Здравствуйте, наши уважаемые читатели. Начинающие пилоты зачастую имеют слабое представление о том, как управлять радиоуправляемым вертолетом. Ошибки в пилотировании приводят к падениям, столкновениям и иным неприятным для летательного аппарата последствиям. Действительно, управлять вертолетом сложнее по сравнению с радиоуправляемым квадрокоптером. Необходимо иметь хотя бы общие теоретические знания, чтобы отдавать правильные команды.
Подготовка к полету и настройка вертолета
Хотя большинство моделей вертолетов на радиоуправлении продаются в комплектации RTF (то есть в собранном виде), не торопитесь с запуском. Как минимум необходимо зарядить аккумулятор, соединиться с пультом и выполнить калибровку сервопривода, чтобы дальше управлять вертолетом без проблем. Совершенно нелишней окажется и корректировка рысканья.

Подключение пульта к радиоуправляемой модели вертолета выполняется в следующей последовательности:
- включаем пульт управления;
- вставляем аккумулятор в вертолет;
- соединяем оба устройства.
Калибровка сервопривода радиоуправляемого аппарата проводится следующим образом:
- Вертолет ставим на горизонтальную поверхность и соединяем его с аппаратурой управления.
- Обращаем внимание на диск сервопривода. Он должен быть параллелен поверхности.
- Если диск не параллелен, производим его корректировку триммером тангажа.
Корректировку рысканья, чтобы управлять моделями без проблем, следует проводить так:
- Радиоуправляемый вертолет ставим на горизонтальную поверхность и соединяем его с пультом управления.
- Скорость вращения несущего винта плавно увеличиваем с помощью стика управления скоростью до начала смещения модели, но не допускаем ее взлета.
- При вращении фюзеляжа по часовой стрелке вращаем регулятор триммера корректировки против часовой стрелки до тех пор, пока вертолет не перестанет поворачиваться.
- При вращении фюзеляжа против часовой стрелки регулятор триммера корректировки поворачиваем по часовой стрелке до тех пор, пока радиоуправляемый беспилотник не перестанет вращаться.
Нелишним будет освоить, как управлять газом, заодно потренировавшись в посадке летательного аппарата.
Для этого:
- берем модель за шасси, плавно прибавляем и уменьшаем газ. Так вы получите представление о возникающей подъемной силе;
- устанавливаем радиоуправляемый беспилотник на горизонтальную поверхность и плавно отклоняем стик, добавляя газ. Набираем высоту, после чего так же плавно приземляемся.
Освоиться, как управлять моделями вертолетов, помогут симуляторы. Они очень точно моделируют основные ситуации.
Основы управления вертолетом
Хотя речь идет о моделях на радиоуправлении, к ним применимы принципы управления настоящими вертолетами.

 Шпионский вертолет с камерой и пультом управления. НЕдетская игрушка.
Шпионский вертолет с камерой и пультом управления. НЕдетская игрушка.Мы рассмотрим основные понятия, как управлять радиоуправляемым вертолетом, расскажем, какие силы оказывают влияние на летательный аппарат и как они распределяются в разных режимах полета. Теория поможет вам быстрее освоить управление, вы поймете, почему модель ведет себя так, а не иначе.
Эффект земли
Так называемый эффект земли можно наблюдать при зависании вертолета над поверхностью на высоте, несколько меньшей диаметра основного ротора.

Создаваемая лопастями ротора скорость воздушного потока не способна достигнуть максимальных значений из-за небольшого расстояния радиоуправляемой модели до поверхности. Летательный аппарат оказывается над своеобразным пузырем, созданным воздухом высокого давления.
Настоящие вертолеты при возникновении эффекта земли теряют устойчивость, управлять ими сложно. Поведение аппарата можно сравнить с поведением человека, оказавшегося на большом шаре. Радиоуправляемые модели также могут испытывать проблемы с устойчивостью, находясь на небольшом удалении от поверхности, однако однозначного мнения на этот счет нет. Некоторые моделисты утверждают, что ничего подобного не наблюдали либо эффект был слабо выражен.
Большое значение имеет ветер. Если он сильный, то воздух высокого давления выдувается из-под радиоуправляемого вертолета, влияние эффекта заметно уменьшается, управлять моделью проще.
