Если ты собрался собирать свой квадрокоптер, то тебе нужно в первую очередь знать о том, как заставить «это» взлететь. Здесь есть два важных параметра – пропеллеры, и двигатели. Пропеллеры для квадрокоптера могут быть самыми разными, и каждый несёт в себе совой смысл. Сегодня я объясню тебе основные понятия и принципы, чтобы ты знал, как подобрать пропеллеры для своей модели. Располагайся, заваривай пельмешки, будет долго, и немного больно. Но тебе понравится.
Сразу оговорюсь, что в любом проектировании бывает достаточно много НО. Всё, что я скажу далее, это стартовые знания. Не бойся включать голову и задавать вопросы. Нет такой информации, которую нельзя найти в гугле, или спросить на форуме. Главное- умение ей пользоваться. Поехали!
Основные понятия

- «В идеальном мире» — чисто теоретическое понятие, не берущее в расчёт побочные факторы
- Параметр «длинна», это и есть длинна пропеллера. Если точнее, то диаметр окружности, описываемой лопастями
- «Тяга», это сила, которая создаётся винтом. Она компенсируется остальными силами реакции (сопротивление воздуха, гравитация). Из этого следует, что пока тяга больше сопротивления – коптер будет разгоняться в направлении, противоположном вектору тяги.
Основные параметры
Количество

Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2+) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
Направление вращения

Для электродвигателей есть два направления вращения. CW – вращение вала по часовой стрелке, CCW – вращение вала против часовой стрелки. Направления нужно или чередовать (так как каждый пропеллер создаёт реакционную силу, которая стремится развернуть то, к чему он прикреплён, в направлении вращения), или размещать соосно на одном луче (тогда реакционная сила одного компенсирует оную у второго. Это более сложная компоновка. Используется, к примеру, на вертолёте «чёрная акула»).
На направление вращения самого пропеллера указывает поднятая кромка. Она смотрит в сторону вращения.
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям. На самом деле, любой, даже небольшой дефект лопасти, скорее всего, будет фатален. Там уже не важно, расколется она, или просто помнётся. Всё равно ты её меняешь.
Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
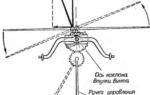 Как управлять вертолетом по высоте. Что в вертолёте вместо руля (часть 3)
Как управлять вертолетом по высоте. Что в вертолёте вместо руля (часть 3)Вес
От веса зависит отзывчивость дрона по оси рысканья. Однако, с этим надо быть аккуратным, ибо также увеличивается нагрузка на мотор квадрокоптера.
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
Качество
Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
Спецификация
Есть два типа обозначений.
LLPPxB
- L- длинна
- P- шаг
- B- количество лопастей (для двух лопастей может не указываться)
Например, 5045×3 – длинна 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда приходится гадать. Тот же пропеллер может обозначаться 0545×3.
LxPxB
 Как правильно подобрать двигатель для квадрокоптера?
Как правильно подобрать двигатель для квадрокоптера?Например, 5×45х3 – длинна 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда в конце присутствует буква R или C. Она определяет направление вращения пропеллера.
- R – по часовой стрелке
- C – против часовой стрелки
Иногда в конце присутствует обозначение профиля лопасти. (подробнее смотри выше «виды лопастей»)
- N – нормальная (заострённая)
- BN – закруглённая
- HBN – промежуточная
Методы крепления и крепежи
Пропсейвер – Хороший вариант для проведения эксперементов, когда надо часто снимать и надевать пропеллер. Выглядит как втулка, которая притягивается к валу двигателя двумя винтами. Сам пропеллер надевается сверху, и притягивается резинками к выступающим винтам. Далеко не полетит, но можно побаловаться.
Цанговое крепление – рабочий вариант. На вал насаживается цанга (та, что с прорезями), потом зажимная втулка, пропеллер и шайба. Крепление надёжное и идеальное для полётов.
Outranner – Это не крепление, это разновидность бесколлекторного мотора, в котором ротор (вращающаяся часть) находится снаружи. На их верхней поверхности обычно находится несколько резьбовых отверстий, в которые крепится переходник (коих несметное количество).
