsilon ) ): vertical( x1, y1, 'green', DOWN, UP ) if ( x2 < ( WIDTH - epsilon ) ): vertical( x2, y2, 'green', DOWN, UP ) x1 += 3 * scale x2 += 3 * scale print '</g>' print '<g>' x1 = 0.0 y1 = 0.0 x2 = 1.5 * scale y2 = 1.5 * scale while ( y1 < ( HEIGHT - epsilon ) ): horizontal( x1, y1, 'blue', L2R, R2L) if ( y2 < ( HEIGHT - epsilon ) ): horizontal( x2, y2, 'blue', L2R, R2L) y1 += 3 * scale y2 += 3 * scale print '</g>' print '<g>' print '' % ( int( WIDTH ) ) print '' % ( int( HEIGHT ), int( WIDTH ) ) print '</g>' print '</svg>' А вот получившееся изображение уже на яйце: Энтузиасты создают даже картинки со стробоскопическим эффектом при вращении: При создании своего яйцебота я не ставил перед собой цели уложиться в $15, но так уж вышло :). Для сравнения оригинальный Eggbot Pro стоит $325, что дороже на порядок. Основная стоимость любого яйцебота — шаговые двигатели. Я использовал самые доступные — 28BYJ-48-12V, отсюда и итоговый ценник в 15 баксов. Итак для приготовления моего яйцебота вам понадобится: 1. 110 грамм пластика ABS или PLA. Черные детали я печатал ABS-ом, желтые PLA. Уж больно PLA красив при печати на стекле 🙂 2. Электроника в ассортименте:
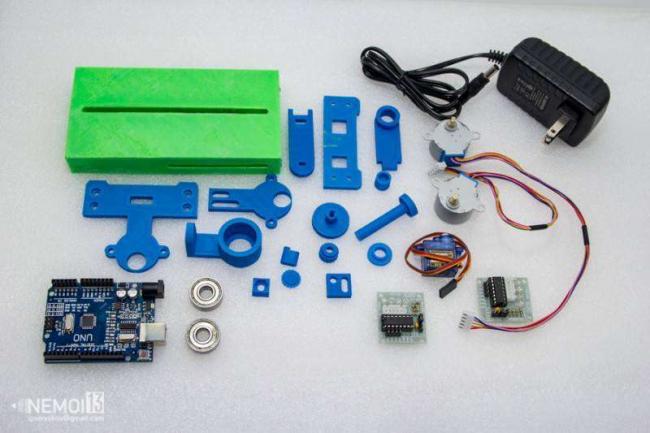
Энтузиасты создают даже картинки со стробоскопическим эффектом при вращении: При создании своего яйцебота я не ставил перед собой цели уложиться в $15, но так уж вышло :). Для сравнения оригинальный Eggbot Pro стоит $325, что дороже на порядок. Основная стоимость любого яйцебота — шаговые двигатели. Я использовал самые доступные — 28BYJ-48-12V, отсюда и итоговый ценник в 15 баксов. Итак для приготовления моего яйцебота вам понадобится: 1. 110 грамм пластика ABS или PLA. Черные детали я печатал ABS-ом, желтые PLA. Уж больно PLA красив при печати на стекле 🙂 2. Электроника в ассортименте:
- 1 x Китайская Arduino UNO c Aliexpress с кабелем для компа за 250 руб.
- 2 x 28BYJ-48-12V Шаговый двигатель + ULN2003 Драйвер шагового двигателя за 100 руб.
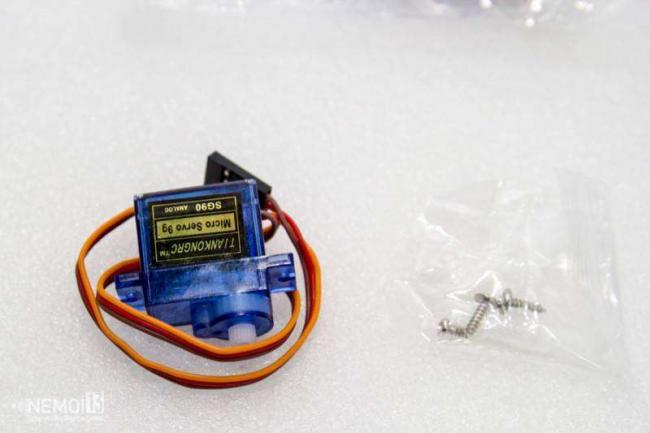
- 1 x SG90 Микро серво двигателььза 100 руб.
- 1 x 12V Блок питания (можно и не покупать если есть).
3. То что не можем напечатать, но можем купить почти в любом хозяйственном магазине:
- пружина.
- болты, винты, гайки, шайбы.
- резиновая прокладка (можно и напечатать, если у вас есть Flex).
- подшипник 608.
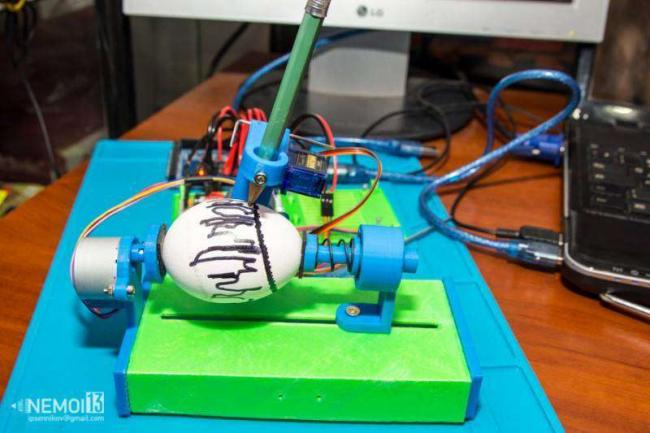
Пластик засовываем в 3Д принтер и печатаем детали, модели которых я заботливо поместил сюда. Подробно о том чего и сколько печатать, где конкретно взять электронику, сколько и каких болтов надо смотрим тут. Тем кто еще не приобрел 3Д принтер, но очень хочет приготовить своего яйцебота я могу напечатать все детали и отправить почтой. Обращайтесь в личку, все будет в лучшем виде! Я гарантирую это! После печати можно приступить к сборке. Сборка устройства выглядит примерно так: Для того, чтобы у вас все получилось я потратил много времени и подготовил инструкцию по сборке и подключению электроники в картинках. Скачать инструкцию можно тут. После печати и сборки у вас должно получиться такое устройство: После окончания сборки, в яйцебота нужно поместить прошивку. Так, как мозгом устройства является обычная ардуино, у вас не должно возникнуть с этим проблем.