Подъем и снижение
При зависании вертолета над землей подъемная сила, развиваемая лопастями ротора, равняется весу летательного аппарата. Чтобы радиоуправляемый беспилотник поднялся выше, необходимо увеличить подъемную силу, то есть она должна стать больше веса. Для снижения ее нужно уменьшить.
Скорость подъема вертолета зависит от разницы между подъемной силой, развиваемой несущим винтом на максимальной мощности, и силой тяжести. Чем значительнее разница, тем быстрее поднимается летательный аппарат.
Для взлета рекомендуется выбирать горизонтальную поверхность. Почему управлять на ней аппаратом легче? Все дело в том, что при подъеме с наклонной поверхности диск вращения ротора также наклоняется, а подъемная сила разделяется на две составляющие: горизонтальную и вертикальную. Соответственно, горизонтальная составляющая силы будет перемещать радиоуправляемую модель в сторону наклона поверхности сразу после взлета.
Чтобы избежать дрейфа, следует находить для взлета ровную поверхность. Если же такой возможности нет, тогда управлять так: диск ротора наклонить в обратную углу наклона сторону, чтобы все-таки обеспечить вертикальный взлет. При этом ручку, чтобы управлять автоматом перекоса, следует перед отрывом переместить вправо, сразу после отрыва от земли вернуть в нейтральное положение.
 Пошаговый гайд для новичков: как управлять радиоуправляемым вертолетом?
Пошаговый гайд для новичков: как управлять радиоуправляемым вертолетом?Висение
При зависании модели на радиоуправлении в воздухе подъемная сила основного винта равна силе веса вертолета. Беспилотник не опускается и не поднимается, оставаясь в одной горизонтальной плоскости. Так как изменить в полете вес радиоуправляемой модели мы не в силах, нам остается управлять силой тяги (подъемной силой).
Управлять подъемной силой возможно через:
- изменение общего шага (угла установки лопастей);
- изменение количества оборотов.
Соответственно, есть две модели. В первой вариант, как управлять тягой, реализован через изменение угла установки лопастей. Это модель с общим шагом. Вторая модель с фиксированным шагом предполагает, что угол остается неизменным, а управлять тягой винта, изменяя ее, можно через регулирование количества оборотов.
Перемещение по горизонту и разворот
Разложив общий вектор подъемной силы несущего винта на составляющие, мы увидим, что он определяется суммой векторов тяги задней и передней лопасти. Оба этих вектора могут изменяться в зависимости от того, где находятся лопасти относительно продольной оси. Это дает возможность управлять вертолетом в горизонтальной плоскости.
Подъемная сила, образуемая задней частью диска вращения, оказывается выше, чем сила передней части. В результате нос опускается, тогда как хвостовая балка поднимается. Радиоуправляемая модель двигается вперед.
При движении вперед подъемная сила (вернее, ее вертикальная составляющая) по-прежнему равняется весу радиоуправляемого аппарата. Что касается горизонтальной составляющей, то ее увеличение или уменьшение определяет величину тягу в горизонтальном направлении.
Управлять направлением полета в горизонтальной плоскости можно с помощью ручки перекоса:
- Ее можно передвинуть вперед, аппарат перекоса наклонится вперед (нос опустится).
- Для выравнивания автомата нужно вернуть ручку в нейтральное положение.
- Наклонив ручку назад, вы наклоняете аппарат назад (нос поднимается).
Для того чтобы выполнить разворот, радиоуправляемую модель необходимо накренить.
Предположим, что мы хотим развернуть летательный аппарат вправо. Как управлять вертолетом в этом случае? Вектор силы веса по-прежнему остается перпендикулярным земле, тогда как вектор подъемной силы перпендикулярен диску вращения и наклонен вправо по отношению к горизонтальной поверхности на некий угол. В результате вертикальная составляющая вектора подъемной силы все также противодействует силе веса, а горизонтальная составляющая начинает толкать модель вправо, тем самым разворачивая ее.
Так как беспилотник выполняет поворот, будучи наклоненным в одну из сторон, значение вертикальной составляющей вектора силы уменьшается и становится меньше веса, зато появляется горизонтальная составляющая. При этом вес радиоуправляемого аппарата остается неизменным. Если все оставить, как есть, то при каждом повороте вертолет будет снижаться, что нас вряд ли устраивает, если мы хотим оставаться в одной горизонтальной плоскости.
