В этой статье постараемся помочь вам с выбором моторов для квадрокоптера и вы сможете ответить на вопрос — «Как выбрать двигатели для квадрокоптера?».
Для поиска подходящего мотора, мы будем использовать информацию, которую предоставляет производитель в описании своих компонентов.
С чего начать?
Первое, что нужно сделать — это посчитать вес вашего квадрокоптера. Конечно, когда вы только планируете, составить конечный вес сложновато и придется опираться на данные из описания товаров и честность продавцов.
Сейчас продавцы чаще стали указывать, какие моторы будут подходить для конкретной рамы, но не конкретно вот этот двигатель, а разброс.
После подсчета веса рамы, прибавьте вес камеры и подвеса, последний — если вы собираете съемочный квадрокоптер.

Строение двигателя и как он работает
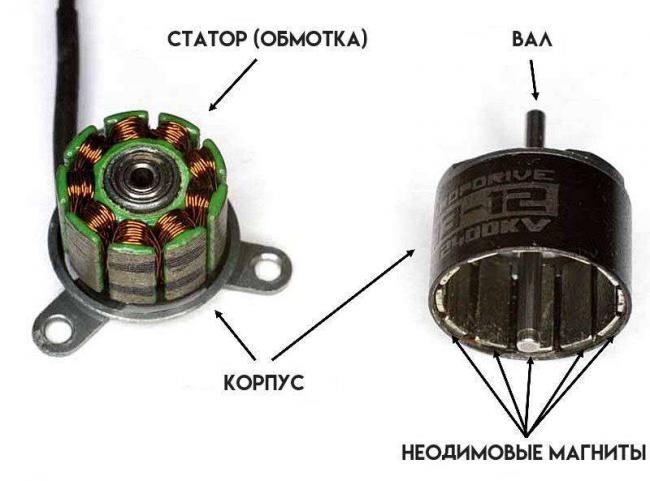
Все бесколлекторные (безщеточные) двигатели состоят из 4 компонентов:
Статор. Статор это обмотка двигателя, состоящая из 3 фаз длинных тонких проводков, которые обматываются вокруг сердечника. Провода покрыты эмалью, чтобы предотвратить короткое замыкание при обмотке и работе. Если вы хорошо учили физику, то знаете, что ток, протекающий по проводу, создает магнитное поле. Когда провод обмотан вокруг чего-то, то магнитное поле увеличивается. Чем больше ток, тем больше сила магнитного поля и больше крутящий момент от вашего двигателя. Однако, большие токи сильно нагревают обмотку, особенно вот такие тонкие провода и защитная эмаль может оплавиться при сильном нагреве, тогда произойдет короткое замыкание и двигатель станет нерабочим.
Неодимовые магниты. Эти магниты из редкоземельных металлов генерируют фиксированное магнитное поле, они маленькие, но создают очень сильное магнитное поле. Они приклеены эпоксидной смолой или цианокрилатом к корпусу мотора.
Корпус двигателя защищает магниты и обмотку. Обычно он изготовлен из легкого металла, такого как алюминий. Более продвинутые двигатели имеют корпусы, которые сделаны как вентиляторы, т.е. при вращении нагоняют воздух на обмотку сердечника, чтобы охлаждать ее.
 Комплекты мотор-колёс для велосипеда
Комплекты мотор-колёс для велосипедаВал мотора жестко прикреплен к верхней части. Это рабочий компонент мотора, который передает крутящий момент на пропеллеры.
Итак, как работает бесколлекторный мотор?
Магниты и обмотка создают движущую силу благодаря взаимодействию и созданию магнитного поля между ними. Это происходит благодаря подаче постоянного тока на определенную обмотку (у нас 3 фазы, т.е. 3 отдельных провода на обмотке), ток подается и прекращает подаваться на определенные обмотки в короткий промежуток времени, тысячные доли секунды, заставляя крутиться верхнюю часть с магнитами. Этим процессом полностью управляют ESC-регуляторы, это мозг моторов, они решают, когда подавать ток, а когда нет и с какой частотой. Бесколлекторные двигатели 3-х фазные.
Двигатели для дронов делятся на два типа:
- Коллекторные
- Бесколлекторные
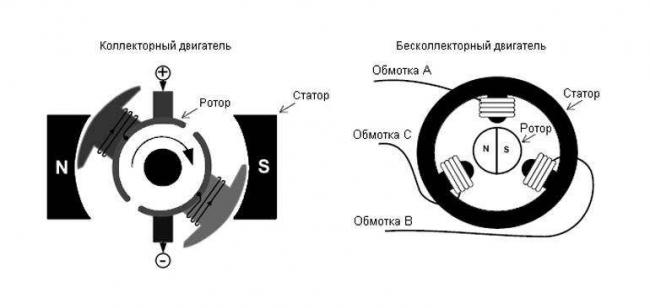
Коллекторные двигатели используются в основном на слабых дронах начального уровня и для съемочных квадрокоптеров начального уровня. Дело в том, что они не могут развивать значительные обороты и мощность, а это значит, у них будет маленькая подъемная сила. Они более громоздкие и более склонны к поломкам, так как у таких моторов больше трущихся деталей. Принцип работы коллекторных двигателей: мотор состоит из корпуса, внутри корпуса находятся магниты – плюс и минус, корпус неподвижен, а в движение приводится ротор с обмоткой с помощью щеток, которые подают электричество на обмотку.
Бесколлекторные двигатели используются на гоночных и профессиональных дронах. Отличаются огромными мощностями, значительными оборотами и тягой. Такие двигатели более компактные, по весу примерно такие же, имеют долговечность за счет минимума движущихся частей, да и те на подшипниках.
