
- Цена: US $8.89
Опять я, к вам со своими обзорами, по ЧПУ. Ну мало ли, может кому и интересно будет, про ЧПУ строение. Для начала кто не знает, или просто знает такие слова, как контролер, драйвер и опторазвязка. В чем их отличие? Контролер, есть универсальный, на несколько осей, обычно под небольшие токи, на нем и опторазвязку обычно ставят, релюхи всякие и т.д. и т.п. Универсальный стоит подороже и если что полетит, то трудней причину искать будет. Есть более простой контролер, там отсутствуют драйвера. Так как двигатели могут разной мощности быть, ну и под них разные драйвера. Так же на осях различных могут шаговые движки разные стоять. На разный ток. То есть драйвер. самый нам нужный, чтобы ШД управлять. Там обычно перемычками, переключателями мы и выставляем ток и микрошаг для ШД. Сейчас драйвера идут почти сплошь, уже с оптронами, то есть с опторазвязкой. Но кто не знает, по привычке покупает, контролер с опторазвязкой на нем, а к ним уже драйвера подключает. Я тоже кстати сглупил, заказал такой. Он по хорошему не сильно то и нужен. Раб. поле я свое знаю, поэтому детали сразу под него разрабатываю. Конечники не сильно и нужны. Включение шпинделя, мне тоже как то не нужно. Кто его знает, глюканет там контролер и пока я фрезу на мощном фрезере меняю, он возьмет и включится. Пальцы как с куста, улетят. В общем теории немного, вам дал. Еще немного схемотехники по подключению драйверов на порты. Есть 2 такие основные схемы подключения.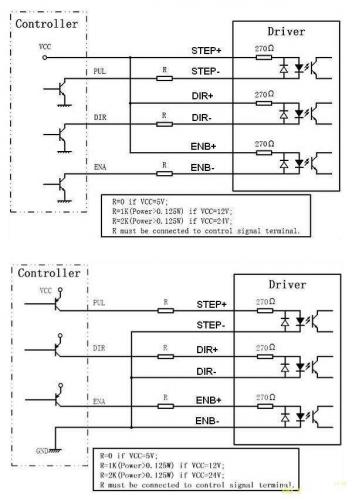 Китайцы в основном как один первую советуют. Но она не всегда срабатывает. Я уже писал обзор покупки TB6600, а на самом деле там оказалась TB67S109AFTG. Микруха намного мелкоскопичней чем первая. И по даташиту вроде как более слабая по току. Обзор мой здесь mysku.ru/blog/aliexpress/41551.html Там подробно вроде всё обсудили. Поэтому после него я опять заказал драйвера на TB6600, где уже наглядно на фото видно, что стоит именно эта микруха. Также выбирал, чтобы ток перемеником не накручивать, а то ошибка и спалить можно. Так как есть и такого исполнения, они немного подешевле будут. А есть закрытого типа, они подороже. Ну и радиатор там помощней. В общем описываю, что я заказал и получил. Продавец хороший, быстро отправил и через пару недель, получил на почте, хотя вроде по деньгам и недорого. Был нормальный трек, который всю дорогу бился. Границу как по маслу проскочил, а также таможню Екатеринбург. Даже удивительно, обычно там «черная яма». Видно от трека зависит. Пришло в сером пакете, хорошо замотанным скотчем, упаковкой с пупырушками и сами драйвера в картонных коробках, без всяких надписей. Картон хороший.