 Выбираем радиоуправляемый вертолет на раз, два, три! 3 критерия выбора оптимальной модели
Выбираем радиоуправляемый вертолет на раз, два, три! 3 критерия выбора оптимальной моделиВ этом случае управлять следует так: необходимо увеличить подъемную силу с помощью ручки управления тангажем. Нужно переместить нос вверх, чтобы сделать больше угол атаки несущего винта.
Крен и боковое перемещение
Изменением подъемной силы разных сторон ротора можно управлять креном вертолета влево или вправо. Для совершения крена необходимо переместить ручку управления аппаратом перекоса влево или вправо. Радиоуправляемый аппарат начнет наклоняться, вместе с ним будет совершать крен и модель.
Гироскопическая прецессия
Ротор радиоуправляемого вертолета по своему поведению похож на гироскоп, это означает, что ему присуща гироскопическая прецессия.
Из-за этого явления лопасть с уменьшенным шагом и лопасть с возросшим шагом окажутся на минимальном и максимальном отклонении от горизонтальной плоскости, сделав поворот на 90 градусов.
Когда лопасть оказывается перпендикулярно продольной оси летательного аппарата над хвостовой балкой, она демонстрирует максимальный взмах и тягу. В этот момент устанавливается максимальный шаг, что позволяет успешно управлять моделью, то есть выполнить ее наклон вперед.
Подъемная сила при косом обтекании
При горизонтальном полете подъемная сила становится больше благодаря увеличению скорости воздушного потока и увеличению количества воздуха, проходящего через пропеллеры.
При перемещении радиоуправляемого беспилотника в горизонтальной плоскости возникает дополнительная подъемная сила при так называемом косом обтекании. И она зависит от горизонтальной скорости модели. Чем быстрее летит радиоуправляемый вертолет, тем существеннее сила. Ее легко распознать, так как происходит заметное улучшение летных характеристик.
Сила от перемещения возникает и при зависании на одном месте при условии, что дует ветер. Можно уменьшить мощность двигателя, тем самым сэкономив заряд батареи. Впрочем, если ветер порывистый, управлять летательным аппаратом сложно, так как приходится постоянно компенсировать то возрастающую, то уменьшающуюся силу. По этой причине управлять висением в воздухе лучше либо в полный штиль, либо при устойчивом ветре.
Авторотация
Под авторотацией понимается полет с остановленным двигателем. Вращение ротора вертолета происходит по инерции и благодаря действию воздуха, дополнительно раскручивающего лопасти при снижении радиоуправляемой модели.
При включенном двигателе воздушный поток оказывается нисходящим. Если же движок выключается в полете, снижение происходит с авторотацией, а воздушный поток становится восходящим.
Воздух переводит лопасти на отрицательный шаг, ротор продолжает вращение, вертолет может совершить управляемое снижение и приземлиться.
Не все радиоуправляемые модели обладают способностью к авторотации. Для этого в системе ротора должна быть установлена обгонная муфта, позволяющая лопастям свободно вращаться после остановки мотора. Возможность авторотации не является обязательной для летательных аппаратов. Однако в случаях, когда главный двигатель внезапно отказывает, ротор без авторотации останавливается, приземление происходит жестко, зачастую с повреждениями. Стремительная потеря высоты и быстрое снижение могут привести к печальным последствиям.
Рысканье
Под рысканием понимаются угловые движения радиоуправляемой модели относительно вертикальной оси. Упрощенно говоря, это повороты корпуса влево или вправо в горизонтальной плоскости.
Одной из причин того, почему для вертолетов на радиоуправлении рекомендуются специальные пульты, как раз и является возможность быстро управлять рысканьем, компенсируя его. Можно использовать и стандартную аппаратуру от радиоуправляемых квадрокоптеров или самолетов, однако вам придется вручную управлять скоростью вращения лопастей хвостового ротора, чтобы удерживать нос летательного аппарата прямо.
В обычных пультах такой возможности нет, поэтому каждый раз, когда вы будете поднимать или опускать вертолет, придется вручную управлять тягой. То есть увеличивать или уменьшать тягу хвостового ротора, чтобы компенсировать увеличение или уменьшение реактивного момента. Это не очень удобно, хотя и несмертельно. В пультах для радиоуправляемых вертолетов все гораздо удобнее, так как есть:
- ручка, чтобы управлять тангажом;
- ручка, чтобы управлять дросселем;
- кнопки для снижения и для подъема.