Расшифровка маркировка двигателей квадрокоптеров
KV – оборотов в минуту на вольт, чем больше число, тем мощнее двигатель. Например, 2300KV разгонит дрон до 100км/час.
A2313/16T – Буква А это класс двигателя. 23 – диаметр магнитопривода в мм, толщина набора 13мм, 16 – витков. Чем меньше витков у двигателя, тем больше KV.
 Какие бывают электродвигатели для велосипедов и как их устанавливать
Какие бывают электродвигатели для велосипедов и как их устанавливатьВес и тяга двигателей
В мультироторных квадрокоптерах, двигатели обычно могут поднять 50% от веса самого дрона, то есть, вес дрона в рабочем состоянии 400 грамм, значит он сможет поднять еще примерно 200 грамм полезного груза, при этом, стик газа будет на середине. А общая тяга двигателей для такого квадрокоптера должна быть не менее 800 грамм.
Запас мощности — важное правило, чтобы оставалась возможность полного управления квадрокоптером под нагрузкой, особенно в ветер или во время резких маневров. Для съемочных дронов должен быть запас тяги к весу 2:1 минимум, для гоночных в 2 раза больше.
Для гоночных квадрокоптеров нужны очень маневренные и мощные двигатели, у которых тяга не менее 1 кг, а лучше больше, так как полеты на гоночных квадрокоптерах очень агрессивные и быстрые, постоянно меняется траектория полета, которая должна меняться моментально.
Кстати, если для съемочного квадрокоптера подобрать двигатели с большой тягой, то на него можно будет повесить, например, 2 аккумулятора, вместо одного, чтобы можно было летать дольше, чем 20 минут, но это время будет увеличиваться прямо пропорционально добавленному весу и соответственно будет уменьшаться предел тяги моторов.
Практический пример
Рама
В качестве примера рассмотрим сборку мини квадрокоптера на классической раме 220 мм — Martian II 220. Вес рамы 145 +- 2 грамма.
Двигатели
Как говорил выше, многие продавцы пишут в описании какие моторы подойдут к их раме. В нашем случае, продавец указал двигатели: 1806, 2204, 2205, 2206. Посмотрев на площадке средний вес 1 двигателя — 25-28 г, можно предположить, что общий вес из 4 моторов — 100 грамм в среднем.
Аккумулятор
К этой раме отлично подойдут аккумуляторы LiPo 4S 1300mAh или 1500mAh, вес их составляет примерно 157 грамм.
FPV система: видеопередатчик и камера
Камеры бывают очень легкие, например, Caddx Turbo весит всего 3,5 грамма, а обычные классические до 9 грамм.
Видеопередатчики без дополнительной защиты тоже очень легкие, вес у них колеблется от 4,5 грамм до 6-7 грамм.
Полетный контроллер и плата разводки питания (PDB)
Эти компоненты не тяжелее другой электроники — в среднем по 3,5 грамма, итого до 10 грамм веса.
 Комплект для электровелосипеда: советы при выборе, производители
Комплект для электровелосипеда: советы при выборе, производителиРегуляторы оборотов и приемник
По отдельности регуляторы оборотов (ESC) весят больше, чем цельная плата 30,5 х 30,5, но и если выйдет из строя 1 регулятор, то придется менять всю плату. Это не относится к регуляторам, которые по отдельности, но вес чуть больше. Так, цельная плата ESC весит в среднем 8 грамм, а по отдельности в среднем 10 грамм.
Приемник (это то, что принимает сигнал с пульта управления и передает его полетному контроллеру) — здесь тоже самое как с видеопередатчиками, если плата не защищена, то ее вес может быть 5 грамм, но и повредить ее легче, а с корпусом они могут быть до 20 грамм.


Пропеллеры
Тоже имеют незначительный вес, 1 пропеллер весит 1-2 грамма.
Остальной вес и итого
Не забывайте учитывать и другой вес — крепление для камеры, крепление аккумулятора, болты и так далее. Можете прибавить еще 10-50 грамм, в зависимости от того, что вы будете использовать, а также учитывайте вес проводов.
Итого
- Рама — 145 г;
- Двигатели — 100 г;
- Аккумулятор — 157 г;
- FPV система — в среднем 10 г;
- Полетный контроллер и PDB — 10;
- Регуляторы оборотов и приемник — в среднем 9 г;
- Пропеллеры — 5 г.
Итого: примерно 436 грамм + 10 грамм на провода и крепления = 446 грамм вес полностью снаряженного квадрокоптера по минимуму, но для запаса берем 500 грамм.
Бывают рамы значительно легче, например по 70 грамм, но они тонкие и электроника почти не защищена.
Теперь нужно подобрать двигатели, которые смогут хорошо работать с весом нашего дрона, так как вес 500 грамм, значит тяга двигателей требуется как минимум в 2 раза выше, то есть, нам нужны двигатели, у которых суммарная тяга не менее 1000 г, то есть 1 мотор — не менее 250 грамм!
Резюмируем ответ на вопрос, как подобрать двигатели для квадрокоптера: считаем общий вес собранного квадрокоптера вместе с примерно выбранными двигателями (как правило это 100 грамм) и умножаем на 2 — такую тягу должен иметь 1 двигатель.
Каждый продавец размещает таблицу, с какими пропеллерами развивается какая тяга, например, у Racerstar 2205 она такая:
РекомендуемПропеллеры для квадрокоптера: виды и использование
Что мы видим: если использовать пропеллеры 5045 — в обычном режиме при 19.2А на двигатель — он развивает 660 грамм тяги, а в пиковой нагрузке при 27.6А двигатель развивает 950 грамм!
