Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия

Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
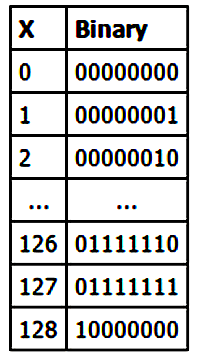
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
 Делаем простую бормашину, практически из хлама
Делаем простую бормашину, практически из хламаТаблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
 Жало НАККО T12K после нескольких лет использования , взял да распилил
Жало НАККО T12K после нескольких лет использования , взял да распилилУ инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
 Беспроводной HDMI. Виды и работа. Устройство и применение
Беспроводной HDMI. Виды и работа. Устройство и применениеПо точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
-
Потенциометры. Виды и особенности. Устройство и работа
-
Реостаты. Виды и особенности. Принцип действия и устройство
-
Автотрансформаторы (ЛАТР). Типы и особенности. Принцип работы
-
Сервоприводы. Виды и устройство. Характеристики и применение
РубрикаОБОРУДОВАНИЕ
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов — три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера. На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора (на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга на 90 градусов: синусная и косинусная. На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке — напряжение пропорциональное косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Код Грея | ||
|---|---|---|
| 000 | 000 | |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1, биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
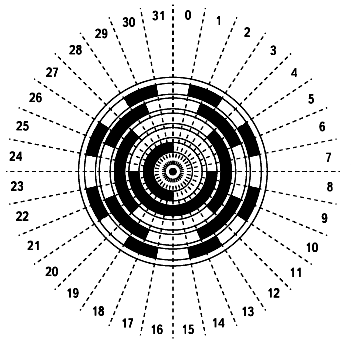
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.

Всё о абсолютных энкодерах. От А до Я: виды цифровых кодов, особенности кодирования/декодирования сигналов в абсолютных энкодерах, описание работы абсолютного энкодера, конструкция одно- и многооборотного энкодера, терминология используемая в тех. документации на абсолютные энкодеры. Абсолютный или инкрементальный? Когда оправдано или неизбежно применение абсолютного энкодера.
Абсолютные энкодеры от А до Я
Для чего вообще нужен абсолютный энкодер?
В машино- и станкостроении для осуществления правильного позиционирования систем контроля за передвижением постоянно требуются самые последние и точные позиционные данные. Благодаря своей способности в любой момент осуществлять присвоение точных и однозначных позиционных значений какой-либо угловой позиции или позиции перемещения абсолютные энкодеры стали одним из самых важных соединительных звеньев между механической частью машины и ее блоком управления.
История создания первого абсолютного энкодера вращения и основные отличия от инкрементного
Первый абсолютный датчик, принцип работы которого основывался на оптоэлектронном считывании закодированных растров, был разработан немецкой компанией FRABA в 1973 году. В то время как инкрементальные датчики определяют положение только относительно какого-то определенного положения, в абсолютных датчиках информация о угловом положении закодирована механически, например на оптическом диске в виде растра содержащего уникальный код для каждой позиции вала. Таким образом абсолютный энкодер выдает информацию о положении вала, т.е. о текущей координате, сразу после включения и формирует сигнал как во время вращения, так и в режиме покоя.
Абсолютный энкодер не теряет своего значения при потере питания и, если в обесточенном состоянии вал энкодера был провернут на определенный угол или какое-то количество оборотов, то при появлении напряжения энкодер сразу выдаст новое, фактическое угловое положение вала и фактический номер оборота. Благодаря этому свойству не требуется после каждого включения системы производить движение механических частей машины на стартовую или как принято называть референтную позицию, что является неоспоримым преимуществом абсолютных энкодеров перед инкрементальными (импульсными).