- Скачиваем и распаковываем прошивку отсюда.
- Загружаем Arduino IDE, устанавливаем и запускаем.
- Подключаем яйцебота к компьютеру, выбираем в Arduino IDE модель платы и COM порт.
- Открываем файл Eggduino.ino из папки с прошивкой и загружаем ее в Arduino.
В качестве управляющей программы используется всем известный Inkscape с плагином, написанным Evil Mad Scientist Laboratories. Плагин позволяет настраивать яйцебота, управлять им вручную и отправлять картинки на печать. Я заботливо добавил плагин в Inkscape и поместил готовый архив тут. Если у вас уже есть Inkscape, но нет плагина, то взять его отдельно можно тут. Скачиваем, устанавливаем и запускаем Inkscape. Идем в меню с плагинами, ищем там подменю EggBot. Открываем плагин, настраиваем высоту поднятия фломастера и печатаем на яйце все что угодно. Если у вас Inkscape при попытке управления ботом выдаёт ошибку «Failed to connect to EggBot», то не отчаивайтесь. Проблему можно легко решить. Посмотрите в списке подключенного оборудования, то как называется ваша плата. Затем в файле ebb_serial.py плагина для Inkscape замените в строке 52 текст «USB-SERIAL CH340» на ваше название. Еще я собрал и выложил небольшую коллекцию с примерами. Посмотреть ее можно тут. В итоге яйцебот должен работать так: Свой проект я разместил на гитхаб. Форкаем, ставим звездочки, модифицируем и так далее. Про thingiverse.com тоже не забыл. Спасибо за внимание!






Яйцебот Сфер-O-бот (Sphere-O-Bot, eggbot MOD) является проектом с открытыми исходниками железа и программного обеспечения. Проект является модификацией знаменитого EggBot от компании Evil Mad Scientist, которые делают очень хороших роботов.
Список деталей
Для печати на 3Д Принтере:
1 x Держатель пружины 1 x Рама (с поддержкой) 1 x Поддержка яйца вариант 1 или вариант 2 1 x Держатель маркера 2 x Осевая поддержка 1 x Вертикальная фаланга вариант 1 или вариант 2 1 x Разделитель
Электроника и другие детали:
2 x 623zz подшипник тут 1 x Шпилька (3 мм диаметр, 80 мм длина) 1 x Пружина (4,5 мм диаметр, 10 мм длина) тут 2 x Шаговый двигатель NEMA 17 (40 мм длина) тут 1 x Серводвигатель SG90 тут 1 x Arduino Leonardo тут и плату автора xjjRobots Brain Shield. Вместо платы автора можно использовать CNC Shield v3 тут и Arduino UNO тут этот вариант дешевле и доступней 2 x Драйвер шагового двигателя A4988 тут 1 x Блок питания 12v/2A тут 11 x Болт M3x6 тут 4 x Болт M3x12 тут 4 x Гайка M3 тут 2 x Присоска 20 мм тут 1 x Барашковая гайка M3 тут
Инструкция по сборке
1. Общая схема сборки
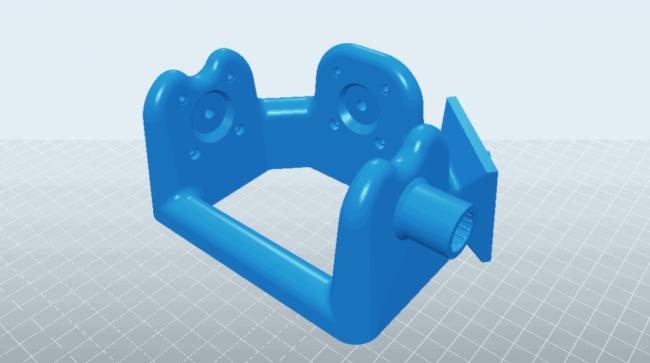
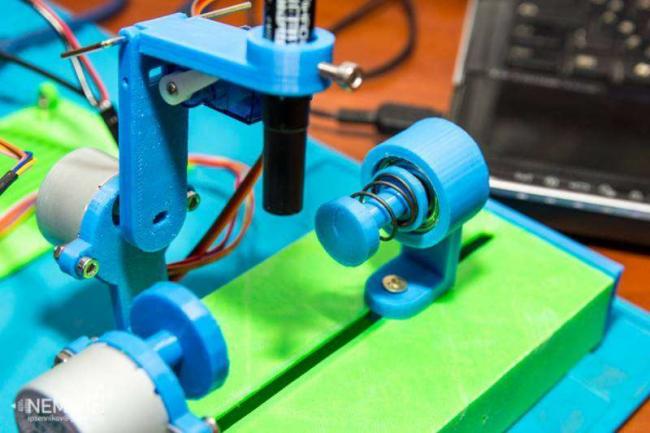
Этот яйцебот имеет держатель маркера, который поворачивается шаговым двигателем. Другой шаговый двигатель отвечает за поворот яйца или другого шарообразного объекта вокруг своей оси. Чтобы яйцо было надежно закреплено используются присоски. Одна присоска закреплена на шаговом двигателе поддержки яйца. Другая присоска закреплена на шпильке с другой стороны. Небольшая пружина будет толкать присоску и надежно удерживать яйцо в то время, когда на нем рисует маркер. Чтобы маркер мог подниматься и опускаться в нужных местах используется серводвигатель SG90. Сама рама, на которой крепятся все детали показана ниже.