Таким образом, изучив несколько таблиц в карточках товаров, вы будете четко понимать, какие двигатели вам нужны.
Но если вам все же сложно понять, какие нужны двигатели, пишите в комментариях, помогу.
РекомендуемБолее подробно о всех компонентах читайте здесь: Полный справочник (FAQ) о гоночных квадрокоптерах: с чего начать и как летать
На что еще следует обратить внимание при выборе двигателя
Выше я написал, что вам нужно смотреть на тягу, которую развивает двигатель (Pull g).
Но вам также стоит обратить внимание на эффективность — Efficiency — граммы на ватты.
Что это значит? Все просто, чем больше Watt тратится, тем быстрее разрядится аккумулятор. Да, двигатель поднимет 710 грамм, но быстро разрядит аккумулятор, то есть, ему потребуется очень много энергии.
Это и ответ на вопрос — какие пропеллеры выбрать для двигателя — смотрим таблицу и выбираем наиболее эффективные.
Регуляторы оборотов (ESC) для двигателей
После того, как вы выбрали двигатели, теперь к ним нужно выбрать регуляторы оборотов.
РекомендуемESC регуляторы оборотов, что это, как они работают и как выбрать
Здесь опишу кратко, так как уже есть статья выше: смотрим таблицу для двигателя и выбираем максимальный ток, который они могут потреблять, вот вам нужны именно такие регуляторы, в нашем случае 30 Ампер.
Рекомендованные двигатели
| Фото | Название | KV | Ссылки |
| Emax RS2205S | 2300KV | Aliexpress | Banggood | |
| Racerstar Racing Edition 2306 | 2700KV | Aliexpress | Banggood | |
| Readytosky 2205-2300(дешевые, но хорошие, для новичков) | 2300KV | Aliexpress | |
|
Racerstar Racing Edition 2205 |
2300KV | Aliexpress | Banggood | |
| BrotherHobby Returner R4 2206 | 2450KV | Aliexpress | Banggood | |
| Dragonfly Hurricane 2207 | 2500KV | Aliexpress | |
| T-Motor F40 III 2306 | 2400-2750KV | Aliexpress | Banggood |
Выводы
Надеюсь, что объяснил подробно, а если у вас остались вопросы — задавайте их в комментариях, помогу.
Итак: считаем общий вес дрона и умножаем на 2. Далее берем тягу 1 мотора и умножаем на 4 (если у вас 4 двигателя). Если тяга выше веса, который мы умножили на 2, то двигатели вам подходят.
Но помните, что для гоночного квадрокоптера лучше брать коэффициент 3:1, где 1 это вес дрона, то есть при весе 500 грамм, тяга двигателей должна быть не менее 1500 грамм.
Если вы нашли ошибку или ссылку, которая не работает, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Доброго времени суток, дорогой читатель. Сегодня мы поговорим о том, что поднимет твой летательный аппарат на новые высоты… ну или хоть на какие-то. Речь пойдёт об электромоторах. Я расскажу тебе о том, как выбрать двигатель для квадрокоптера твоей мечты, и о многих других нюансах, связанных с этой темой. Поехали!
Коллекторные vs бесколлекторные
Первым, с чем ты столкнёшься при выборе будут эти два термина. Это две разных реализации двигателей. Главное отличие – расположение обмотки.
Коллекторные
Обладает щеточно-коллекторным узлом. Коллектор, это набор контактов (обмоток), расположенных на роторе, и щётка – скользящий контакт, расположенный на статоре. Как раз наличие этой щётки и убавляет ресурс коллекторного мотора, ибо создаёт трение. Двигатель начинает вращаться при подаче на него постоянного тока, а направление вращения зависит от полярности оного. Плавно разгоняются и замедляются.
Преимущества
- Маленький вес и размер
- Низкая стоимость
- Прост в ремонте
Недостатки
- Низкий КПД
- Низкая скорость вращения
- Перегрев
- Быстрый износ
Бесколлекторные (бесщёточного типа)
Состоит из ротора с постоянными магнитами и статора, с обмотками. Изменение направления вращения осуществляется изменением полярности (Нужно поменять два провода из трёх). Разгон и замедление происходят очень быстро (рывком). Имеют разное количество полюсов. Чем их больше, тем медленнее, но с большим усилием, вращается ротор.
Преимущества
- Высокая скорость вращения
- Износостойкость
- Защищённость от внешних воздействий
Недостатки
- Стоимость
- Сложный ремонт
Тут есть нюанс. Устройство двигателя бесколлекторного типа может отличаться.
- Inrunner – Стандарт. Ротор с постоянными магнитами вращается в статоре с обмотками.
- Outrunner – Нестандарт. Здесь ротором выступает корпус, который вращается вокруг статора с обмотками.
Характеристики двигателя
Мощность (потребляемая)
Измеряется в ваттах. Чем больше мощность, тем быстрее кончится батарея. Тут всё просто
Вес
Чем больше вес, тем мощнее и медленнее (обычно). Важно помнить, что вес самого движка нужно учитывать при расчёте веса, который он должен поднять.
Энергоэффективность (КПД)
Комплексное понятие, которое зависит ещё и от батареи, контроллера, пропеллера, и даже проводов. Тут подробно останавливаться не буду- чем выше, тем лучше. Двигатель с КПД 70% тратит 70% потреблённой энергии на полёт, а 30% на обогрев окружающей среды и приближение тепловой смерти вселенной. Для бесколлекторных нормой является 90%, а для коллекторных 70%.