Балансировка
Когда ты сэкономишь на пропеллере, ты точно удивишься тому, что он не отбалансирован. Из-за этого он будет вибрировать, на камере коптера ты будешь наблюдать эффект «желе», резьбовые соединения будут ослабевать, а моторы будут изнашиваться очень быстро. Надо балансировать.
Для этого тебе понадобится:
- Пропеллер
- Скотчсуперклей (на свой страх и риск)
- Мелкозернистая наждачная бумага
- Специальный инструмент — балансировщик пропеллеров
- Уровень
- Балансировщик устанавливаешь строго горизонтально.
- Устанавливаешь пропеллер на ось, в горизонтальное положение. Отпускаешь. Одна из лопастей падает вниз.
- Берёшь наждачку, и с внутренней стороны поднявшейся лопасти (с вогнутой) снимаешь немного материала. Не переусердствуй.
- Возвращаешь лопасти в горизонтальное положение. Если одна из них падает – повторяешь предыдущий пункт. Если нет- идём дальше
- Так как балансировщик тоже не лучшего качества- переворачиваешь ось и смотришь по новой. Нужно поймать момент, когда вне зависимости от направления оси, пропеллер будет сбалансирован.
- Молодец.
- Но не совсем. Теперь ступица. Устанавливаешь пропеллер вертикально. Если пропеллер наклоняется вправо- делаешь мазок лаком на левой стороне.
- Добиваешься баланса
- Меняешь направление горизонтальной оси пропеллера. Если всё по-прежнему в порядке- ты отбалансировал пропеллер. Надеюсь у тебя не октокоптер.
- Молодец!
Калькулятор Ecalc
Крайне удобный калькулятор, которые находится на официальном сайте Ecalc. В нём ты сможешь задать те запчасти, которые будешь использовать для своего проекта, а он выдаст тебе (очень) примерную модель поведения коптера.
 Шарико-винтовые передачи (ШВП) для ЧПУ
Шарико-винтовые передачи (ШВП) для ЧПУДавай рассмотрим его поближе, так как он тебе точно пригодится.
Основное
- Тут ты выставляешь основные параметры своей сборки
- Полный вес модели можно указывать «без ВМГ» (винтомоторная группа = пропеллеры и моторы). При выборе пропеллеров и моторов калькулятор сам учтёт их вес
- Количество винтов – соосные винты, это два винта расположенных друг над другом, а одноосные это один винт на одном луче коптера. Для простоты, в нижнем правом углу, калькулятор рисует тебе конфигурацию
- Размеры рамы- По диагонали, от одного конца луча, до другого
- На остальное пока можешь забить. Оно уже стоит по стандарту. Высота, температура и давление может пригодится для расчёта полётных характеристик для разных высот
Аккумулятор
- Из списка выбираешь нужный, или максимально похожий аккумулятор, и состояние заряда «номинал»
- В поле «P» пишешь количество параллельно соеденённых аккумуляторов (если нужно)
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
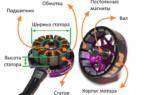
Мотор
Выбираешь производителя мотора из списка, и проверяешь по параметрам. Если похоже, то всё нормально, если нет, то продолжаешь «Охлаждение»
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Всё, можно нажимать «рассчитать», и наслаждаться результатами с 15% погрешностью. Я не зря сказал о погрешности. Все эти расчёты годятся только для того, чтоб прикинуть – полетит, или нет. Более точной информации ты не получишь.
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
RashVinta
Программа для расчёта параметров пропеллера для летательного аппарата.
Она может работать с тремя наборами исходных данных.
- Мощность двигателя + диаметр винта, который вам нужен
- Мощность двигателя + частота вращения
- Диаметр винта + шаг
В первом варианте
- Галочку на «расчёт по диаметру винта»
- Вводите нужный диаметр в см
- Вводите мощность двигателя в лошадиных силах, подсмотренную в параметрах двигателя (чтоб получить лошадей из кВт используй формулу кВт*1.36)
- Вводи максимальную скорость, которую позволит развить твой винт
- Введи среднюю скорость в поле «Скорость расчётная»
- Нажми кнопку расчёт
В результате ты увидешь необходимый шаг винта и частоту вращения.
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!