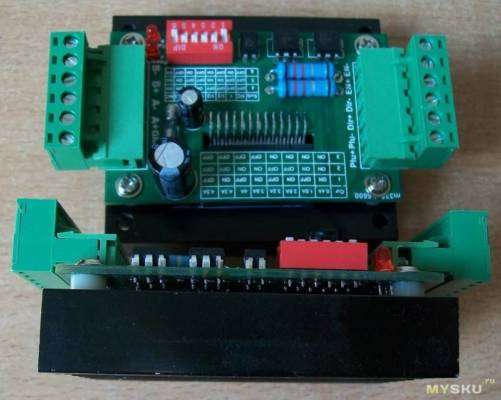
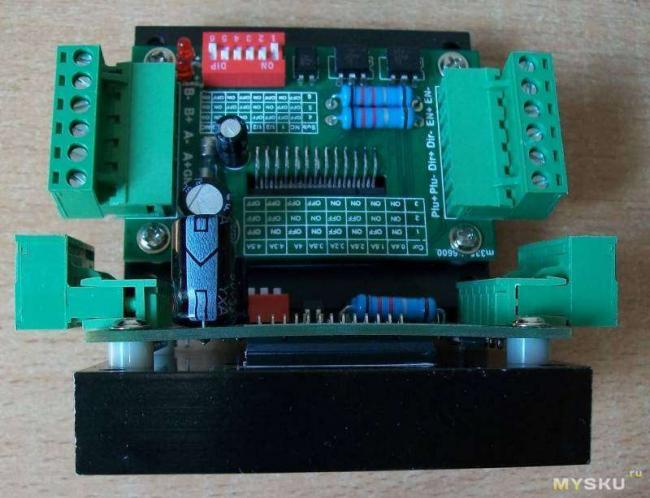
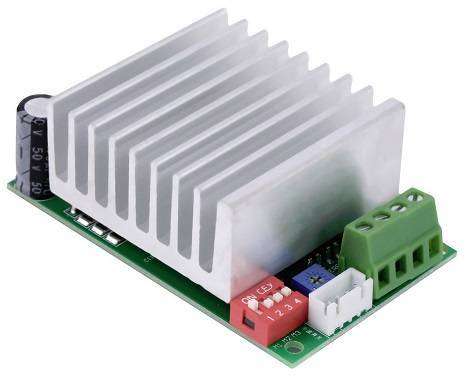
Китайцы в основном как один первую советуют. Но она не всегда срабатывает. Я уже писал обзор покупки TB6600, а на самом деле там оказалась TB67S109AFTG. Микруха намного мелкоскопичней чем первая. И по даташиту вроде как более слабая по току. Обзор мой здесь mysku.ru/blog/aliexpress/41551.html Там подробно вроде всё обсудили. Поэтому после него я опять заказал драйвера на TB6600, где уже наглядно на фото видно, что стоит именно эта микруха. Также выбирал, чтобы ток перемеником не накручивать, а то ошибка и спалить можно. Так как есть и такого исполнения, они немного подешевле будут. А есть закрытого типа, они подороже. Ну и радиатор там помощней. В общем описываю, что я заказал и получил. Продавец хороший, быстро отправил и через пару недель, получил на почте, хотя вроде по деньгам и недорого. Был нормальный трек, который всю дорогу бился. Границу как по маслу проскочил, а также таможню Екатеринбург. Даже удивительно, обычно там «черная яма». Видно от трека зависит. Пришло в сером пакете, хорошо замотанным скотчем, упаковкой с пупырушками и сами драйвера в картонных коробках, без всяких надписей. Картон хороший. Сами драйвера, неплохо выполненные. Пайка приличная. Емкость немного кривовато стояло на одном. Не стал выправлять. Термопасты под TB6600 тоже не пожалели, даже с лишком, ваткой лишнее убрал с боков. Для любителей рассматривать детали еще вид, крупно. Там и таблица переключателей, чтобы получать различные микрошаги и токи на драйвере. Ну и еще пару вам видов с боку.
Сами драйвера, неплохо выполненные. Пайка приличная. Емкость немного кривовато стояло на одном. Не стал выправлять. Термопасты под TB6600 тоже не пожалели, даже с лишком, ваткой лишнее убрал с боков. Для любителей рассматривать детали еще вид, крупно. Там и таблица переключателей, чтобы получать различные микрошаги и токи на драйвере. Ну и еще пару вам видов с боку.
Категорически приветствую всех читателей блога Live от iXBT!
Небольшой обзор драйверов TB6600 для шаговых двигателей 42/57/86.
Опять делюсь своим опытом приобретения товаров на китайской торговой площадке Taobao.
Я уже поднимал тему про посредника YOYBUY в прошлом обзоре.
Поэтому подробно останавливаться на выборе и заказе товаров на Таобао не буду (можно посмотреть в этом обзоре).
Для управления двигателями самосборных ЧПУ станков и 3D принтеров требуются специальные драйверы. Одни из самых распространенных – это дешевые драйверы типа TB6600/TB6560. И если TB6560 — это достаточно бюджетные драйверы, то TB6600 являются более продвинутыми как в плане настроек (ограничения тока, степпинг и т.п.), так и в плане мощности. Драйверы TB6600 позволяют управлять шаговыми двигателями типа 42/57/86 (это соответствует типоразмерам NEMA17/23/34) и выдают до 4.5А на обмотки.
Ссылка на Таобао: TB6600 в корпусе (¥23.80) и TB6600 без корпуса (¥27.50).
Тоже самое, но через посредника: TB6600 в корпусе ($3.78) и TB6600 без корпуса ($4.37). На Али подобное стоит около $10/шт. (за исключением ТВ6560, которые имеют более «слабые» характеристики, подешевле).
 Драйвер для Bluetooth адаптера из китая CSR 4.0
Драйвер для Bluetooth адаптера из китая CSR 4.0На рисунке TB6600 в корпусе (слева) и TB6600 без корпуса (справа).
Заказывал много, сразу под несколько проектов, так как выгоднее, чем на Али или в оффлайне.