Температура нагрева в работе
Как ты уже понял- напрямую зависит от КПД. Чем больше греется, тем больше тратит энергии впустую.
Балансировка и уровень вибрации
По сути, это качество исполнения. Есть такая вещь как допуск. Этот те пределы, в которых отклонение от идеала не считается проблемой. Чем выше точность изготовления, тем более соосной будет система, и тем меньше будет вибраций. Иногда лучше не брать самое дешёвое.
Вибрация в двигателе ускоряет его износ, износ прочих деталей, раскручивает винтики и шумит. Неприятное явление.
Тяга
Тяга, она же подъёмная сила. Это тот вес, который может поднять двигатель (включая самого себя). Но это не значит, что для двухкилограммового квадрокоптера нужно четыре двигателя. Нужен запас тяги, нужно учесть помехи, и банальную не идеальность моторов.
Формула будет примерно следующей.
KV
Это достаточно сложный параметр – обороты на вольт без нагрузки. То есть если мы имеем моторчик в 1000 kv, то при подключении его к источнику тока с напряжением 12 вольт, он выдаст 12 000 оборотов в минуту (KV*U). Однако, это всё крайне теоретически.
На практике есть нагрузка, которую создаёт пропеллер, и создаваемое им сопротивление воздуха. Из этого следует, что обороты будут ниже, или их не будет вообще, так как от КВ зависит крутящий момент. Чем выше параметр КВ, тем меньшее усилие развивает электродвигатель.
Для понимания процесса (грубый пример).
Так как электродвигатель работает из-за перемены полярности электромагнитов с определённой частотой, то кв, по сути, характеризует частоту, с которой изменяется полярность магнитов, к которым притягивается постоянный магнит. для простоты примем, что постоянный магнит на роторе. Если всё идёт по плану, то ротор проходит путь от одного переменного магнита до другого, после полярность меняется, и он идёт дальше.
Если слишком часто менять полярность, или увеличивать нагрузку, то ротор просто не успеет разогнаться и преодолеть нужный путь, и его начнёт притягивать обратно, или же он вообще не сдвинется с места. Это похоже на пробуксовку колеса авто на льду. Чем выше скорость вращения и вес авто, тем больше оно будет проскальзывать, и меньшее усилие развивать.
В итоге, никто не знает сколько нужно, ибо параметр не поддаётся простому определению. Можно просто ориентироваться на следующие цифры. Лёгкий гоночный коптер с маленькими пропеллерами имеет KV 2100—2500, а для тяжёлых, многокилограммовых аппаратов нужно брать что-то в районе 200-900 KV.
Как правильно выбрать
Есть несколько основных параметров, исходя из которых придётся выбирать. О них ниже. Прежде всего, советую перейти на сайт калькулятора Ecalc, и ознакомиться с калькулятором. Он позволит как подобрать примерную комплектацию коптера, так и рассчитать полётных характеристики уже готовой сборки. Расчёт моторов стоит начать именно с него.
Общий вес и необходимая тяга
Это пункт планировки, и возможно важнейшие характеристики. Нужно чётко понимать – сколько будет весить квадрокоптер. В общий вес идёт всё, включая пропеллеры, провода и полезную нагрузку. Исходя из формулы расчёта тяги, для достижения хороших полётных характеристик, двигатели твоего коптера должны поднимать его вес, помноженный на два.
Размер рамы и пропеллера
От размера и конфигурации рамы зависит то, сколько двигателей тебе придётся поставить, и на сколько большую диагональ пропеллеров ты сможешь использовать. Сейчас не буду вдаваться в подробности конфигурации, и рассказывать о том, как правильно подобрать раму. Просто напомню, что это ответственный узел, и на нём будет держаться всё, в том числе и тяжёлые, вибрирующие двигатели.
Запомни три простых правила.
- Тут важно не промахнуться с размером. Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
- Жёсткость рамы и её вес очень важны. Если есть возможность, то бери с запасом по прочности. Очень хорошо тебя показывают композитные материалы (карбоновая рама – предел мечтаний)
- Резьбы в пластике или вообще не могут считаться за резьбы, или являются одноразовыми. Ищи или металлические вставки, или думай, как ещё зафиксировать болты
От размера лопастей зависит поведение дрона в воздухе. Большая диагональ даст большую подъёмную силу и устойчивость, в ущерб маневренности, и наоборот. Здесь надо отталкиваться от своей цели. Так же нужно учитывать то, что пропеллер создаёт нагрузку на двигатель. Обычно рекомендованный размер будет указан в спецификации.
Питание
Рекомендуемый аккумулятор тоже можно подсмотреть в спецификации. Обычная банка имеет номинальное напряжение 3.7в. При последовательном соединении суммируется напряжение, а при параллельном – ёмкость (она же время полёта). Это значит, что если ты видишь рекомендованный аккумулятор 2-3S Li-po (7,4-11,1V), то тебе потребуется два, или три последовательно соединённых литий-полимерных аккумулятора и соответствующая плата питания. В этом диапазоне всё будет работать (конечно, чем меньше- тем слабее). Параллельно можно суммировать только одинаковые блоки, но зато сколько душе угодно.
Маркировка двигателей для квадрокоптеров
На самом деле стандарта нет. Каждый лепит на свою продукцию что захочет. К счастью, есть общепринятые нормы, которые соблюдает большинство.
Первая буква отражает качество изготовления.