Как избежать аварий: частые проблемы
У начинающих пилотов первые запуски обычно завершаются или падением, или не самым мягким приземлением. Как правило, летательные аппараты успешно переживают жесткую посадку благодаря прочному корпусу и раме, однако у любой радиоуправляемой техники есть предел.
Очередная авария вполне может завершиться походом за запчастями или даже за новым радиоуправляемым вертолетом. Именно поэтому так важно научиться правильно им управлять.
Не взлетает
Вертолет радиоуправляемый может не взлетать по нескольким причинам.
В первую очередь проверьте аккумулятор. Если он разряжен, у двигателя не хватит мощности, чтобы поднять летательный аппарат в воздух. Большие радиоуправляемые модели в этом отношении особенно чувствительны, так как их двигателям нужно много энергии для взлета.
Еще одной причиной того, почему модель не может взлететь, а вы ей управлять, являются изношенные шестерни в системе привода. Внимательно осмотрите систему: если такие шестерни обнаружатся, замените их.
Крутится на месте
Бывает и так, что лопасти вращаются с необходимой скоростью, но радиоуправляемый вертолет не взлетает, крутится на одном месте, заносится в сторону.
Скорее всего, с двигателем и регуляторами хода все нормально, а причина в неисправности главного вала. Обычно вал получает повреждения в результате падения или столкновения, управлять аппаратом далее невозможно.
На этом пока все, не забывайте подписываться на наши статьи и делитесь полезными материалами в социальных сетях. До новых встреч.
Здравствуйте!
Взлет МИ-8 в зоне воздушной подушки.
Мы с Вами уже выяснили как, в принципе, управляется вертолет, и как работает автомат перекоса. А сегодня внесем некоторую ясность в вопрос о том, какую роль во всем этом играет пилот. Какие даны ему органы управления для решения вобщем-то непростой задачи, каковой является управление вертолетом
С самолетом все более-менее понятно. У него есть две самостоятельные системы: система управления самолетом (собственно управление рулями и элеронами) и система управления двигателем. И органы в кабине экипажа в количестве трех штук 🙂 : ручка управления самолетом (РУС), ручка управления двигателем (РУД), и педали для управления рулем направления. Как в этом плане обстоят дела у вертолета?…
Начнем с того, что определим более конкретно типы управления вертолетом.
Первое — это вертикальное управление. Осуществляется путем одновременного изменения угла установки лопастей несущего винта (то есть изменением общего шага). Делает это автомат перекоса.
Второе — путевое управление.То есть изменение направления полета. Осуществляется при помощи рулевого (хвостового) винта путем изменения его тяги (то есть изменение общего шага рулевого винта). Если вертолет двухвинтовой схемы (без хвостового винта), то путем изменения крутящего момента одного из винтов. Об этом я уже говорил ранее.
Третий тип — поперечное управление. Это управление вертолетомпо крену. Крен создается наклоном плоскости вращения винта (а значит и полной аэродинамической силы винта) в нужную сторону, вправо или влево. При этом появляется боковая составляющая полной аэродинамической силы, обеспечивающая возможность бокового движения вертолета. Кроме того сила тяги винта теперь уже не проходит через центр тяжести вертолета. Поэтому относительно него появляется момент, кренящий вертолет в нужную сторону. Все это тоже прерогатива автомата перекоса.
Ну и четвертый тип управления вертолетом — продольное управление. Это управление вертолетом по тангажу, при этом вертолет летит вперед или назад с соответствующей скоростью. Осуществляется путем наклона плоскости вращения несущего винта и, соответственно, вектора полной аэродинамической силы в продольном направлении, вперед или назад. При этом создается угол тангажа (вертолет опускает или поднимает нос) из-за создания момента наклоненной аэродинамической силы относительно центра тяжести вертолета. Плюс появляется горизонтальная составляющая этой силы, которая, собственно, и движет вертолет в нужном направлении. Главную роль здесь опять же играет автомат перекоса, меняющий циклический шаг винта.
Итак у вертолета есть три главных агрегата, которые определяют его движение. Двигатель, автомат перекоса и рулевой винт. И, собственно, управление вертолетом означает управление этими тремя агрегатами. Для этого существуют три системы: система управления автоматом перекоса (управление циклическим шагом несущего винта), система управления хвостовым винтом и система управления общим шагом винта во взаимодействии с управлением оборотами (мощностью) двигателя, или система «шаг-газ».
Что такое «шаг-газ». Дело в том, что угол установки лопастей несущего винта (общий шаг) и обороты двигателя связаны. Ведь если увеличить угол, то возрастет величина аэродинамических сил, действующих на лопасти. Увеличивается и подъемная сила, и сила сопротивления. Винт, как говорят, нагружается. Двигатель, находясь на определенном уровне мощности не может «обслужить» возросшую нагрузку и может начать терять обороты. Тяга винта, соответственно, может уменьшиться.
Чтобы этого не происходило, была придумана система шаг-газ, которая одновременно с увеличением угла установки лопастей подает команду в топливную автоматику на увеличение оборотов (то есть «увеличиваешь шаг – даешь газ» и наоборот), тем самым исключая падение мощности двигателя.
Теперь о том, что у нас в кабине. У пилота есть собственно две ручки управления вертолетом.
Первая – ручка управления циклическим шагом винта (или просто ручка управления вертолетом). Она самолетного типа, расположена перед креслом пилота, и с ее помощью осуществляется продольное и поперечное управление вертолетом. От нее через специальную систему тяг и качалок воздействие передается на тарелку автомата перекоса, которая, в свою очередь, определяет циклический угол установки лопастей.
Системы управления циклическим и общим шагом винта.
Кабина вертолета. Хорошо видны спаренные ручки управления и ручки шаг-газ.
Вторая – ручка управления общим шагом винта или, как ее еще называют «ручка шаг-газ». Эта ручка обычно расположена слева от кресла пилота и перемещается вертикально вверх-вниз. С ее помощью осуществляется вертикальное управление путем одновременного воздействия на автомат перекоса и систему изменения оборотов двигателя. Обычно обороты двигателя меняются на первой трети перемещения ручки, далее уже меняется только общий шаг винта.
Отдельно от шага винта мощность двигателя может меняться только в небольших пределах для необходимой корректировки. Для этого на ручке шаг-газ существует специальный корректор ( обычно что-то типа поворотного кольца).
На схеме под номерами: 1 — ручка управления циклическим шагом; 2 — ручка шаг-газ; 3 — автомат перекоса; 4 — агрегат системы управления двигателем.
Кроме ручек управления есть еще педали. С их помощью опять же через систему управления вертолетом летчик воздействует на рулевой винт с целью изменения общего шага его лопастей, меняя тем самым, его тягу и, соответственно, разворачивающий момент вертолета.
Система управления шагом рулевого винта.
Кабина вертолета. Хорошо видны ручка управления и правая педаль.
При использовании всех описанных органов управления вертолетом, этот аппарат превращается в маневренную машину с довольно широкими возможностями.
Основные режимы полета вертолета – это взлет, висение, разгон и набор высоты, маневрирование и далее снижение и посадка. Обычные, впрочем, режимы для любого летательного аппарата, за исключением, конечно, висения. Этот режим доступен еще только самолетам с вертикальным взлетом и посадкой (СВВП), не считая, конечно, всякой экзотики :-).
Чуть-чуть подробнее о режиме взлета. Существует два способа взлета. Первый – «по вертолетному». В этом случае вертолет взлетает вертикально с кратковременным зависанием на высоте 1,5-2 метров (контрольное висение), после чего производится разгон с набором высоты. Второй – «по самолетному». При этом вертолет разгоняется на земле, набирает скорость отрыва и взлетает с последующим набором высоты и скорости.
Способ взлета выбирается в зависимости от состояния самого аппарата и от внешних условий. Определяющим в этом плане является запас мощности двигателя, что вполне понятно :-). Этот запас, в свою очередь, зависит от массы вертолета (точнее взлетной массы) и от таких параметров состояния атмосферы, влияющих на параметры работы двигателя и несущего винта, как местное давление воздуха, температура и влажность (влияющие на плотность воздуха).
Взлет по вертолетному.
Кроме того на выбор способа взлета влияет размер и состояние поверхности площадки, на которой находится вертолет, наличие каких-либо препятствий по курсу взлета и обязательно направление и сила ветра у земли.
Чем выше барометрическая высота места взлета (ниже давление), чем выше температура и влажность воздуха, а также чем ниже скорость встречного ветра, тем ниже запас мощности двигателя, и тем ниже должна быть взлетная масса вертолета.
Взлет по вертолетному – это основной вид взлета для современных аппаратов. Он, однако, тоже может иметь различную конфигурацию. Дело в том, что при работе воздушного винта вблизи земли может появиться эффект воздушной подушки. Это явление, я думаю, известно практически каждому современному человеку.
Воздух, отбрасываемый несущим винтом вниз тормозится у земли и образует как бы поддерживающую аппарат подушку. Такое может происходить обычно на совсем малом расстоянии от земной поверхности. Считается, что для вертолета это явление можно принимать во внимание, если расстояние от земли до плоскости вращения винта равно радиусу винта (или меньше). В этом случае прирост подъемной силы составляет 10-15%.
Так вот взлет по вертолетному может осуществляться с разгоном вне зоны воздушной подушки или в ее зоне, а также может осуществляться разгон по наклонной траектории.
Первый случай выбирается тогда, когда взлетная площадка имеет ограниченные размеры и окружена высокими препятствиями, а также если она имеет сильное запыление или покрыта свежевыпавшим снегом. Режим работы двигателя при таком взлете – максимальный то есть запаса по мощности нет.
Это самый напряженный режим взлета, а при отказе двигателя (одного из двигателей) безопасная посадка не гарантирована. Вертикальный подъем должен осуществляться до высоты обеспечения прохода над препятствиями с превышением не менее 5 метров.
Взлет вне зоны воздушной подушки с площадки, ограниченной препятствиями.
Разгон по наклонной траектории может быть использован на такой же площадке, но с высотой препятствий до 5 метров. Запас мощности при таком взлете должен обеспечивать одновременный разгон с набором высоты. Должна быть гарантирована безопасная посадка в случае отказа двигателя (одного из двигателей).
Взлет с разгоном в зоне воздушной подушки – самый распространенный способ взлета. Он обычно производится с аэродромов (вертодромов), имеющих открытые подходы. При этом двигатель работает обычно на номинальном режиме, то есть имеется запас мощности для необходимого, в случае чего :-), маневрирования. Вертолет после контрольного висения разгоняется вдоль земли с углом тангажа на пикирование в 10-15 º (иной раз и больше, и это очень эффектно :-)) и далее переходит в набор высоты. Этот взлет, кстати, – самое распространенное из того, что мы видим в кино.
Если по вертолетному взлететь невозможно, то вертолет может взлететь по самолетному, вырулив для этого к месту старта. Далее все как у самолета :-). Ручка шаг-газ устанавливается на взлетный режим, ручка управления дается немного от себя (для появления горизонтальной тяги), вертолет разбегается и, набрав определенную скорость (порядка 40-50 км/ч), после небольшого взятия ручки управления на себя, отрывается от земли. Далее некоторое выдерживание на высоте около 1,5 метров и подъем.
Взлет по самолетному.
Вот так вкратце о возможностях взлета. О других рабочих (а также аварийных и специальных) режимах полета поговорим в следующих статьях и по пожеланиям трудящихся :-).
А пока всем, я думаю, понятно, что на любых режимах полета управление производится совместными перемещениями ручек управления вертолетом, шаг-газ и педалями. Управление вертолетом максимально приближено к самолетному, но отличия, конечно, на лицо. Пилотов вертолетов даже наблюдению из кабины за землей учат по-другому. Ничего не поделаешь, специфика. Да и сравнивать вертолет и самолет наверное было бы неправильно. Однако, как говорится глаз радует и тот и другой :-). Оба летают удивительно красиво. Что еще нужно ? 🙂 :-)…….
В конце статьи помещаю ролик, который уже есть в моей статье о турбовальном двигателе. Для сегодняшней статьи он подходит как нельзя лучше :-). Взлет с разгоном в зоне воздушной подушки. Правда не совсем типичный, а с применением еще одного элемента под названием шик, граничащий с воздушным хулиганством. Однако ведь до чего ж эффектно выглядит! :-). Летчик… Снимаю шляпу…
В довершении еще ролик « О том как летает вертолет». Последний, к сожалению, на английском языке. Но кое-какие полезные моменты с точки зрения управления в нем можно понять и так и они неплохо показаны. К сожалению более приемлемого материала в этот раз не нашел 🙁 …
До новых встреч…
Фотографии кликабельны.