Данные драйверы более мощные и имеют микростеппинг до 1/32, а также вполне подходят для 3D принтеров. Основное применение — работа в связке с шаговыми двигателями 42/57/86 в станках ЧПУ и прочих подобных самоделках.
Характеристики драйверов ТВ6600 (в корпусе)
- Рабочий ток/пиковый ток, до: 3.5А/4А
- Микрошаг: 32
- Импульсов на оборот: 6400
- Напряжение питания 9….42В постоянного тока.
- Масса: около 130 г
- Размеры: 96 х 56 х 35 мм
Это небольшой блок для монтажа в стойку/корпус, с двумя клеммными колодками. Корпус одновременно служит и радиатором охлаждения.
На корпусе нанесена таблица режимов работы
Устанавливаются режимы переключателями SW1-SW6 согласно таблице
Проверка массы (критично для большого заказа с Таобао)
Габаритные размеры 96 х 56 х 35 мм
 ЧПУ СТАНОК НА ARDUINO: ДВИГАТЕЛИ И ДРАЙВЕРЫ
ЧПУ СТАНОК НА ARDUINO: ДВИГАТЕЛИ И ДРАЙВЕРЫ

Для сравнения = рядом со вторым драйвером ТВ6600, который без корпуса.
Характеристики драйверов ТВ6600 (без корпуса)
- Рабочий ток/пиковый ток, до: 4.2А/4.5А
- Микрошаг: 16
- Импульсов на оборот: 3200
- Напряжение питания 8….45В постоянного тока.
- Масса: около 100 г
- Размеры: 82 х 50 х 35 мм
Внешний вид драйвера ТВ6600 (без корпуса).
Несмотря на отсутствие корпуса, охлаждение стоит эффективное. Это массивный радиатор, закрывающий практически полностью плату.
Проверка размеров (82 х 50 х 35 мм)
И массы
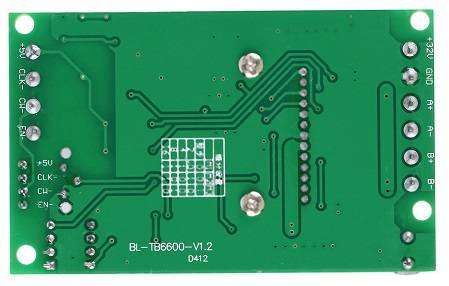
Обратная сторона платы
Под радиатором скрывается интегральный драйвер от Toshiba TB6600HG. Термопаста присутствует, а также гальваническая развязка на основе 6N137.
Для сравнения разберем и другой драйвер. Откручиваем винты корпуса, снимаем крышку.
 «Народный» налобный фонарь со встроенным зарядным модулем Skilhunt H03 RC
«Народный» налобный фонарь со встроенным зарядным модулем Skilhunt H03 RCСнимаем плату с радиатора
Внешний вид печатной платы драйвера
На фото повторители и развязка
В данном случае установлен драйвер, аналогичный Тошибе, но в другом корпусе SI09AFTG
Оптроны DP817C
В обоих случаях присутствует гальваническая (оптическая) развязка.
Маркировка выводов
Сравнение двух плат
Проведем небольшой тест драйверов.
Соберем небольшую схему с Arduino и двигателем Nema23 57HS8430.
Загрузим скетч в Ардуино
Спойлер Скетч для проверки.
}
В результате проверил все драйверы ТВ6600. Двигатель управляется, теперь можно продолжать сборку DIY проекта.
Ну и далее, драйверы будут смонтированы вместе с управляющей платой в небольшой настольный станок ЧПУ.
В целом покупка на Таобао комплектующих для различных самоделок оправдана, выгода по стоимости практически в два раза.
P.s. обратите внимание: в некоторых лотах есть платная местная доставка. Обычно это около $2. Имеет смысл покупать несколько лотов у одного продавца, стоимость местной доставки так и остается $2. В этом случае доставка «размазывается» по стоимости всего заказа.
Если есть вопросы по покупкам на Таобао или по посреднику Yoybuy — задавайте!
Спасибо за внимание!
![]() Статьи
Статьи ![]() 7
7 ![]() 30.11.2015
30.11.2015 ![]() 30.12.2017
30.12.2017
Содержание
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на замену популярному драйверу BL-TB6560-V2.0.Этот драйвер-контроллер подойдет для построения не только любительских систем ЧПУ, но и профессиональных, основаных на двигателях высокой мощности. Если сравнивать с предыдущим поколением драйвера TB6560AHG, то выходная мощность у TB6600HG возросла до 200Вт (как видим практическое удвоение по значению мощности), рабочее напряжение поднято с 35В (TB6560AHG) до 50В, рабочий ток увеличен до 4.5А (5А пиковое значение). Увеличена максимальная рабочая частота. Добавлены схемы защиты.