- «V» серия специально для ответственных мультикоптеров, изготовлена из лучших материалов при высочайшей точности сборки. Обычно, это гоночные электродвигатели, которые вращаются намного быстрее обычных
- «X» серия для моделей самолётов и мультикоптеров – середнячков. Хороший КПД, качество и сборка по терпимой цене
- «A» серия – Бюджетное решение, которое будет чуть хуже, чем предыдущие, но всё так же будет хорошо работать. Не стоит её пугаться
Первые четыре цифры, это параметры магнитопровода. Первые две –диаметр, вторые две –толщина набора. Они, на самом деле тебе не очень нужны. Не заморачивайся. Их тебе нужно знать в основном для того, чтобы понимать следующий параметр.
Спонтанный ликбез: Магнитопровод, это та часть двигателя или трансформатора, на которую намотана обмотка. Он набирается из пластин.
Количество витков
От количества витков зависит толщина провода, при равных параметрах магнитопровода. На один и тот же магнитопровод можно намотать 13 или 15 витков (к примеру). Чем больше витков, тем меньше диаметр сечения провода и выше внутреннее сопротивление. Отсюда, при равном питающем напряжении, при большем количестве витков, ток и обороты будут ниже. Это подтверждается параметром KV. Для бесщёточного двигателя с 15 витками оно будет ниже, чем у того же мотора, но с 13 витками.
Последняя буква – вид трёхфазного подключения – звезда или треугольник (Y/* или T/Δ соответственно). Снова не буду грузить электроникой, да и в случае с квадрокоптерами подключение не так важно.
- Мотор подключенный через звезду будет более мягко и плавно разгоняться, но не сможет развить максимальную заявленную мощность
- Подключение через треугольник даст более резкий набор скорости и полную заявленную мощность, но потребует намного больший пусковой ток
Возьмём для разбора такую маркировку A2212/15T.
Особенности моторов
CW и CCW
Это направления вращения, на которые рассчитан мотор. CW – по часовой стрелке, CCW – против. На самом деле направление вращения всегда можно изменить без потерь. Этот параметр скорее относится к креплению. При вращении в неправильную сторону мотор может разбалтываться, из-за особенностей крепления, или, если пропеллер фиксируется на резьбовом соединении, он будет откручиваться.
Тип магнитов
Мощность двигателей, и их кпд во многом зависят от силы постоянных магнитов ротора. Можно брать исключительно неодимовые магниты. Это, в основном, касается покупок из Китая, где могут подсунуть с виду работающий, но слабенький агрегат.
Кстати, важно, что неодим является крайне хрупким материалом, который плохо переживает удары. Ронять его не стоит, ибо могут появиться микротрещины, которые приведут к потере мощности.
Полый вал
Особым понтом считается полый вал двигателя. Если есть возможность, то стоит брать именно такой. Он совершенно не уступает по прочности цельному валу, так как центральная часть не нагружено, но немного экономит вес.
Шплинты и пружинные стопорные шайбы E clips, C clips
Из-за вибраций, создаваемых моторами и пропеллерами, винтики могут откручиваться или ослабевать. Это серьёзная проблема, ибо конструкция всегда должна быть жёсткой. Решается проблема использованием шплинтов или стопорных шайб.
Шплинт – вариант не самый лучший. Только для того, чтобы что-нибудь не отвалилось. Винтики им укрепить не получится.
Пружинная шайба – По сути, это небольшая пружинка, которая распирает болт в резьбе, тем самым делает его выкручивание проблематичным. Это отличный вариант для крепления любых узлов к раме, однако использовать его имеет смысл только если под шайбой имеется твёрдая поверхность (мягкий пластик не в счёт)
Итог
Дроны беспилотники, это достаточно сложный и точный механизм, который требует тщательного подхода к выбору комплектующих. Надеюсь, после прочтения этой статьи тебе стало понятно чуть больше о движущей силе твоего летательного аппарата.
И как всегда, банальное, но очень важное напутствие – думай, прежде чем делать. Даже куча потраченных денег на самое лучшее оборудование не гарантирует то, что оно будет работать хорошо. Отталкивайся от того, что нужно именно тебе. Читай, узнавай, анализируй.
Если остались вопросы — задавай в комментариях на сайте. Мы постараемся на них ответить. И самое главное, без чего твой коптер точно не полетит. Подписывайся на наши группы в социалках, и делись записями с друзьями (кнопки для этого ты найдёшь внизу). Удачи, пилот, до новых встреч!

Этот небольшой гайд поможет понять основные принципы работы электромотора и вы сможете выбрать правильную модель для квадрокоптера, с нужными вам характеристиками, если вы собираете его своими руками.
Если для вас все это в новинку и вы первый раз строите свой квад, то вам нужно понимать связь между тягой мотора и весом летательного аппарата. Это важно при постройке квадрокоптера любого размера. Хотя есть вы собираете себе мини квадрокоптер, то можете сразу переходить к разделу «Размер мотора».
Общий вес летательного аппарата
Во-первых, необходимо знать общий вес летательного аппарата. Не переживайте, если в первый раз вы точную цифру посчитать не сможете. Но он точно должен включать следующее: рама, полетный контроллер, плата управления, моторы, лопасти, электронный регулятор скорости, батарея и загрузка типа HD камеры. Более подробно про этот список я уже рассказывал в статье.
Размер рамы
Во-вторых надо определиться с размером рамы, на которой вы и будете собирать собственно сам квадрокоптер. Зная размер рамы можно будет уже знать и размер лопастей.
Необходимая тяга
После решения вопросов с весом и размером рамы, можно будет хотя бы грубо определить необходимую тягу, которую должны давать моторы с заданными лопастями, чтобы поднять летательный аппарат в воздух.
Соотношение тяги и веса
Главное правило — моторы должны обеспечить как минимум двойную тягу относительно общего веса квадрокоптера. Это необходимый минимум, с которым аппарат сможет взлететь и им можно будет нормально управлять. Если тяги будет мало, то управление будет с заметными лагами, реагировать на команды он будет крайне вяло, а в некоторых случаях вообще не сможет взлететь.
Например, если вы построили квадрокоптер, у которого общий вес 1 кг, то общая тяга моторов при максимальной нагрузке должна составлять 2 кг. или 500 гр. (для 4-х моторного аппарата) на каждый мотор. Но было бы не плохо иметь все таки побольше тяги, лишней она не будет.
Для гоночного дрона соотношение тяги и веса должно быть на много выше в сторону тяги. Вполне нормально для скоростных мини квадриков иметь соотношение 8:1 и даже 10:1. При таком раскладе аппарат будет очень маневренным, скоростным, динамичным. Но тут надо учитывать тот факт, что при большом уровне тяги повышается сложность управления и новичку с таким дроном совладать будет крайне сложно, т.к. даже еле заметное движение стика будет давать сильный толчок, так можно и в космос квадрокоптер запустить :D.
Если вы собираетесь просто летать в свое удовольствие, то я бы рекомендовал пытаться собрать аппарат с соотношение тяга:вес — 3:1 или 4:1. Это даст вам хороший контроль в управлении и можно будет в будущем расширить загрузку, повесить камеру посерьезнее или батарею с большей емкостью. Но если вы строите гоночный квадр, то тут ни чем ограничиваться не стоит, делайте его с таким соотношением, с которым вы сможете справиться.
Размер мотора
Размер электромотора для радиоуправляемой техники обозначается четырьмя символами — AABB. AA — это ширина статора, BB — высота статора или его диаметр. Обозначать принято в миллиметрах (мм). Тут есть небольшая закономерность: чем выше статор, тем больше мотор выдает мощности на больших оборотах, а чем он шире, тем больше тяги на низких оборотах.

Что такое статор бесколлекторного мотора — статор это стационарная, неподвижная часть мотора в середине, которая обернута в медную обмотку. Обмотка состоит из множества слоев тонкого металла, которые спрессованы вместе и каждый имеет тонкий изоляционный слой.
Размер лопастей, которые подойдут для того или иного электромотора определяется размером вала. К примеру, моторы для лопастей с размером от 10 до 15 см имеют вал М5. В современных моторах вал объединен с кожухом мотора (как на картинке).
Константа скорости (KV)
Константа скорости или постоянная скорость (KV) это очень важный параметр при выборе бесколлекторного мотора для квадрокоптера. Она обозначает теоретическое увеличение оборотов вала мотора без нагрузки при увеличение напряжения на 1 Вольт. Например, если запитать мотор 2300 KV батареей 3S на 12,6В, то вал буде крутиться со скоростью 28980 оборотов в минуту (2300 х 12,6), без лопастей. Но это приблизительная величина и она всегда указана на маркировке мотора.
При установке лопастей на мотор, скорость его вращения, конечно же сократиться, из-за сопротивления воздуха. Чем выше KV, тем быстрее этот электромотор может раскручивать лопасть, но вот низкий KV означает, что у мотора большая тяга. Так что обычно большие лопасти мы ставим на моторы с низким KV, а короткие на большие KV.
Значение (KV) константы скорости определяется количеством медной обмотки на статоре и мощностью магнитов. Если в общих чертах, то здесь обратная зависимость между количеством обмотки и показателем KV.
Если вы попытаетесь установить на электромотор с высоким KV большие лопасти, то мотор будет пытаться раскрутить их как можно быстрее, будет сжирать много энергии, генерирую при этом излишнее количество тепла. В итоге мотор можно легко спалить.
Что такое N и P?
Вы наверное видели на маркировке мотора нечто подобное — «12N14P». Число перед N означает количество электромагнитов в статоре, а число перед P — количество постоянных магнитов в моторе. И большинство электромоторов, которые вы найдете для квадрокоптера будет иметь как раз такое обозначение — 12N14P. Но моторы с низким KV могут иметь несколько меньшее количество магнитов, для более эффективного набора тяги. Но сильно на этот показатель обращать внимания не нужно при выборе мотора, просто знайте, что это обозначает, вдруг вас кто нибудь спросит.
Размер рамы => Размер лопастей => Размер мотора
Зная размер рамы, мы можем примерно определиться с размером электромотора, который нам нужен. А все это потому, что размер рамы ограничивает размер лопастей, а для каждого размера лопасти и нужно подбирать мотор (скорость вращение, тяга, см. выше). И вот тут как раз вступает значение KV. Вы должны быть уверены, что у мотора будет достаточно тяги, чтобы крутить лопасть, а способность крутить лопасть зависит от размера статора. Короче, больше статор, больше KV, больше потребление тока.
В таблице ниже можно посмотреть зависимость размера рамы, размера лопастей, размера мотора и значения его KV.
| Размер рамы | Размер лопасти | Размер мотора | Значение KV |
| 150 мм или меньше | 3″ или меньше | 1105 -1306 или меньше | 3000KV или выше |
| 180 мм | 4″ | 1806 | 2600KV – 3000KV |
| 210 мм | 5″ | 2204-2208, 2306 | 2300KV-2600KV |
| 250 мм | 6″ | 2204-2208, 2306 | 2000KV-2300KV |
| 350 мм | 7″ | 2208 | 1600KV |
| 450 мм | 8″, 9″, 10″ или больше | 2212 или больше | 1000KV или ниже |
Вольтаж и потребление тока
Так же важно понимать, что вольтаж оказывает большое влияние на выбор как мотора так и лопастей. При большом вольтаже мотор будет стараться крутиться сильнее и от сюда будет потреблять больше энергии.