Преимущества абсолютного энкодера
Преимуществом абсолютного энкодера является также и то, что он не подвержен помехам. В случаях, когда сигнал с диска не может быть полноценно прочитан энкодером, например, если вал вращается слишком быстро, точный угол поворота будет зарегистрирован, когда скорость вращения уменьшится. Но даже при быстром вращении вала возможна регистрация положения, хоть и с меньшей точностью. Для этого во внимание просто принимается только информация поступающая от более старших разрядов, т.е. искаженная (за счет большой скорости вращения) информация поступающая от младших разрядов просто игнорируется. Абсолютный энкодер устойчив к вибрациям и другого рода помехам, т.к. ошибка в результате подсчета «ложных» импульсов, возникших в результате, например, вибрации, исключена.
Для более четкого понимания принципа работы абсолютных энкодеров, в частности основания для необходимости использования специальных способов кодирования сигналов при построении абсолютных энкодеров, будет уместно вспомнить некоторые основы цифровой техники, в т.ч. виды/методы кодирования чисел/сигналов описанных ниже.
Виды цифровых кодов и особенности их использования в системах позиционирования
Бинарные коды
Термин «бинарный» по смыслу — состоящий из двух частей, компонентов. Таким образом бинарные коды это коды которые состоят только из двух символьных состояний например черный или белый, светлый или темный, проводник или изолятор. Бинарный код в цифровой технике это способ представления данных (чисел, слов и других) в виде комбинации двух знаков, которые можно обозначить как 0 и 1. Знаки или единицы БК называют битами. Одним из обоснований применения БК является простота и надежность накопления информации в каком-либо носителе в виде комбинации всего двух его физических состояний, например в виде изменения или постоянства светового потока при считывании с оптического кодового диска.
В таблице ниже представлены две основные возможности кодирования — двоичное кодирование и кодирование по методу Грея (который далее будет описан подробнее), а также способы представления информации в различных системах счисления.Для разных систем счисления в таблице используются следующие сокращения:десятичное число = decimal = DECдвоично-десятичное число = binary code decimal = BCDшестнадцатеричное число = hexadecimal = HEX
| Обычное (двоичное) кодирование | |||||
| DEC | BCD | ||||
| 0000 | 0h | 0000 | 0h | ||
| 1 | 0001 | 1h | 1 | 0001 | 1h |
| 2 | 0010 | 2h | 3 | 0011 | 3h |
| 3 | 0011 | 3h | 2 | 2h | |
| 4 | 100 | 4h | 6 | 110 | 6h |
| 5 | 0101 | 5h | 7 | 0111 | 7h |
| 6 | 0110 | 6h | 5 | 5h | |
| 7 | 0111 | 7h | 4 | 4h | |
| 8 | 1000 | 8h | 12 | 1100 | Ch |
| 9 | 1001 | 9h | 13 | 1101 | Dh |
| 10 | 1010 | Ah | 15 | 1111 | Fh |
| 11 | 1011 | Bh | 14 | Eh | |
| 12 | 1100 | Ch | 10 | Ah | |
| 13 | 1101 | Dh | 11 | 1011 | Bh |
| 14 | 1110 | Eh | 9 | 9h | |
| 15 | 1111 | Fh | 8 | 8h |
Двоично-десятичный код (Binary code decimal)
Код Грея (Gray code)
Код Грея (Gray code — назван в честь американского физика Frank Gray) идеально подходит для систем механического позиционирования, в т.ч. абсолютных энкодеров. Код Грея предпочтительнее обычного двоичного тем, что обладает свойством постоянства бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Таким образом, Грей-код является так называемым одношаговым кодом. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения, а каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице.
Из таблицы выше видно, что число представленное кодом Грея, при переходе от одного числа к другому (соседнему), меняет свое состояние лишь в одном разряде информации, в то время, как в двоичном коде могут поменять свое состояние несколько разрядов (бит) одновременно. Биты меняющие свое состояние, при переходе от одного числа к другому, в таблице обозначены красным цветом.
В случае использования кода Грея погрешность при считывании информации на участке перехода от одного числа к другому приведет лишь к тому, что этот переход будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения на участке перехода полностью исключается. Это особенно актуально для датчиков, где носителем / источником информации (например, о положении вала энкодера) является механический элемент. В случае абсолютного энкодера это оптический диск с механически нанесенными на него метками, где минимальные геометрические погрешности / смещения нескольких оптических дорожек / секторов относительно друг друга не исключаются из-за погрешностей офсетной печати при производстве на стадии нанесения рисунка на оптический диск. На картинке ниже представлен диск энкодера с рисунком (растром) в формате Грей-кода.
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещается на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализуются этим методом. Так 9-ти битный код Грея равный 512 шагам, урезанный с обеих сторон на 76 шагов будет равен 360°.
Устройство оптического абсолютного энкодера
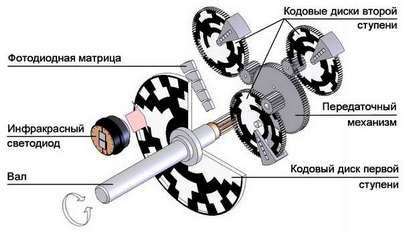
Инфракрасные лучи светодиода просвечивают кодовый диск и попадают на фототранзисторную считывающую матрицу, расположенную с обратной стороны кодового диска. При каждом шаге углового положения кодового диска темные его участки предотвращают попадание света на те или иные фототранзисторы считывающей матрицы преобразущей световые сигналы в электрические. Электрические сигналы, в свою очередь, преобразуются электроникой энкодера в двоичный код.
Однооборотный энкодер

Многооборотный энкодер
Линейные перемещения предполагают необходимым применение измерительной системы регистрирующей не только положение вала в пределах одного оборота, но и определенного количества оборотов. Например, в линейных приводах или в задачах измерения с помощью зубчатой измерительной штанги уместно применение энкодеров, где дополнительно к измерению угла поворота в пределах одного оборота (первой ступенью энкодера) также происходит регистрация количества оборотов дополнительным, своего рода редуктором (образующим вторую ступень энкодера) состоящим из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ). Разрешение многооборотного энкодера, как правило, обозначается раздельно как разрешение в пределах одного оборота + количество оборотов в формате количества бит. Так, комбинация цифр в наименовании энкодера в виде, например, 1216 означает разрешение 12 бит оборотов (4096 оборотов) и 16 бит в обороте (65536 меток на оборот).
Магнитные абсолютные энкодеры
Принцип магнитных измерений
Магнитные энкодеры определяют угловое положение с использованием магнитно-полевой технологии. Постоянный магнит, установленный на валу энкодера, создает магнитное поле, которое измеряется датчиком, формирующим уникальное значение абсолютного положения.
Инновационная многооборотная технология
Многооборотные магнитные энкодеры IXARC POSITAL используют инновационную технологию для отслеживания количества оборотов, даже если оборот произошел при отключенном питании системы. Для выполнения этой задачи энкодеры преобразуют вращение вала в электрическую энергию. Технология основана на эффекте Виганда: когда постоянный магнит на валу энкодера поворачивается на определенный угол, магнитная полярность в „проводе Виганда“ резко меняется, создавая кратковременный всплеск напряжения в обмотке, окружающей провод. Этот импульс отмечает поворот вала, а также обеспечивает питание электронной цепи, регистрирующей данное событие. Эффект Виганда происходит в любых условиях, даже при очень медленном вращении, и исключает потребность в резервных батареях.
Особенности магнитных энкодеров
Магнитные энкодеры являются надежными, долговечными и компактными. Конструкция, не требующая использования батарей и не имеющая зубчатых передач, обеспечивает механическую простоту и более низкую стоимость по сравнению с оптическими энкодерами. Их компактные габариты позволяют использовать их в очень ограниченном пространстве.
И всё таки — оптический или магнитный?