Что нужно знать: основные определения и понятия
Пропеллеры для квадрокоптеров подразделяются по следующим критериям:
- какая у них длина;
- какой у них шаг;
- какая площадь пропеллеров;
- какое направление вращения;
- какая у них форма;
- и сколько лопастей на каждом пропеллере;
Длина пропеллера и его шаг
Длина и шаг являются главными параметрами определяющие тягу. Во время вращения винта, лопасти образуют диск. Диаметр этого диска и есть длина. Под шагом понимают расстояние, которое винт может преодолеть за одно вращение, в некой плотной среде (если вспомнить шуруп, и то как он вкручивается в доску, то все становится понятно). Величина шага у лопастей квадрокоптера, зависит от наклона самих лопастей, то под каким углом они расположены (угол атаки).
Тяга считается сильной, когда винтомоторная группа (ВМГ) винтами перемещает большой объём воздуха. При увеличении длины, шага или какого-то одного из этих параметров, где скорость вращения остается неизменной, тяга винтов увеличивается. Вместе с этим образуется турбулентность за счет увеличения сопротивления воздуха. И как следствие, большой радиус пропеллера и угол наклона лопастей, потребует больших затрат энергии, за счет чего будет уменьшено время полёта.
Для аэрофотосъёмки идеально подойдут большие пропеллеры с малым шагом, а небольшие винты с большим шагом подойдут для гоночных дронов, которым важна скорость полёта.
Количество и форма лопастей пропеллеров
Стандартным вариантом принято считать пропеллер с двумя лопастями. На большинство маленьких квадрокоптерах ставятся винты с лопастями больше двух. Это позволяет обеспечить более равномерный поток распределения воздуха, и как следствие снизить уровень турбулентности. К тому же, за счет дополнительных лопастей увеличивается и подъемная сила. Таким образом, маленький диаметр винта с тремя (или более) лопастями, способен обеспечить силу подъёма, что и стандартный пропеллер с двумя лопастями и большим диаметром. Отзывчивость квадрокоптера, также зависит от количества лопастей у пропеллера, и чем больше их, тем отзывчивее дрон в полёте. Стоимость таких многолопастных винтов дороже стандартных, и есть сложности в изготовлении и отцентровки данных винтов. Такие винты следует покупать у производителей или официальных дилеров.
Присмотритесь на различия форм окончаний лопастей. Их подразделяют на три категории:
- Normal;
- Bullnose (BN);
- Hybrid Bullnose (HBN);
Винты Normal позволяют сэкономить расход аккумулятора за счет меньшей тяги, и благоприятно влияют на продолжительность полёта не вызывая дополнительного перерасхода энергии. На винтах Normal имеются заостренные наконечники. Равный диаметр винтов BN при их большой площади создает большую тягу. Такое преимущество сопровождается недостатком – уменьшение времени полёта из-за высокого потребления энергии. Имеющиеся утяжелители на кончиках реквизитов, способствуют увеличению крутящего момента и повышают скорость реакции квадрокоптера по оси рысканья. Что касается наконечников HBN, то они находятся между Normal и Bullnose.
Направление вращения
За направление вращение лопастей отвечают двигатели, которые разделяют на два типа:
- CW – крутит пропеллер по часовой стрелке;
- CCW – крутит пропеллер против часовой стрелки;
Принцип установки таких моторов зависит от схемы устройства квадрокоптера. Более наглядно схемы изображены на рисунке.
По кромке лопасти можно определить то, в какую сторону он вращается.
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
- прочность;
- эффективность;
- лёгкость;
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.
Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов – это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB – где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами – R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) – на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы – это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.
Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком – гайкой, особой формы.
На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео. Помимо качества записи видео, также страдают и двигатели. Постоянные вибрации оказывают негативное влияние на двигатели, подшипники и шерстни, тем самым увеличивая стоимость обслуживания квадрокоптера.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой). На более легкую лопасть можно наклеить скотчи или нанести на нее лак для ногтей, если таковой имеется под рукой. В случае если нет ни того ни другого, используйте суперклей.