Читаем технические характеристики мотора
При выборе электромотора для квадрокоптера обязательно проверяйте его технические характеристики. Учитывайте все то, что мы обговорили выше. Вот, к примеру, модель Micro Brushless Outrunner 18-11 2000KV.

- KV — 2000
- Вес — 10 гр.
- Макс.потребление тока — 5,5 А
- Сопротивление — 0
- Макс. вольтаж — 7 В
- Мощность — 0
- Вал — 2 мм
- Длина — 22 мм
- Диаметр — 18 сс
- Общая длина — 30 мм
- Рекомендуемые лопасти — 7″ х 5″
- Рекомендуемая мощность — 7,4 В
- Тяга — 130 гр. / 5000 об/мин
Основные факторы, которые влияют на эксплуатационные характеристики мотора
Предположим, вы уже определились с размером мотора и уже подобрали несколько моделей, из которых и выбираете. Чтобы выбрать лучший мотор, нужно учитывать следующие факторы:
- Максимальная тяга
- Потребление тока
- Эффективность
- Вес
Подумайте, что вы хотите в итоге получить и уже на основе этого делайте окончательный выбор.
Тяга и мощность
Первое, на что смотрят большинство покупателей электромоторов — это тяга. Чем больше тяга, тем больше ускорение, но тут надо еще смотреть на эффективность. Возможно эта тяга будет для вас избыточна, а мощные мотор очень прожорлив и ваша батарея в мгновение ока будет высаживаться в ноль. Если ваш квадрокоптер поглощает большое количество тока при большом ускорении, то ваша батарея должна быть способна выдавать такие показатели, а иначе вам обеспечен перегрев батареи и она еще может вздуться из-за этого.
Но при выборе мотора нельзя ограничиваться только мощностью и тягой. Есть и другие важные параметры.
Вес мотора
Вес мотора очень часто игнорируют неопытные сборщики квадрокоптеров, но это немаловажные фактор. Т.к. моторы устанавливаются по углам рамы, то соответственно они оказывают большое влияние на отзывчивость дрона при управлении. Чем тяжелее мотор тем больше момент инерции квадрокоптера и тем сложнее изменяется угловая скорость в полете. На практике, такие тяжелые моторы при выполнении переворотов потребуют больше времени для набора необходимой угловой скорости, т.е. вы нажимаете на кнопку, а ваш дрон на доли секунды задумывается, пытаясь набрать обороты и выполнить маневр. Тяжелые моторы должны обладать большей тягой.
У самого мотора есть свой момент инерции. И опять, чем тяжелее мотор, тем больше ему самому нужно тяги и времени, чтобы раскрутиться до необходимых оборотов. Все это в итоге выливается в тормознутость аппарата, в его валкость, плохую отзывчивость и не точное управление. Для акробатических полетов и гонок, вес мотора играет одну из ключевых ролей.
Эффективность
Эффективность мотора обычно измеряется в граммах на ват (тяга/мощность). Важно оценивать эффективность на всем диапазоне газа. Некоторые моторы эффективны при низком газе и теряют эффективность, потребляя излишне много энергии при своих максимальных оборотах. Но неэффективный мотор не только сильно съедает и так ограниченную энергию в полете, тем самым сокращая его продолжительность, он также способствует просадкам напряжения. Неэффективный мотор может либо не выдавать необходимой тяги или потреблять излишний ток.
Дополнительные факторы, влияющие на эксплуатационные характеристики мотора
Не все характеристики той или иной модели электромотора производитель официально публикует, и кроме как на собственных тестах их нигде найти не удастся.
- Тяга
- Время отклика
- Температура
- Балансировка и вибрация
Тяга — это на сколько быстро мотор может увеличивать/изменять скорость вращения. Это влияет на точность управления и отзывчивость квадрокоптера во время полета. Большая тяга дает мгновенный отклик, т.к. скорость вращения меняется так же мгновенно. Большая тяга, так же позволяет ставить лопасти побольше (если рама конечно позволяет), правда в ущерб батарее. Если же ставить тяжелые лопасти на мотор с низкой тягой, то он вообще не будет способен раскрутить их до нужного значения. Но у высокотяговых моторов есть и свой недостаток — это вибрация, которую очень сложно устранить. Из-за повышенной реакции на команды возможны излишние ошибку в управлении и рыскание квадрокоптера
Время отклика — зависит напрямую от тяги, чем ее больше тем лучше отклик. Для оценки времени отклика можно посмотреть на сколько быстро мотор наберет обороты с 0 до максимального значения. И еще время отклика сильно зависит от лопастей.
Температура — магниты в мотора быстрее размагничиваются при высоких температурах, отсюда падение характеристик летательного аппарата. Чем холоднее мотор, тем он дольше проживет.
Вибрация — Если мотор плохо сбалансирован или плохого качества сборки, это приведет к повышенной вибрации во время полета. Поврежденные или несбалансированные лопасти так же ведут к излишней вибрации.
Некоторые другие особенности моторов для квадрокоптеров
Так много переменных, которые могут повлиять на итоговые характеристики мотора. К примеру, моторы с одним и тем же размером статора, одинаковым KV имеют разную тягу и потребление тока при одинаковых лопастях. И все это из-за различий в конструкции (разные магниты, обмотка, корпус, вал и т.п.). Следующие особенности могут неким образом повлиять на эксплуатационные качества электромотора и даже могут изменить его характеристики.