Этот вопрос однажды задали соучредителю группы компаний «Fraba» (он же директор компании Posital) в интервью журнала «Конструктор» при обсуждении темы внедрения новой магнитной технологии при производстве энкодеров вращения.Ссылка на перевод публикации этого интервью см. здесь в статье «Важные критерии при выборе энкодера» >>
Терминология абсолютных энкодеров
| Абсолютный, однооборотный (Singleturn) датчик угла поворота | Датчик угла поворота, который для каждой позиции вала, в пределах одного оборота, выдает однозначную, кодированную информацию. Информация о положении вала сохраняется также и при пропадании напряжения питания. |
| Абсолютный, многооборотный (Multiturn) датчик угла поворота | Датчик угла поворота, который помимо информации о положении вала в пределах одного оборота выдает также информацию о номере оборота вала. Этот датчик также полностью сохраняет информацию при пропадании напряжения питания, т.к. положение вала в пределах одного оборота и номер оборота регистрируются физически с помощью нескольких, например, оптических кодовых дисков. |
| ASI | Asynchron-Serielles-Interface. Асинхронный интерфейс с последовательной передачей данных. Аппаратная часть (драйвер) реализована по стандарту EIA RS485 или RS422. |
| ASIC | Специальная микросхема высокой интеграции, выполненная под заказ. Используется во многих энкодерах. |
| Baudrate | Частота (скорость) передачи данных последовательного интерфейса в битах в секунду. |
| CAN-Bus Multi-Master-Bus-System | Интерфейс связи, допускающий подключение к сети (двухпроводной линии связи) нескольких ведомых устройств. В настоящее время для CANopen приняты некоторые нормированные протоколы. Для датчиков угла поворота действует — DSP 406. |
| Количество меток (шагов) в секунду для абсолютных энкодеров. Для датчиков с разрешением 13 бит (8192 метки) и 400 kHz частотой смены кода, максимальная электрическая частота вращения составит 3000 min-1. | |
| Datavalid | Выход диагностики для перепроверки достоверности посылаемых данных. |
| Управляющий вход для установки последовательности данных. Задает направление вращения по- или против- часовой стрелки при котором данные на выходе будут при вращении возрастать. | |
| Точность | Отклонение измеренного энкодером угла поворота (положения) от фактического. Точность зависит, в первую очередь, от точности нанесения рисунка кода на, например, оптический диск. Риски / секторы нанесенные на диск имеют определенную нелинейность, т.е. неравномерная плотность меток по окружности диска определяет точность энкодера (как правило в процентах). |
| Preset (Обнуление) | Управляющий вход, позволяющий обнулить показания на выходе абсолютного энкодера в любом месте во всей области разрешения без необходимости механического позиционирования вала. Для перепрограммируемого абсолютного энкодера с помощью этого входа может быть программно выставлено любое значение (Offsetwert). |
| Profibus DP | Master-Slave-Bus-System с двухпроводной линией связи и аппаратным EIA RS485 драйвером. Profibus-DP протокол специфицирован для энкодеров. |
| Resolution per revolution (Разрешение в обороте) | Для однооборотного датчика (Singleturn) указывает максимальное количество меток в пределах одного оборота. Для программируемого энкодера параметр необходимого разрешения в пределах одного оборота энкодера может задаваться пользователем программно. В этом случае энкодер пересчитывает фактическое (физическое) разрешение в более низкое. |
| SSI | Synchron-Serielles-Interface. Передача данных от энкодера осуществляется синхронно (бит за битом) по внешнему тактовому импульсу. |
| Takt +, Takt — | Тактовые провода линии связи SSI инерфейса для синхронной передачи данных.Takt + и Takt — образуют гальванически развязанную (от проводов питания) линию связи для приема энкодером тактового сигнала. |
| Data +, Data — | Провода данных линии связи SSI инерфейса для синхронной передачи данных.Data + и Data — образуют гальванически развязанную (от проводов питания) линию связи для выдачи энкодером сигнала данных. |
Используемые источники:
- https://electrosam.ru/glavnaja/slabotochnye-seti/oborudovanie/enkodery/
- https://www.maxplant.ru/article/encoder.php
- products/princip-raboty-absolyutnogo-enkodera/

 Как сделать бормашину своими руками: инструкция по сборке и видео
Как сделать бормашину своими руками: инструкция по сборке и видео Arduino Attiny85: младшая линейка микроконтроллеров
Arduino Attiny85: младшая линейка микроконтроллеров Твердотельное реле: виды, практическое применение, схемы подключения
Твердотельное реле: виды, практическое применение, схемы подключения Как разобрать кофемолку
Как разобрать кофемолку