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Калькулятор eCalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе +10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
RashVinta
RashVinta – программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
В первом случае устанавливаем флажок только на параметре “расчет по диаметру винта”. Указываем информацию о размере пропеллера, мощность двигателя, скорость полета – максимальная и средняя. Жмем “Рассчитать” и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем “Рассчитать” и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт “указать параметры винта”. Параметры диаметра и шага винта вносим в нужные поля. Жмем “Рассчитать” и видим данные по профилю лопасти винта, его изображение появляется в окне. Можно менять масштаб для его изучения. Все заключения по расчетам сохраняются в виде таблиц в формате date.html, предусмотренном в сборке программы.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт “Профиль с углом”. И еще можно увидеть точки, который были использованы для расчета – отметьте галочкой пункт “показать расчетные точки”. На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Заключение о сложности процедуры
Как вы уже заметили, работы по подбору и корректировке реквизитов, довольно сложная задача для новичка. Но я надеюсь, что эта статья будет полезна для любителей квадрокоптеров и другой беспилотной авиации, грамотно провести процедуру балансировки пропеллеров, их установки на квадрокоптер с самодельной конструкцией. А также избавиться от ошибок в работе ВМГ серийных моделей мультикоптеров.
—> —>
Пропеллеры для квадрокоптера, они же винты для квадрокоптера
 Пропеллеры для квадрокоптера в среде опытных пилотов называют коротко — «пропы».
Пропеллеры для квадрокоптера в среде опытных пилотов называют коротко — «пропы».
Для чего нужны пропеллеры? Для того, чтобы создать подъемную силу с помощью двигателя. Как правило, пропеллеры подбираются по 3 критериям:
- для какого стиля полетов
- для какой рамы
- для каких двигателей
Для какого стиля полетов
Здесь всего 2 типа — это гонки и съемка. Для съёмочного дрона как правило нужны большие и широкие пропеллеры, им не нужна большая скорость вращения и резкий разгон.
Для гонок нужны небольшие и тонкие пропеллеры, чтобы была возможность быстрого ускорения вращения и само вращение.
Для какой рамы
Обычно, в названии пропеллеров пишут для какой рамы пропы, например, для 250 рамы, это значит, что они подходят для рамы размером 250 миллиметров, но для 220 тоже подойдут.
Для каких двигателей
Для слабого двигателя не подходят огромные и широкие пропеллеры, он их не сможет быстро разгонять и поддерживать вращение, в итоге будет перегреваться под большой нагрузкой и сгорит. Например, если у вас двигатели 2205 2300KV, то вам подойдут пропы 5045. Но такие двигатели ставят на миникоптеры с рамами 210-250мм, а эти цифры уже можно найти и в самом названии пропеллеров. В общем все взаимосвязанно.
Прежде, чем устанавливать пропеллеры на квадрокоптер, вам нужно узнать, в правильную ли сторону будут крутиться моторы. Большинство квадрокоптеров летает на конфигурации Multiwii, выглядит она вот так: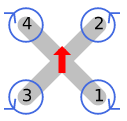
Красная стрелка — это направление, куда будет лететь квадрокоптер, т.е. вперед. Синие стрелки — направление вращения пропеллеров. Можно легко запомнить в какую сторону какой двигатель крутится: два передних мотора крутятся в сторону камеры, а два задних мотора крутятся от камеры.
Какие бывают пропеллеры
Пропеллеры бывают:
- 2-х лопастные
- 3-х лопастные
- 4-х лопастные
- 5-ти лопастные
На более менее серьезных и гоночных используются как правило 2-х и 3-х лопастные пропы. Выглядят они так:


Какие именно — 2 или 3-лопастные — это уже индивидуальный выбор каждого после полетов. Лично я долгое время летал на 3-лопастных. Пробовал 2-лопастные, но ощущение, как будто они не выдают нужную тягу, хотя по размерам были как и 3-лопастные, квадрик как-будто пробуксовывал перед разгоном. А вот на тройных такого я не наблюдал.
Но есть вариант, что я ошибся с выбором 2-х лопастных и у них был малый угол наклона.
И действительно, я набрался опыта и подобрал более дорогие и хорошие пропеллеры, причем 2-лопастные! Как оказалось, первые двухлопастные пропеллеры у меня были слишком мягкие и некачественные. Купил я пропеллеры с маркировкой 5045, вот такие:


Как видите, они довольно прочно выглядят, что так и есть.