К основной «вкусности» данного драйвера можно отнести интеллектуальное управление током и использование ШИМ моделяции, благодаря чему есть возможность подключать к драйверу шаговые двигатели любого напряжения питания и тока — на установленном уровне микросхема сама ограничит максимальный ток.


| Свойства | Параметры |
|---|---|
| Входное напряжение силовой части | от 8В до 50В постоянного напряжения (36В рекомендуется) |
| Выходной ток | от 0.3А до 4.5А (пиковое значение 5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Максимальная частота ШИМ | 200кГц |
| 1.1А .. 2.2А .. 3.3А .. 4.5А | |
| 50% или 100% | |
| Температура эксплуатации | от -10 до +45° С |
| Размеры | 80мм*50мм*35мм |
| Вес | 118.3г |
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| 24V+ | Положительный контакт для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| GND | Отрицательный контакты для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| CLK- | Вход для шаговых импульсов STEP (рабочим является передний фронт, длительность > 10мкс) |
| CW- | Вход для управления направлением вращения вала шагового двигателя (DIR) |
| EN- | Вход для включения/выключения шагового двигателя (ENABLE) |
| +5V | Общий сигнальный провод |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
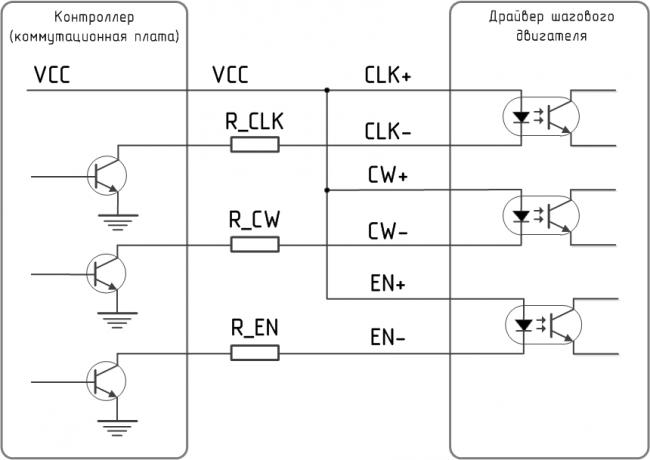
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
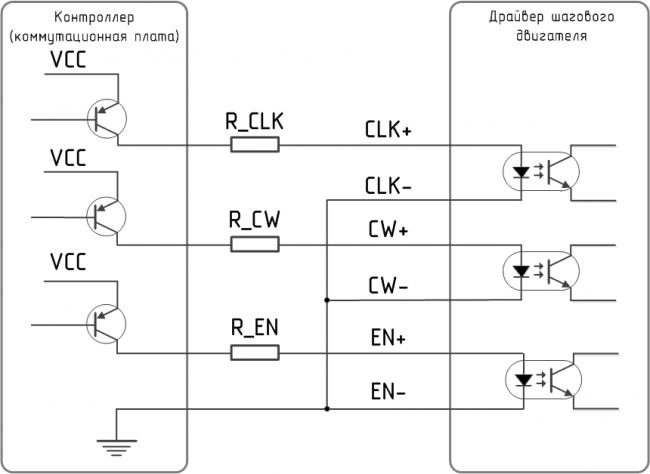
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором
Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
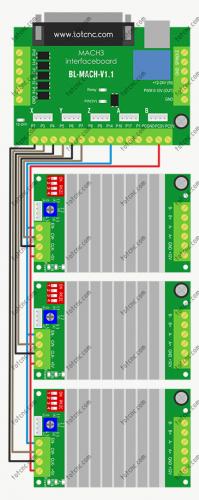
Более подробно о интерфейсной плате BL-MACH-V1.1 можно узнать по ссылке Плата коммутационная (контроллер) BL-MACH-V1.1
СТАТЬЯ В ПРОЦЕССЕ НАПИСАНИЯ
Обновлено: 30.12.2017
Используемые источники:
- https://mysku.ru/blog/aliexpress/42324.html
- https://www.ixbt.com/live/lexus08/komplektuyuschie-dlya-samodelnogo-chpu-s-taobao.html
- http://totcnc.com/tblog/20_instr
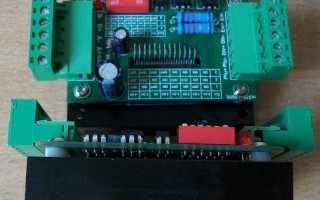
 Схема импульсного преобразователя SEPIC: два варианта выполнения
Схема импульсного преобразователя SEPIC: два варианта выполнения Радиоконструктор усилителя мощности JLH1969 mini 3 Ватт х 2 на транзисторах pnp
Радиоконструктор усилителя мощности JLH1969 mini 3 Ватт х 2 на транзисторах pnp Ремонт светодиодного светильника армстронг 1
Ремонт светодиодного светильника армстронг 1 3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать
3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать