- Из песочницы
- Tutorial
Пролог
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон. 1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.Сразу отчет о том, что у меня получилось: На видео заметно, что во время полета у дрона пропали ножки, но об этом позжеСписок часто задаваемых вопросов:В: Не проще ли купить готовый квадрик и летать?О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от ~120$.В: Нужно ли паять?О: Да, нужно!В: Собрать квадрик самому дешевле, чем купить в магазине?О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
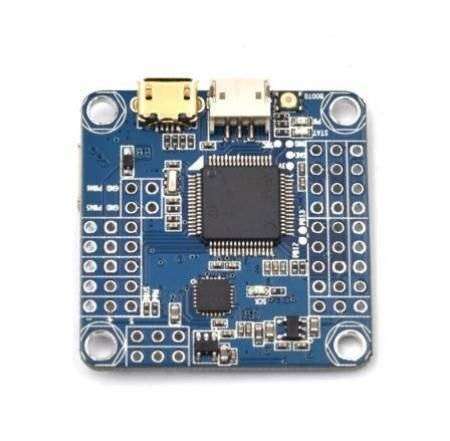
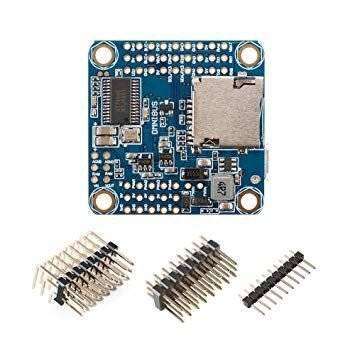
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно. Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику 1) Набор деталей с Aliexpress ~4000 руб. 1.1 Рама 1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А 1.3 Регуляторы Emax Simon K Series на 12A 1.4 Распределительная плата и провода питания 1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах). 1.6 Соединительные провода от контроллера к передатчику 1.7 4 пропеллера (2 левых, 2 правых) 1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме
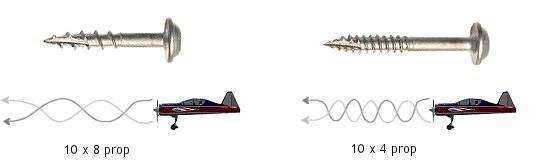
Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику 1) Набор деталей с Aliexpress ~4000 руб. 1.1 Рама 1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А 1.3 Регуляторы Emax Simon K Series на 12A 1.4 Распределительная плата и провода питания 1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах). 1.6 Соединительные провода от контроллера к передатчику 1.7 4 пропеллера (2 левых, 2 правых) 1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме Приемник и передатчик Turnigy 9X 2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.В: Почему именно эта модель?О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.В: Можно ли взять модель подешевле?О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой. 3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб. Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
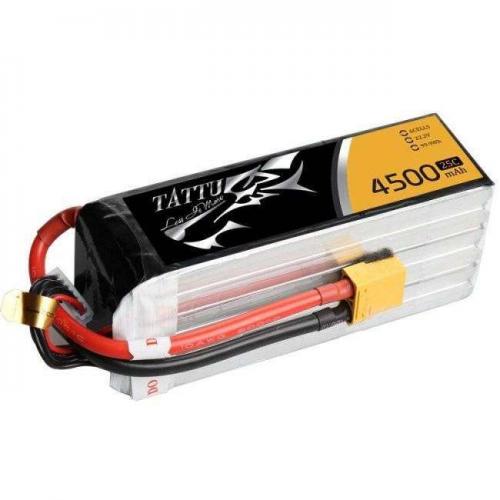
Приемник и передатчик Turnigy 9X 2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.В: Почему именно эта модель?О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.В: Можно ли взять модель подешевле?О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой. 3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб. Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.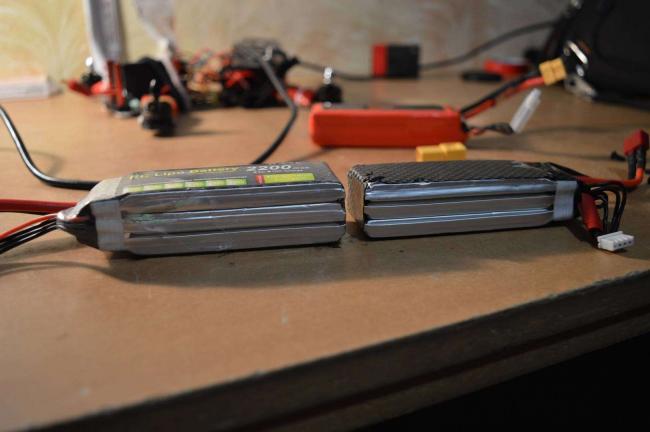 Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера 4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.В: Зачем два? Тебе одного мало?О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь. Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается 5) Аккумулятор для пульта радиоуправления. ~1199 руб.В: Я же уже купил два. Нужен еще один?О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда. В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается. 6) Зарядное устройство для аккумуляторов iMAX B6~1230 руб. iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.В: Как этим пользоваться? Какие режимы выбрать?О: Ответы здесь 7) Переходник с XT-60 на T-коннектор ~140 руб. Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет. 8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб. Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться. 9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб. Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.4 винта на 16 мм вместо 8 мм 10) Мелочовка ~ 300 руб. 10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму 10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности 10.3 Термоусадка. Пригодится, когда будете прятать регуляторы 10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов 10.5 Двухсторонний скотч, изолента 10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия 10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторовЗащита для пропеллеров, напечатанная на 3D принтере 10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель. Всю мелочовку покупал тут1 и тут2. 10) Паяльник само-собой.Общая стоимость ~11878 — 13217 руб. Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз. Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера 4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.В: Зачем два? Тебе одного мало?О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь. Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается 5) Аккумулятор для пульта радиоуправления. ~1199 руб.В: Я же уже купил два. Нужен еще один?О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда. В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается. 6) Зарядное устройство для аккумуляторов iMAX B6~1230 руб. iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.В: Как этим пользоваться? Какие режимы выбрать?О: Ответы здесь 7) Переходник с XT-60 на T-коннектор ~140 руб. Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет. 8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб. Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться. 9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб. Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.4 винта на 16 мм вместо 8 мм 10) Мелочовка ~ 300 руб. 10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму 10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности 10.3 Термоусадка. Пригодится, когда будете прятать регуляторы 10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов 10.5 Двухсторонний скотч, изолента 10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия 10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторовЗащита для пропеллеров, напечатанная на 3D принтере 10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель. Всю мелочовку покупал тут1 и тут2. 10) Паяльник само-собой.Общая стоимость ~11878 — 13217 руб. Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз. Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
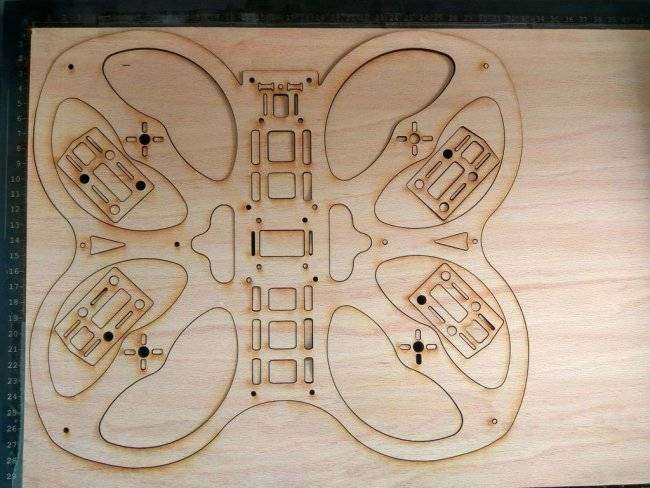
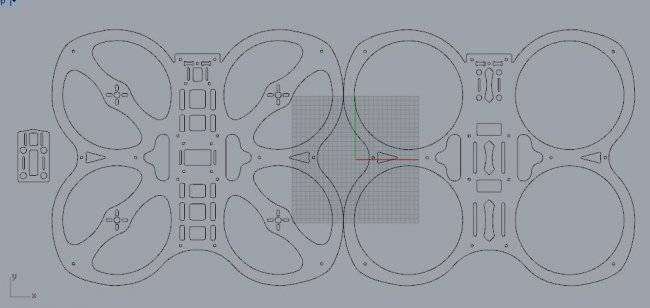
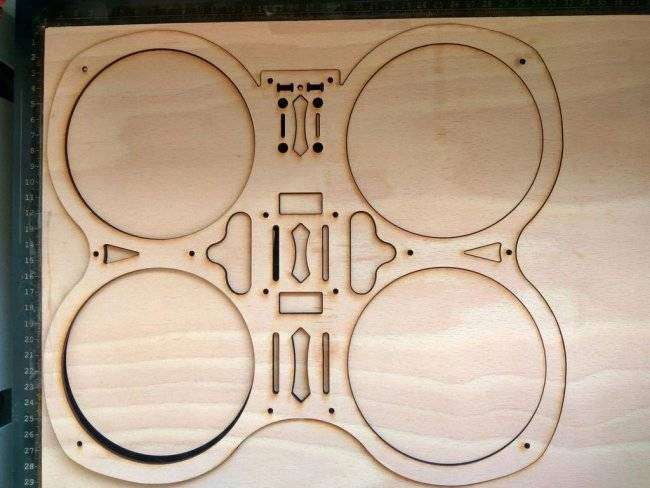
Сборка рамы Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Пайка
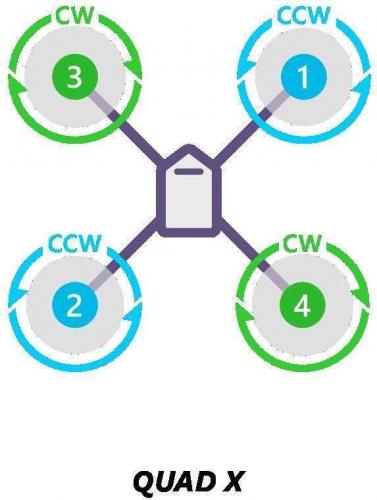
Пайка распределительной платы Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)Припаиваем регуляторы к моторам Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:Подключение регуляторов к моторам Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху) Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
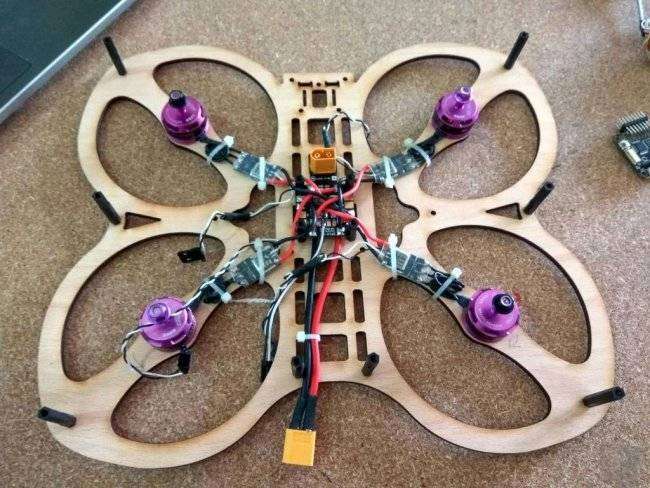
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.Крепим плату. Два слоя двухстороннего скотча + хомут + резинка Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежноКрепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
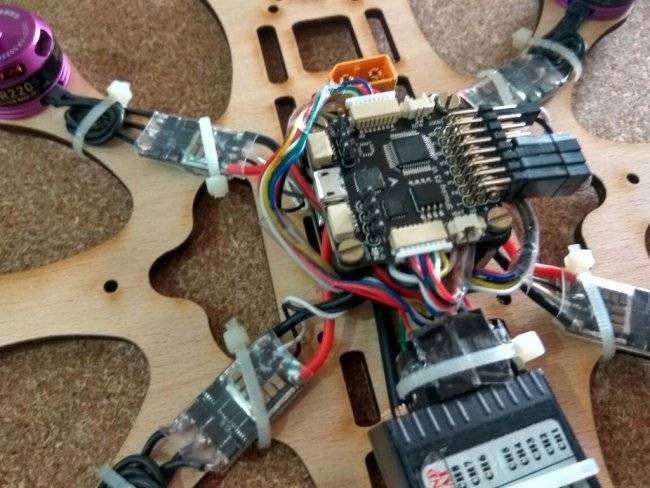
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше. У меня это сделано следующим образом:Крепим полетный контроллер (1). Трава осталась после крашаКрепим полетный контроллер (2)Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
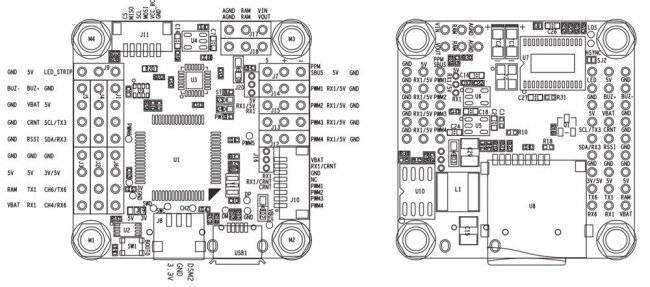
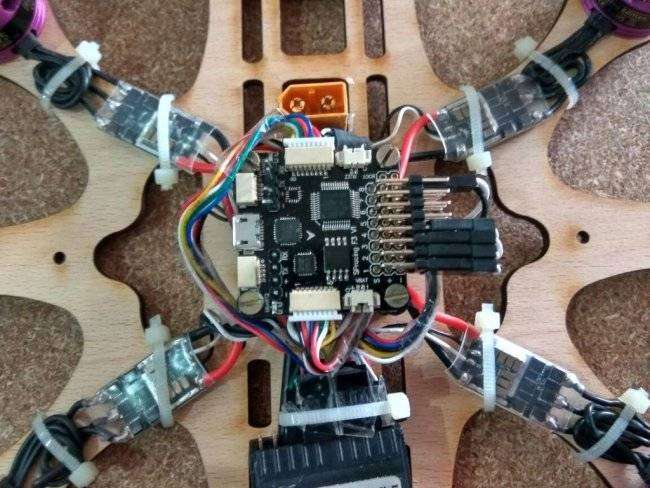
Регуляторы к полетному контроллеру От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.На трех из четырех регуляторах нужно вытащить из разъема красный проводПриемник к полетному контроллеру А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой. Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
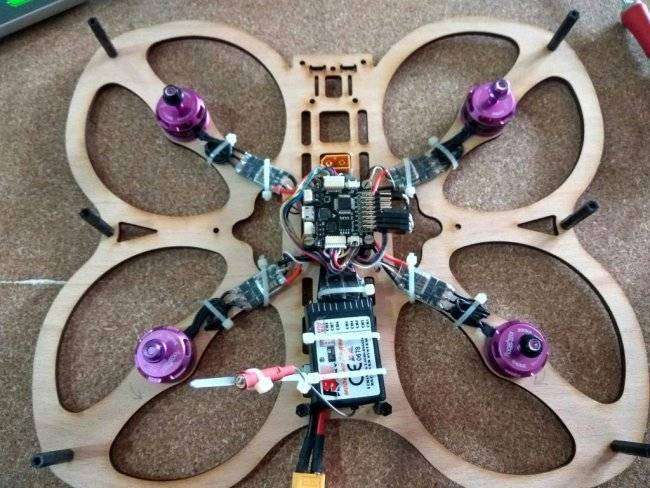
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил «крепление для камеры».«Крепление для камеры»
Итого:


О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.Сломанные ножкиСломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении А вот видео с моего самого первого полета: Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Обещанные ссылки на статьи
Статья 1 | Статья 2 | Статья 3 | Статья 4 | Статья 5 | Статья 6 | Статья 7 Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев. 2 часть скоро.
 Полетный контроллер APM 2.6,обзор и полная видеоинструкция.
Полетный контроллер APM 2.6,обзор и полная видеоинструкция.Итак, дай угадаю. Ты задумался – «а не купить ли мне набор для сборки квадрокоптера». Неплохая мысль, если тебе скучно просто купить готовое решение, или у тебя какие-нибудь специфически требования. Однако, плохое, если ты хочешь сэкономить. Скорее всего, выйдет дороже, и, возможно, хуже. Главное, что ты получишь свой, собственноручно собранный, беспилотник. А там уж и до собственных моделей не далеко.
Сегодня я расскажу – что это такое, и за что хвататься новичку и продвинутому сборщику. Основываясь на этом, ты сможешь начать подбирать детали для дрона с камерой, и собрать его своими руками.
Какие наборы бывают
Неожиданно, но наборы бывают разные. Я не буду делить их на типы креплений, рам, двигателей, и прочее. Это не имеет никакого смысла. Главное, что тебе нужно знать, это то, что они бывают «с начинкой» и «рамы».
Рама представляет из себя основной каркас, на который ты сможешь повесить всё, что душе угодно. Тебе придётся самому разбираться в контроллерах, моторах, пропеллерах, прошивках, и так далее. Если ты в теме, и не плохо понимаешь – что, куда и зачем, то это твой вариант.
«С начинкой», это готовый набор. Тебе остаётся только собрать его. Идеально подходит для новичков. Стоит помнить, что в этих наборах могут быть не самые лучшие компоненты, так что придётся внимательно читать отзывы и форумы.
Для новичков
DJI F450 ARF kit (12 500 рублей)
Состав кита:
- Рама DJI F450
- Два красных и два белых луча
- Крепеж
- 4 мотора DJI 2112
- 4 регулятора DJI ESC 15A Opto
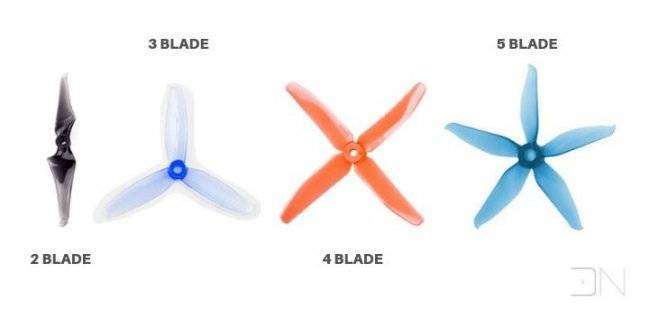
- 3 пропеллера 9.4×4.3″ прямого вращения
- 3 пропеллера 9.4×4.3″ обратного вращения
Как видишь, вся техническая часть уже решена за тебя. Производитель может тебе предоставить параметры получившегося коптера, так как знает исходные значения. При самостоятельной сборке, рассчитывать их придётся тебе.
Однако, это ещё не всё. Тебе придётся докупить некоторые компоненты:
- Аппаратура управления 5-канальный и выше на 2.4 Ггц
- Полетный контроллер (DJI NAZA-M, DJI NAZA-M с модулем GPS и компасом или DJI Wookong-M)
- Аккумулятор 3S~4S LiPo
- Зарядник
- Дешёвый подвес (для начала) и дополнительная электроника по желанию (FPV камера, светодиоды…)
В итоге, ты получишь крутой коптер, который ты собрал своими руками. При этом, тебе не придётся разбираться в куче параметров, горах документаций, и всех прочих нюансах. Далее ты сможешь его кастомизировать. Менять можно всё, до чего дотянутся руки, а они дотянутся, поверь.
Сразу докупи запчасти. Как минимум – пару запасных пропеллеров. Обязательно пригодится.
Сейчас я привёл тебе только пример того, от чего тебе стоит отталкиваться. Для более ясной картины я расскажу о том, на что конкретно нужно обращать внимание.
 Устройство, схема и ремонт контроллера
для гирлянд своими руками
Устройство, схема и ремонт контроллера
для гирлянд своими руками- Много свободного пространства в раме. Будет просто работать
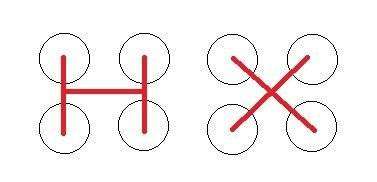
- Это КВАДРОкоптер. Я очень не советую начинать с других компоновок. Ты настрадаешься даже с настройкой этого аппарата, а уж о каком-нибудь страшном октокоптере с соосным расположением пропеллеров думать пока рано
- Элементы каркаса так же являются и печатными платами (плата разводки). Это очень приятный бонус. У тебя не возникнет путаницы с проводами, ты просто физически не сможешь поймать КЗ, и у тебя будет шанс перепаять ещё раз, ели что-то пошло не так
- Большой запас прочности и мощности. Тебя не будут ограничивать разнообразные параметры. Тут всё сделано так, чтобы дать тебе как можно больше свободы. Тебе не придётся выбирать между лампочкой и камерой
- Красивый внешний вид. Даже если ты решил, что для тебя это не важно – это важно. Когда ты соберёшь свой коптер, посмотришь на него, и видишь торчащие провода, хомуты, замотанный синей изолентой аккумулятор и прочие косяки, которые присущи неопытному сборщику – мысль о том, что надо было купить готовый, тебя сожрёт. Радости будет куда больше, если он будет красивым.
Для продвинутых
Если ты не плохо разбираешься в коптерах, у тебя был уже, как минимум, один, и ты уже сделал для себя акценты на важных моментах, будь то тяга, скорость, или время полёта, то мне практически нечего тебе сказать. У тебя явно уже сложилось своё видение идеального БПЛА, которое вряд ли совпадает с моим.
Однако, я тебе осмелюсь посоветовать несколько готовых вариантов, которые тебя точно не оставят огорчённым.
Комплект: DJI Naza V2+GPS+F550 ARF kit+landing skid
Крутой, стабильный и тяговитый коптер, выполненный на базе контроллера DJI Naza-M V2. Будет отличным выбором для аэросъёмки. К тому-же это гексакоптер. Думаю, тебе будет интересно попользоваться такой компоновкой.
Комплектация
- Рама гексакоптера DJI F550
- Полетный контроллер DJI Naza-M V2 with GPS
- Шасси
Коптер выполнен из очень прочного материала, корпус имеет интегрированную печатную плату, да и в целом выглядит недурно. На мой взгляд- очень интересный агрегат.
Октокоптер на базе рамы Gryphon GD-X8 1200FX
Просто монструозная махина. 1200мм в диаметре. Четыре луча, по два соосных мотора на каждом. Легчайший, карбоновый корпус, посадочные опоры, а главное – подъёмный вес ограничен только силовой установкой.
В рекомендуемой комплектации:
- Полётный контроллер: DJI A2
- Регуляторы ESC: 40-45A
- Пропеллеры: 22-24 дюйма, максимально 26
- Камеры: RED Epic, Canon 5D / C100
- Крепление для камеры: DJI Zenmuse Z15Freefly systems MOVI MR
- Батареи: от 10000 mah и больше
Это уже не просто коптер, это белаз. Думаю, научившись собирать и отлаживать такие махины- на этом можно даже не плохо заработать. Впрочем, это только пример, который далёк от реальности (из-за цены), но наше дело вдохновить. Собирать любой другой беспилотный летательный аппарат с соосной компоновкой винтов тебе будет очень и очень интересно.
Пошаговая сборка
А нет её! Обманул. Как собирать – дело каждого. Я не знаю какая у тебя будет модель. Могу лишь примерно дать понять – с чем придётся сразиться.
 3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать
3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробоватьРама
Со сборкой рамы проблем не будет никаких. Ты её просто соберёшь из 4-8 больших кусков.
- Не перетягивай винтики. Если ты сорвёшь резьбу в пластике- будет обидно
- Старайся не перекосить конструкцию. В ней не должно быть напряжений. Если что-то собирается в натяг, значит нужно узнать почему, и ликвидировать проблему
- Помни, что твой контроллер уже имеет передатчики и приёмники сигнала. Тебе их не нужно докупать, но пульт управления подбирай конкретно под них
Проводка
Со сборкой электроники могут быть проблемы. Тебе нужен будет паяльник, и основные навыки пайки. Сложность напрямую зависит от цены. Я уже советовал тебе брать фирменный коптер. Во многом потому, что они делают коннекторы, и не косячат с распайкой контроллеров.
- Думай прежде чем паять. Электроника нежная, и очередной нагрев может не пережить
- Давай деталям остыть. Помни, ты боишься их перегреть
- Если моторы крутятся в одном направлении, то это не моторы неправильные, а подключение. Иногда это можно решить программно, а иногда поменяв местами 2 провода из трёх
- Упаковывай провода как можно компактнее и не скупись на термоусадку для изоляции. КЗ может тебя погубить
- Обычно, ты можешь запитать дополнительную электронику, типа лампочек и камеры от самого контроллера
- Чем дальше провода друг от друга, тем меньше помех. Разделяй их парой слоёв термоусадки, или приклеивай к раме
Ну и в завершение хочется сказать – читай, экспериментируй, спрашивай. Собирать свой квадрик- дело это интересное, и безусловно полезное. Перед стартом советую немного разобраться в теме. Почитать наш и другие сайты, покурить форумы, даже ознакомиться со спецификациями деталей. Это поможет избежать дурацких ошибок на старте. А в итоге, может и дойдёт до сборки квадрокоптера из подручных материалов. Удачи, пилот!
СТОЙ! Чуть не забыл. Видишь кнопочки внизу? С их помощью ты можешь репостнуть эту статью в свою социалочку. Тем самым ты подстегнёшь меня писать больше и лучше. Кстати, больше и лучше можно найти в наших группах. Подписывайся.
pogranecСпец / АвиацияДобавлено 2 комментария



























Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь. Используемые источники:
- https://habr.com/post/403245/
- https://drongeek.ru/profi/detali-dlya-drona
- https://usamodelkina.ru/15545-kak-sdelat-kvadrokopter.html

 Квадрокоптер Syma X8HG с 8.0MP камерой HD
Квадрокоптер Syma X8HG с 8.0MP камерой HD Необычные идеи изготовления новогодней светодиодной гирлянды своими руками
Необычные идеи изготовления новогодней светодиодной гирлянды своими руками Как правильно прикуривать аккумулятор одного автомобиля от другого: две пошаговые инструкции
Как правильно прикуривать аккумулятор одного автомобиля от другого: две пошаговые инструкции 3Д-сканер своими руками: детали и технологии. Самодельный 3D-сканер
3Д-сканер своими руками: детали и технологии. Самодельный 3D-сканер