Общая схема сборки яйцебота
 Умный дом на базе Ардуино: пошаговая инструкция по сборке
Умный дом на базе Ардуино: пошаговая инструкция по сборке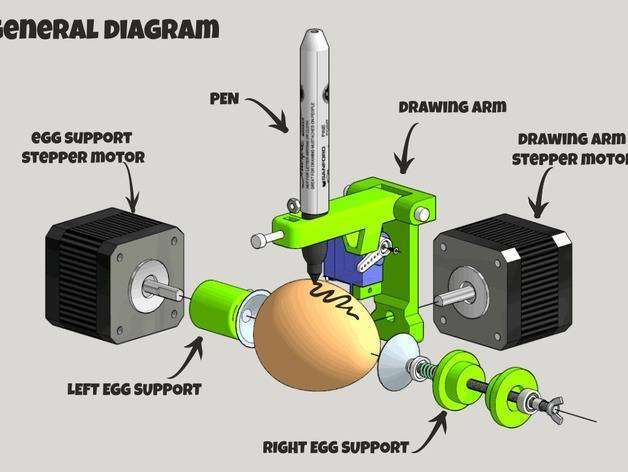
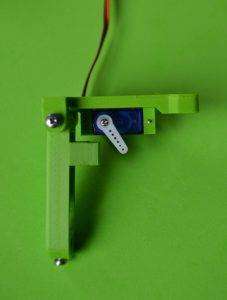
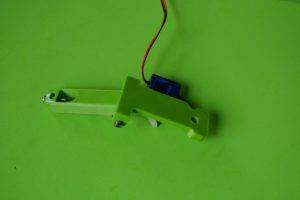
2. Сборка держателя маркера и левой поддержки яйца
Используя два винта закрепите серодвигатель SG90 к детали, как показано на картинке выше.
Поместите гайку М3 внутри отверстия и вкрутите в нее один 16 мм болт. Сделайте то же самое для держателя держателя яйца. Петля для сустава держателя маркера делается при помощи 2-х 16мм болтов М3. Эта петля должна свободно вращаться после того, как эти два болта будут завинчены.
Ниже приведены 3 фотографии держателя маркера в уже собранном виде.
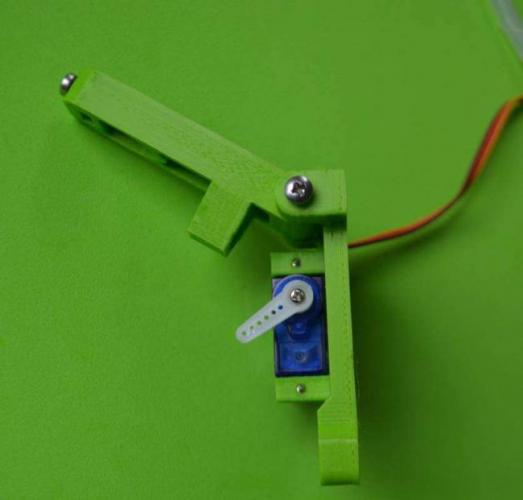
3. Крепление шаговых двигателей и сборка оси Х
Закрепите оба шаговых двигателей к основной раме с помощью 8 х 16мм M3 болтов. Это довольно просто.
Вверху: Схема сборки оси X (шпилька длиной 80 мм, М3). Поместите все элементы, как показано на рисунке выше.
После сборки ось X должна выглядеть так:
 Весы Xiaomi: обзор лучших моделей
Весы Xiaomi: обзор лучших моделей4. Разместите все в нужном месте
Выше: Вставьте собранный держатель маркера в ось шагового мотора. Помните, что на рисунке не показана рама, в которой шаговый мотор закреплен. Надежно закрепите.
Установите левую поддержку яйца в ось шагового двигателя.
Выше: так должен выглядеть яйцебот сверху теперь.
Еще раз проверьте по схеме выше, что вы установили все правильно. маркер и яйцо есть на картинке только для примера, вставлять их пока не нужно.
ПРИМЕЧАНИЕ: держатель маркера требует некой калибровки. В процессе калибровки нужно будет еще раз установить угол. Это делается очень легко.
Выше. Общая схема вид спереди. Опять же рама не показана.
5. Электроника + кабели. Как подключить все.
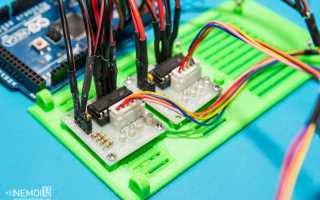
Почти все готово. Возьмите JJrobots Brain Shield (или CNC Shield), Arduino Leonardo и 2 драйвера шагового двигателя. Соедините все, как показано на рисунке ниже. Дважды проверьте ориентацию драйверов шагового двигателя иначе при включении они сгорят.
Закрепите электронику на задней стороне рамы яйцебота с помощью 6мм болтов М3 (2-х достаточно).
 Обзор Xiaomi Smart Scale 2: как всегда круто и как всегда - ничего нового
Обзор Xiaomi Smart Scale 2: как всегда круто и как всегда - ничего новогоВнизу: вид сверху уже закрепленной электроники.
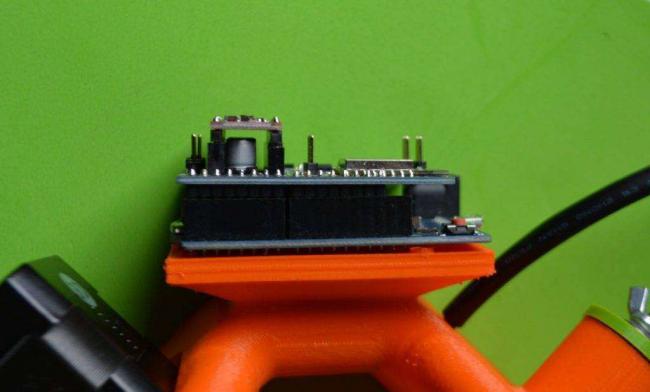
Подключите кабели, как показано выше. Проверьте полярность ДВАЖДЫ!
6. Заливка прошивки
Заливка прошивки на Arduino Leonardo осуществляется с помощью Arduino IDE (v 1.6.5). Это очень просто: 1) Загрузите Arduino IDE (v 1.6.5) отсюда: www.arduino.cc/en/Main/Software. И установите его на свой компьютер. 2) Подключите плату Arduino Leonardo кабелем к USB порту своего компьютера. 3) Запустите Arduino IDE. Выберите плату Arduino Leonardo и COM порт в меню «tools->board»… 4) Откройте и загрузите в плату прошивку яйцебота. Прошивка тут загрузите ее и распакуйте все файлы в папку «Ejjduino_ARDUINO».
Инструкция по использованию
Программное обеспечение
Для черчения Яйцеботом на яйцах вам понадобится бесплатный векторный редактор Inkscape (тут) и расширение для него Eggbot Control (тут).
Расширение Eggbot Control для Inkscape является инструментом, который вы будете использовать, для проверки и выравнивания Яйцебота, а также передачи ваших рисунков на яйца.
Сначала вам нужно установить Inkscape. После того, как Inkscape работает, в меню Extensions будет подменю Eggbot. Если вы не видите подменю Eggbot, значит вы еще не установили расширение.
В подменю Eggbot есть несколько пунктов, которые выполняют различные задачи. Наиболее важным пунктом является Eggbot Control…, который запускает расширение, непосредственно взаимодействующее с Яйцеботом. Диалог Eggbot Control имеет восемь вкладок. На первых двух вкладках «Plot» и «Setup» расположены основные элементы управления и настройки Яйцебота. На остальных шести вкладках расположено множество дополнительных функций.
Plot — Эта вкладка используется для передачи рисунка из Inkscape к Яйцеботу.Setup — Используйте эту вкладку, чтобы откалибровать верхнюю и нижнюю границу маркера, или войти в режим выравнивания (где двигатели выключены, и маркер убран вверх).Timing — Эта вкладка позволит вам изменить некоторые значения временных параметров для действий Яйцебота.Options — Эта вкладка позволит вам настроить некоторые из поведений Яйцебота.Manual — Эта вкладка позволит вам управлять вручную Яйцеботом (вращение двигателей, поднимание / опускание пера и т.д.)Resume — На этой вкладке описывается, как сделать паузу и как возобновить черчение.Layers — Эта вкладка даст вам возможность для построения многослойных рисунков (для многоцветных).`*` — Эта вкладка отображает информацию о версии расширения Eggbot и иногда примечания к выпуску.
Подготовка Яйцебота для черчения на яйце
Как только вы все соберете и загрузите, то сразу захотите поставить маркер в держатель, закрепить яйцо и начать рисовать. Это отличный способ все испортить и разбить яйцо. Чтобы этого не случилось вам нужно закрепить яйцо так, чтобы оно равномерно вращалось и кончик маркера имел бы нормальный контакт со всей площадью яйца во время вращения.
Чтобы сделать это, выполните следующие действия:
1. Выполните калибровку позиции маркера вверх/вниз.
- Это является частью первоначальной настройки, вам не придется делать это каждый раз.
- На вкладке Setup, выберите «Toggle pen up/down», как указано в (3) выше. Затем нажмите кнопку Apply несколько раз. Серводвигатель должен двигаться вперед и назад между двумя различными позициями.
Если серводвигатель не двигается, проверьте, что он правильно подключен к Arduino и что само Arduino подключено к внешнему питание, а кабель USB подключен к компьютеру.
После этого вам нужно подогнать два процентных значения ((1) и (2), отмеченных выше) для маркера, соответствующих положению вверх и вниз таким образом, чтобы:
- Держатель маркера был примерно горизонтально, или чуть ниже в положении «вниз»
- Держатель маркера был немного выше горизонтальной плоскости, в положении «вверх»
Как правило, вам нужно добиться, около 5 мм общего хода между этими двумя положениями. Этот диапазон может соответствовать лишь нескольким процентам разницы между «вверх» и «вниз» позиций.
2. Настройте моторы.
На вкладке Setup, выберите «Raise pen, turn off motors», а затем нажмите кнопку Apply. Это позволит разблокировать моторы и их можно свободно вращать в любом направлении, чтобы правильно закрепить маркер над яйцом.
Крепление яйца в Яйцеботе
Подготовка чертежа
Лучше всего начать с документом размера 800 пикселей в высоту на 3200 пикселей в ширину. Для начала вы можете попробовать один из готовых примеров (тут). Сфера-O-бот рисует Path — сплошные линии — не растровые изображения. Определенные типы объектов автоматически рассматриваются как Path, например, круги и прямоугольники. Другие типы объектов, которые сделаны из линий, такие как, например, контурный текст, должны быть преобразованы в Path (Path menu > Object to path) перед черчением.
Печать на яйце
Автор проекта: jjrobots Рама для этого проекта была разработана: Attila Nagy.