Купить пропеллеры 5045 можно у этого продавца на али: https://goo.gl/x6Fs93
Чуть не забыл, у пропеллеров также пишут (не все, конечно) угол наклона лопастей, в дюймах. Его считают так: расстояние, которое пройдет пропеллер за один проворот в твердом веществе.
Чем больше будет это число, тем меньше нужно будет двигателю энергии для поддержания дрона на одной высоте, но больше энергии для разгона, а чем они меньше, тем он будет маневреннее, но двигатели должны будут крутиться быстрее. В общем, второй вариант это для гоночных дронов.
Мое мнение, сначала учитесь летать на 3-х лопастных, ведь не зря производители ставят на готовые наборы именно такие пропеллеры, а уже когда научитесь, пробуйте 2-лопастные. Трешки по ощущениям стабильнее держат квадрокоптер.
Не скупитесь на покупку пропов, если вы новичок и собираете гоночный дрон, то будете 100% падать и ломать пропеллеры, да и потом тоже, когда будете опытными, поэтому купите сразу пакет, там будет штук 10-12, например вот такой набор 3-х лопастных пропеллеров.
Какие пропеллеры можно безопасно использовать на квадрокоптере
Речь пойдет не о том, безопасно ли их будет использовать для вас, а безопасно ли их использовать для ваших компонентов квадрокоптера. Есть два главных фактора:
- сколько тока может отдать аккумулятор,
- сколько тока могут непрерывно потреблять двигатели.
По аккумуляторам: неправильно подобранные пропеллеры, например, слишком большие или для мощных двигателей, в то время как у вас слабые, приведет к слишком большому потреблению тока, а это негативно будет сказывать на аккумуляторе. Это будет происходить таким образом: из-за большого потребления тока, аккумулятор начнет нагреваться, после чего (после сильного нагрева) произойдет расширение банок аккумулятора — а это повреждение структуры и выход из строя.
По двигателям: с двигателями примерно тоже самое, если они перегреются, клей, на который приклеены магниты и им же обработана обмотка — начнут плавиться, произойдет короткое замыкание и двигатель сгорит. Также, в моторах используются неодимовые магниты, которые не переносят высоких температур. Так, если двигатель нагреется до 80 С* и выше, магниты потеряют часть своего магнитного поля, после чего двигатель перестанет работать. Перегрев происходит в следствии длительной большой нагрузки, подачи больших токов, вибрации, неправильно подобранных пропеллеров.
Рекомендации по выбору пропеллеров
Можно выделить 3 группы по типу использования и назначения:
-
Традиционные и спокойные полеты — рекомендуем летать на трех-лопастных пропеллерах 5051, которые можно купить по этой ссылке, а выглядят они вот так:
-
Пропеллеры для гонок и агрессивных полетов — ставятся на двигатели 2300KV или меньше. Тоже трех-лопастные, но под номером 5040 (купить можно здесь), или 5045 (купить можно здесь). Выглядят они вот так:
-
Пропеллеры для агрессивных полетов — это двух-лопастные пропеллеры, которые ставят на моторы 2300KV и выше. Маркировка у них 5045 (купить здесь) и 5040 (купить здесь). Маркировка совпадает, но не совпадает количество лопастей, как вы наверное заметили





Также, советую прочитать статью о том, из чего собрать FPV квадрокоптер и что это такое.
Создана: декабрь 2017
Обновлено: май 2018
Используемые источники:
- https://drongeek.ru/profi/propellery-dlya-kvadrokoptera
- https://i-smotr.ru/vinty-dlya-kvadrokoptera-vsyo-chto-nuzhno-znat.html
- https://profpv.ru/propellery-dlya-kvadrokoptera/

 Как сделать квадрокоптер своими руками. Краткое руководство
Как сделать квадрокоптер своими руками. Краткое руководство Подбираем детали для дрона с камерой и собираем квадрокоптер
Подбираем детали для дрона с камерой и собираем квадрокоптер Как летает вертолет.
Как летает вертолет. Вентилятор без лопастей. Устройство и принцип работы. Сравнительные преимущества
Вентилятор без лопастей. Устройство и принцип работы. Сравнительные преимущества