Полый вал
Это позволяет использовать более прочные и тяжелые металлы или наоборот понижает вес мотора.
Типы магнитов
Магниты, которые устанавливаются в бесколлекторные электромоторы обозначаются как N52, N54 и т.д. Чем выше число, тем больше сила магнитного поля и тем больше тяга и лучше отзывчивость мотора.
Толщина статора
Чем тоньше, тем лучше, тем больше мощности, меньше генерируется тепла и лучше эффективность.
Обмотка/Толщина проволоки
Толщина проволоки в обмотке вокруг статора играет большую роль. Толстая обмотка обладает меньшим сопротивлением, что позволяет пропускать больше тока. А тонкая обмотка приводит к меньшей пропускной способности и большему сопротивлению. Однако толстая обмотка требует больше места, что означает меньшее количество витков и от сюда меньше противоэлектродвижущая сила (оборотная ЭДС). А это в свою очередь напрямую влияет на константу скорости (KV). Чем больше витков проволоки в обмотке, тем больше оборотная ЭДС при текущей скорости вращения и от сюда меньше KV.
Воздушный зазор
Это расстояние между постоянными магнитами и статором. Магнитное поле уменьшается нелинейно с расстоянием и сократив его можно заметно увеличить мощность мотора. Но меньший зазор дает не только больше мощности и энергоэффективности, но и улучшает тягу и отзывчивость.
Дугообразные магниты
Электромоторы с дугообразными магнитами лучше, их можно расположить ближе к статору и они сплошные, без пропусков.
Сечение проволоки/количество витков в обмотке
Обмотка в моторе определяет его мощность и потребление тока. Меньше обмотка = меньше сопротивление = больше тока может пройти = больше частота оборотов. Вот почему моторы с большим значением KV имеют обмотку в статоре меньше.
Но у этого есть и обратная сторона. При меньшей обмотке у нас будет меньше сила магнитного поля и от сюда меньше тяги. И еще, чем больше проходит тока через обмотку, тем больше она нагревается и тем меньше общая эффективность.
Чтобы найти компромисс производители пошли путем увеличения обмотки за счет использования толстой медной проволоки. Это уменьшит сопротивление в обмотке, увеличит мощность без ущерба в скорости и тяге. А чем больше сечение проволоки, тем больше может пройти тока без чрезмерного нагрева.
Но вот чем толще проволока и больше обмотка, тем тяжелее сам мотор. Кроме того, обмотка занимает в корпусе мотора уже много места. И вот поэтому мощные моторы должны быть большими.
Крепление колокола мотора
Для крепление колокола мотора на месте используется несколько типов фиксаторов: C-clip, E-clip и болт. У каждого типа есть свои плюсы и минусы и точно сказать какой из них лучший я затрудняюсь.

Вообще, крепление на болту более удобно для последующего обслуживания мотора, колокол гораздо легче снять и потом снова одеть. Но тут есть риск перетянуть болт и заклинить его в валу, что может привести к затруднению при вращении. Бывали случаи когда болт самораскручивался и колокол улетал. Но и C-clip тоже страдает от подобных проблем самопроизвольного расцепления.
Закрытый и оголенный низ мотора
Классический корпус электромотора предполагает полностью закрытую конструкцию. Но сейчас замечена тенденция на открытый низ. И тут и там есть свои положительные и отрицательные моменты.

Закрытый (слева) и открытый (справа) низ электромотора
Конструкция с закрытым низом предполагает большую прочность, а вот открытый низ — меньше веса, легкость. Открытый мотор легче чистить от грязи, в отличии от закрытого, в котором грязь может набиваться со временем, мешая ему работать.
С открытым мотором лучше видно как сильно затягивать болты при его креплении на раму. А то бывали случаи когда их перетягивали или болты были слишком длинными и ими повреждали обмотку.
Прямое или обратное вращение
Маркировка у моторов может иметь значения CW и CCW, что означает Clockwise (По часовой стрелке — Прямое), Counter Clockwise (Против часовой стрелки — Обратно). Но это совсем не означает, что мотор может вращаться исключительно в этом направлении. По факту, как ты его подключишь к питанию, так он и будет вращаться. Различие у них не в этом, а в резьбе вала.
В квадрокоптере должно быть 2 мотора с прямым вращением и 2 с обратным, так чтобы гайки на валах все время находились в затянутом состоянии.
Чтобы точно определить правильная ли у вас резьба, т.е. правильный ли вы ставите мотор на то или иное место, приложите гайку к валу и начните вращать мотор в ту сторону, в которую он по вашей задумке должен вращаться. Если гайка закручивается, значит все у вас правильно.
моторсвоими руками2017-12-11Используемые источники:
- https://profpv.ru/kak-vybrat-dvigateli-dlya-kvadrokoptera/
- https://drongeek.ru/novichkam/vybiraem-dvigatel
- https://topdrones.ru/indetails/kak-vybrat-pravilnyj-elektromotor-dlya-kvadrokoptera.html

 Пропеллеры для квадрокоптера — основные параметры и как подобрать
Пропеллеры для квадрокоптера — основные параметры и как подобрать Двигатель Тойота 3S FE: характеристики, неисправности и тюнинг
Двигатель Тойота 3S FE: характеристики, неисправности и тюнинг Тахометр, счетчик моточасов для лодочного мотора
Тахометр, счетчик моточасов для лодочного мотора