- Цена: 38.82$
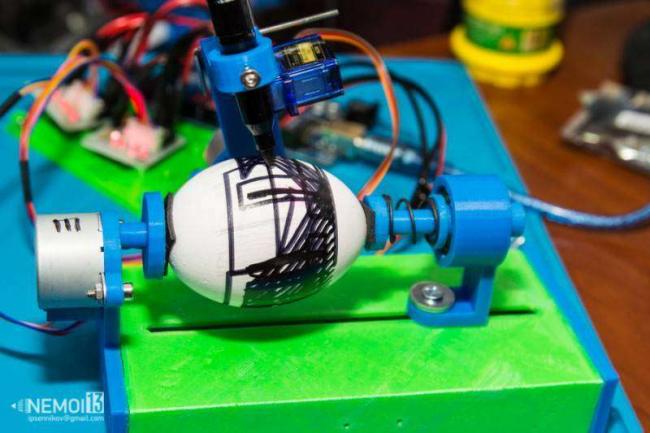
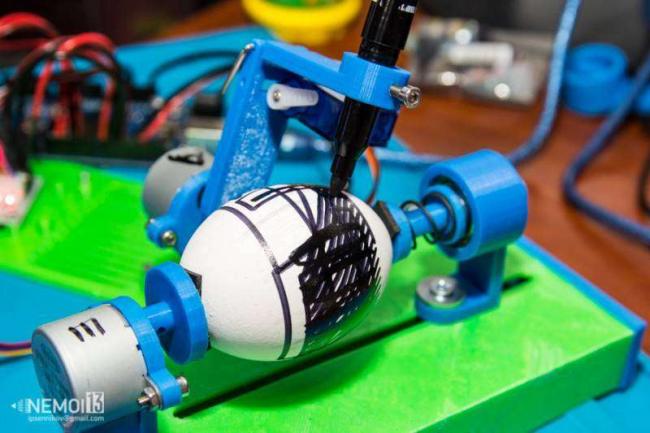
В последнее время на муське стали всё чаще появляться обзоры на товары, купленные на таобао. Я тоже решил, что хочу освоить этот всемирно известный магазин. И решил я это освоение совместить с моей дальней хотелкой. Поэтому я пошел на тао уже с готовым списком товаров, который приведу чуть ниже. И в итоге закупил всё что нужно для создания в домашних условиях станка по разрисовыванию яиц, а также любых других сферических предметов (шариков, мячиков и тд) далее я буду называть его яйцебот. Этот обзор будет несколько отличаться от всех моих предыдущих обзоров. Но думаю вам, мои читатели, он понравится. Итак, начнём с теории. Что такое яйцебот (eggbot)? Для тех, кто не в курсе яйцебот — это машина (ЧПУ-станок), которая обычным фломастером (карандашомручкойкистью) умеет рисовать на любых сферических объектах: яйцах, теннисных шариках, ёлочных игрушках. Концепт механизма придумал дизайнер Bruce Shapiro в далеком 1990-м году, а не так давно знаменитая компания Evil Mad Scientist Laboratories выпустила в свободную продажу свою версию под названием The EggBot. Надо отдать должное Evil Mad Scientist Laboratories свой проект сделала открытым и разрешает пользоваться программным обеспечением для других яйцеботов даже в коммерческих проектах. C помощью яйцебота можно делать вот такие рисунки:




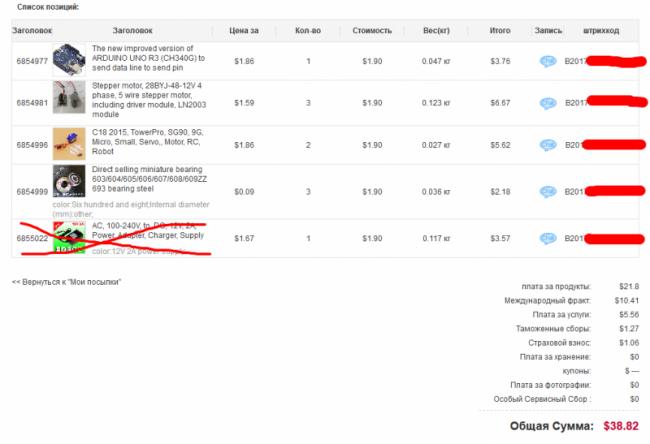 Но как видим, комплектующих я брал с запасом. +1 шаговый двигатель, +1 серводвигатель и +1 подшипник. (кстати моей ошибкой было то, что я не взял +1 Arduino UNO, что в последствии доставило мне много лишних хлопот) Как пользоваться услугами посредника yoybuy.com рассказывать не буду. Там всё довольно просто и понятно. И в целом я остался доволен этим посредником. Сейчас формирую новый заказ, но о нём пока рассказывать не буду. Весь комплект добирался до меня почти 30 дней. На почте получил хорошо упакованную коробку:
Но как видим, комплектующих я брал с запасом. +1 шаговый двигатель, +1 серводвигатель и +1 подшипник. (кстати моей ошибкой было то, что я не взял +1 Arduino UNO, что в последствии доставило мне много лишних хлопот) Как пользоваться услугами посредника yoybuy.com рассказывать не буду. Там всё довольно просто и понятно. И в целом я остался доволен этим посредником. Сейчас формирую новый заказ, но о нём пока рассказывать не буду. Весь комплект добирался до меня почти 30 дней. На почте получил хорошо упакованную коробку: И внутри вся электроника для будущего станка:
И внутри вся электроника для будущего станка:

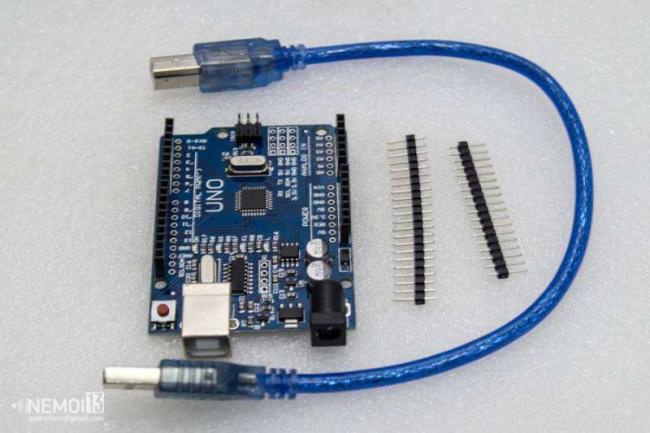
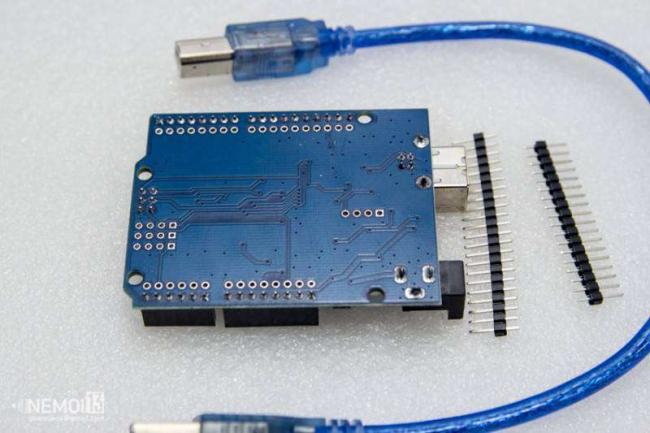


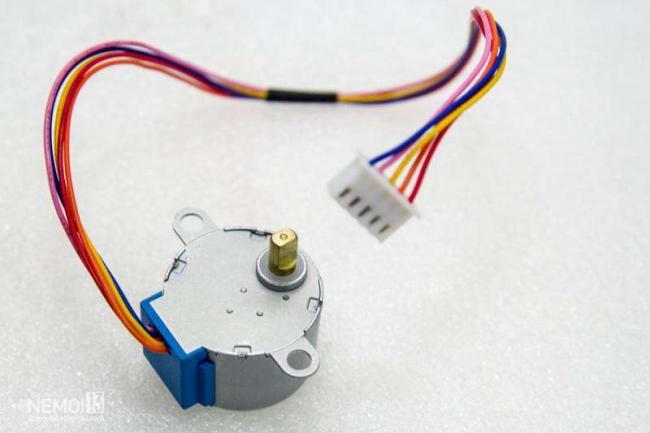








 Они абсолютно идентичные:
Они абсолютно идентичные: Блок питания на 12V. 2А. В моем проекте он не используется. Потому что я использую шаговые двигатели на 5V. Блок питания был взят для другого проекта:
Блок питания на 12V. 2А. В моем проекте он не используется. Потому что я использую шаговые двигатели на 5V. Блок питания был взят для другого проекта: В комплекте к блоку питания в подарок лежала открывашка:
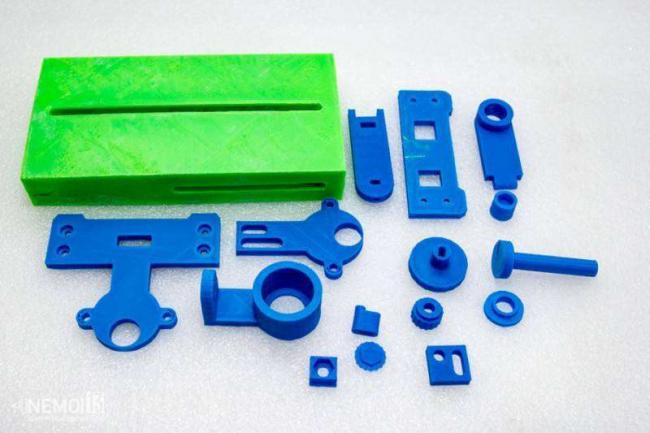
В комплекте к блоку питания в подарок лежала открывашка: (я правда пиво не пью, поэтому задарил её брату в этот же день) Также для проекта я напечатал детали на своём 3Д принтере следующий список деталей:1 x 0000001. Нижняя крышка корпуса1 x 0000002. Верхняя крышка корпуса1 x 0000003. Логотип2 x 0000004. Держатель гайки М41 x 0000005. Правая ось поддержки яйца1 x 0000006. Держатель пружины1 x 0000007. Держатель правой оси1 x 0000008. Фиксатор оси поддержки2 x 0000009. Держатель болта М4 низ2 x 0000010. Держатель болта М4 верх1 x 0000011. Держатель левой оси1 x 0000012. Левая ось поддержки яйца1 x 0000013. Держатель руки маркера1 x 0000014. Направляющая держателя руки маркера1 x 0000015. Корпус направляющей1 x 0000016. Рука маркера H1 x 0000017. Рука маркера V1 x 0000018. Правая крышка корпуса
(я правда пиво не пью, поэтому задарил её брату в этот же день) Также для проекта я напечатал детали на своём 3Д принтере следующий список деталей:1 x 0000001. Нижняя крышка корпуса1 x 0000002. Верхняя крышка корпуса1 x 0000003. Логотип2 x 0000004. Держатель гайки М41 x 0000005. Правая ось поддержки яйца1 x 0000006. Держатель пружины1 x 0000007. Держатель правой оси1 x 0000008. Фиксатор оси поддержки2 x 0000009. Держатель болта М4 низ2 x 0000010. Держатель болта М4 верх1 x 0000011. Держатель левой оси1 x 0000012. Левая ось поддержки яйца1 x 0000013. Держатель руки маркера1 x 0000014. Направляющая держателя руки маркера1 x 0000015. Корпус направляющей1 x 0000016. Рука маркера H1 x 0000017. Рука маркера V1 x 0000018. Правая крышка корпуса 

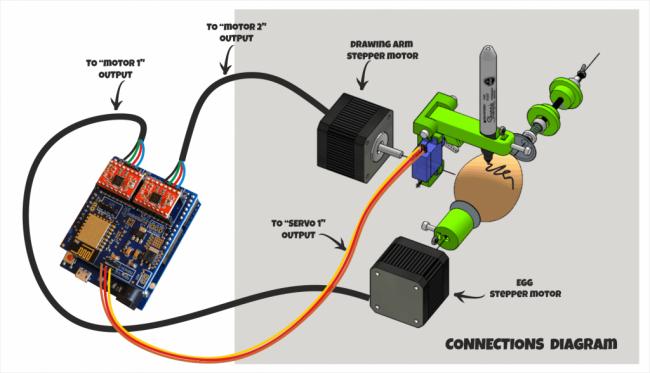
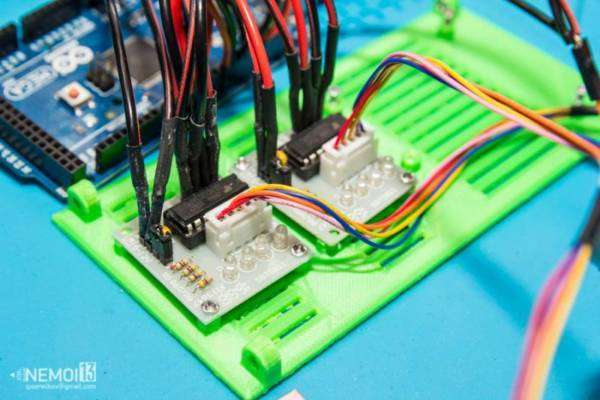
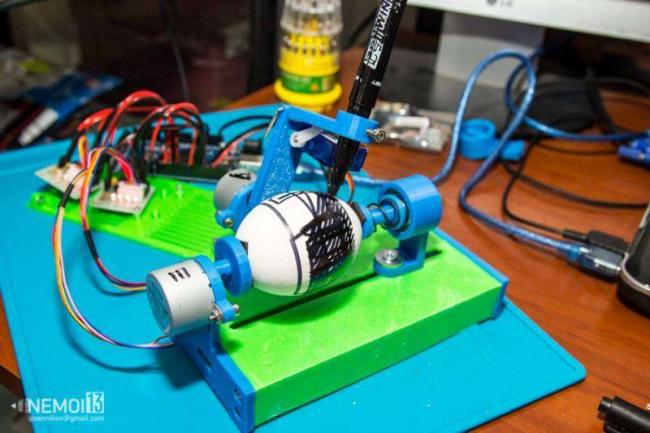
 (еще раз напомню что блок питания нужен только если вы будете использовать шаговые двигатели на 12V) Честно признаюсь, что процесс сборки яйцебота я благополучно забыл сфотографировать. Собирал по имеющейся инструкции. Электронику подключал по следующей схеме:
(еще раз напомню что блок питания нужен только если вы будете использовать шаговые двигатели на 12V) Честно признаюсь, что процесс сборки яйцебота я благополучно забыл сфотографировать. Собирал по имеющейся инструкции. Электронику подключал по следующей схеме: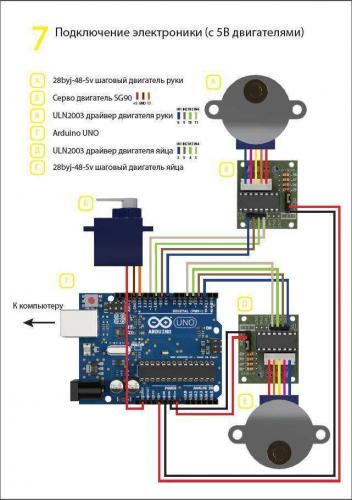 Для работы яйцебота нам нужно скачать и залить в arduino прошивку. И скачать и установить на компьютер программу inkscape с уже встроенным плагином eggbot. Для использования её в качестве управляющей программы. Я всё это сделал. НО! В процессе выяснилось, что пришедшая Arduino UNO пришла ко мне без залитого бутлодера.
Для работы яйцебота нам нужно скачать и залить в arduino прошивку. И скачать и установить на компьютер программу inkscape с уже встроенным плагином eggbot. Для использования её в качестве управляющей программы. Я всё это сделал. НО! В процессе выяснилось, что пришедшая Arduino UNO пришла ко мне без залитого бутлодера. Поэтому залить в неё прошивку не получалось:
Поэтому залить в неё прошивку не получалось: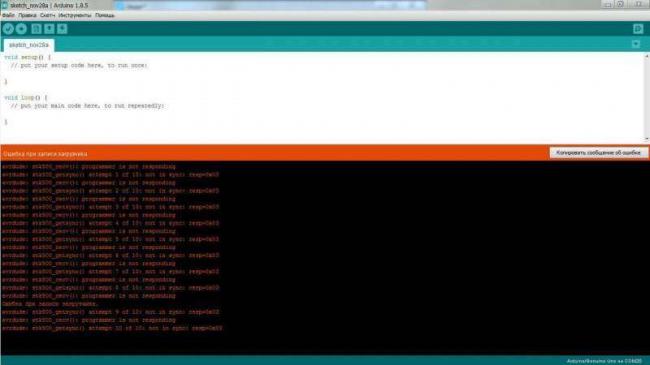 В Arduino IDE она определяться отказывалась:
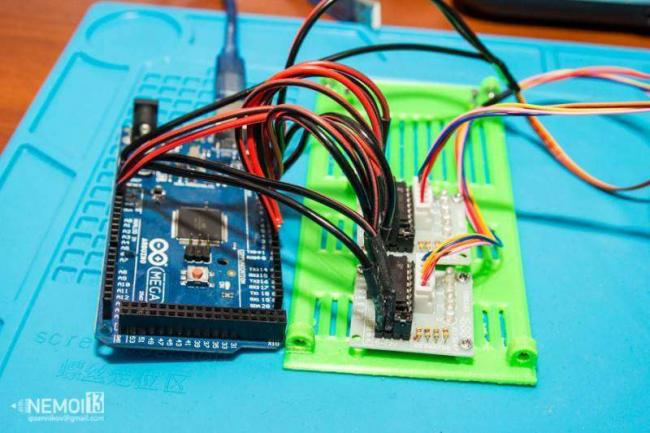
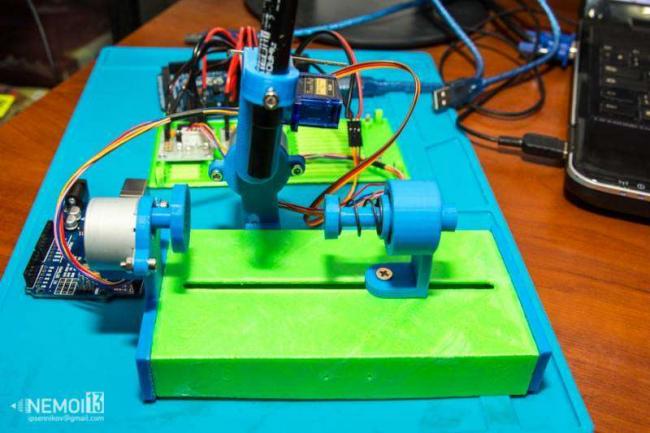
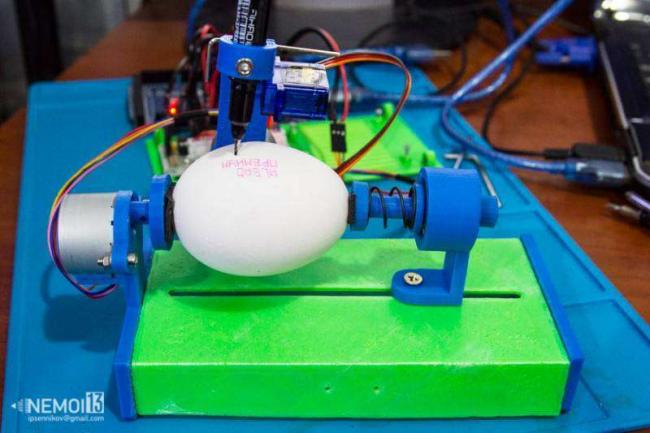
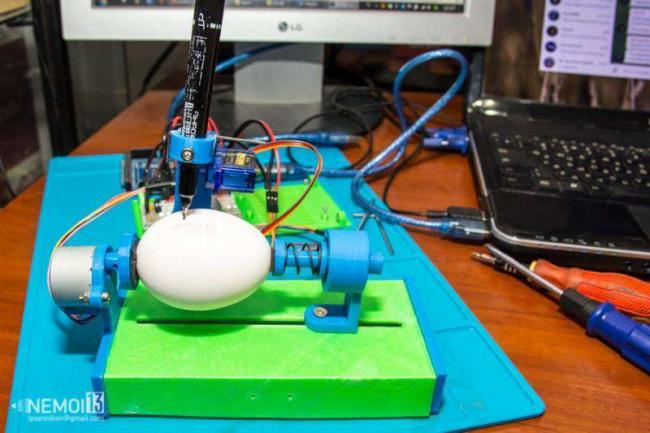
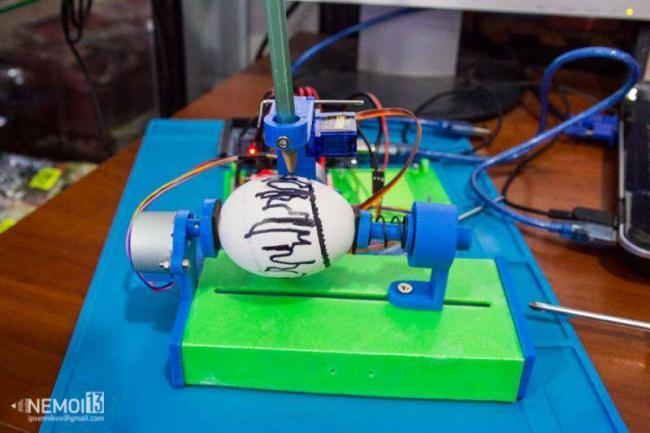
В Arduino IDE она определяться отказывалась: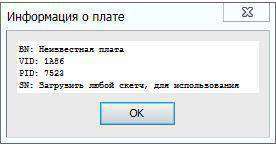 И даже попытка прошить плату, используя в качестве ISP-программатора другую Arduino UNO ни к чему не привела: (За неработающую ардуину, посредник yoybuy.com уже вернул мне деньги на внутренний счёт в моём аккаунте, что еще раз подтверждает серьёзность данной конторы) Очень жалко, но так как руки чешутся, собрать яйцебот хочется, пришлось вместо Arduino UNO использовать имеющийся у меня arduino MEGA. В корпус она уже не влезет, но по крайней мере будет работать, пока другая Arduino UNO будет ехать ко мне с Китая. Но просто так прошивка для UNO заливаться в MEGA не будет. Для желающих повторить, нужно сделать поправку в коде:Нужно заменить строчку SPMCSR &= ~SELFPRGEN; на SPMCSR &= ~SPMEN; После этого уже прошивка нормально загружается в arduino MEGA и яйцебот готов к работе. Правда имеет вид не очень эстетичный:
И даже попытка прошить плату, используя в качестве ISP-программатора другую Arduino UNO ни к чему не привела: (За неработающую ардуину, посредник yoybuy.com уже вернул мне деньги на внутренний счёт в моём аккаунте, что еще раз подтверждает серьёзность данной конторы) Очень жалко, но так как руки чешутся, собрать яйцебот хочется, пришлось вместо Arduino UNO использовать имеющийся у меня arduino MEGA. В корпус она уже не влезет, но по крайней мере будет работать, пока другая Arduino UNO будет ехать ко мне с Китая. Но просто так прошивка для UNO заливаться в MEGA не будет. Для желающих повторить, нужно сделать поправку в коде:Нужно заменить строчку SPMCSR &= ~SELFPRGEN; на SPMCSR &= ~SPMEN; После этого уже прошивка нормально загружается в arduino MEGA и яйцебот готов к работе. Правда имеет вид не очень эстетичный: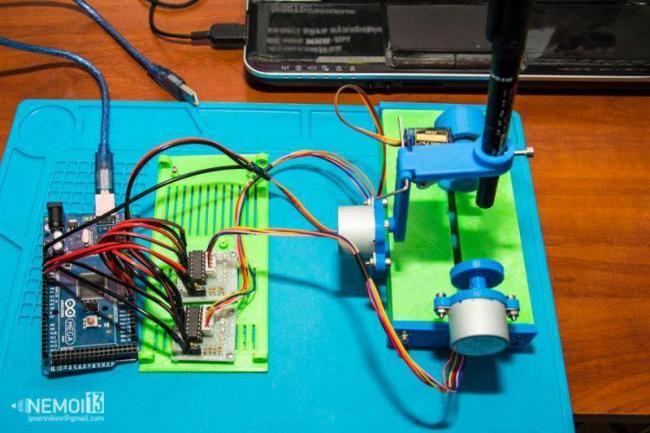





- https://habr.com/post/403293/
- https://3dhobbies.ru/eggbot-mod/
- https://mysku.ru/blog/taobao/58395.html
 Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress
Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).
НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ). Что такое Ардуино? Это свобода для изобретателя
Что такое Ардуино? Это свобода для изобретателя ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