No related posts.
2014-09-07
Разберем управление вертолетом с одним несущим винтом и с одним рулевым винтом. Летчик управляет вертолетом и двигателем в полете, воздействуя на несущие рулевой винты.
В кабине летчика имеются ручки, рычаги и педали, связанные тросами «ли жесткими тягами с соответствующими органами управления вертолета. Кроме того, кабина летчика снабжена приборным и пилотажно-навигационным оборудованием, с помощью которого летчик контролирует работу двигателя, а также скорость, высоту и направление полета вертолета.
Как известно, для управления самолетом изменяют величины, направление и точки приложения аэродинамических сил, возникающих на крыле и на рулях, а также изменяют величину силы тяги.
Чтобы самолет мог лететь с набором высоты, летчик увеличивает тягу двигателя и отклоняет ручку управления на себя, что вызывает отклонение руля высоты вверх. При этом на руле высоты создается сила, которая изменяет направление полета, самолет поднимает нос, что вызывает увеличение угла атаки крыла. Увеличение угла атаки крыла соответствует увеличению подъемной силы крыла, при увеличении силы тяги самолет набирает высоту.
Управление вертолетом видео
Чтобы создать крен, летчик отклоняет ручку управления самолетом в требуемую сторону, это ведет к отклонению элеронов крыла. Один элерон отклоняется вверх, а другой — вниз, в результате чего левая и правая половины крыла создают различной величины подъемные силы и самолет накреняется.
Если нужно повернуть самолет влево или вправо, то летчик отклоняет ножные педали в требуемую сторону, что влечет за собой отклонение руля направления.
Для изменения скорости полета летчик сектором газа изменяет количество оборотов двигателя, или, что-то же самое, изменяет величину тяги винта или реактивного двигателя.
Если на самолете имеется воздушный винт изменяемого в полете шага, то для изменения шага винта в кабине имеется рычаг управления шагом винта, который обычно связывается с рычагом газа, так как шаг винта и газ двигателя должны быть между собой согласованы.
Чтобы управление вертолетом сделать похожим на управление самолетом, в кабине вертолета также имеются ручка управления, ножные педали, рычаг управления общим шагом винта и рычаг газа; однако они связаны уже не с теми органами, что на самолете, так как на вертолете нет крыла, ни элеронов, ни руля направления.
Ручка управления вертолетом связана тросами и тягами с механизмами продольного и поперечного управления автомата-перекоса на несущем винте.
Ножные педали соединены тросами или тягами с механизмом изменения установочных углов лопастей рулевого винта.
Рычаг управления общим шагом несущего винта соединен с ползуном автомата-перекоса.
Рычаг газа соединен тягами с дроссельной заслонкой карбюратора двигателя.
Управление вертолетом видео
Обычно управление общим шагом несущего винта и газом двигателя объединяют на одном рычаге, который в этом случае называется рычагом «шаг-газ». Дело в том, что изменение шага несущего винта, т. е. одинаковое изменение установочного угла всех лопастей винта, неизбежно вызывает увеличение или уменьшение мощности, потребной для вращения винта с неизменным числом оборотов. Несоответствие между мощностью, развиваемой двигателем, и мощностью, потребной для вращения винта, может привести к падению числа оборотов винта или чрезмерной раскрутке его, что влечет за собой невозможность продолжения полета. Управление шагом винта и газом объединено на одном рычаге таким образом, чтобы мощность двигателя всегда была приближенно равна мощности, потребляемой винтом. Для окончательной регулировки их на рычаге «шаг-газ» предусматривается рукоятка коррекции газа двигателя, позволяющая производить в небольших пределах изменение мощности двигателя без изменения шага винта.
За счет чего же вертолет перемещается вперед, в стороны и назад?
Если спросить об этом у конструктора, то он ответит: «За счет циклического изменения шага лопастей по азимуту».
А если задать вопрос, что же такое «циклическое изменение по азимуту», то последует разъяснение: «Это — синусоидальное изменение углов атаки лопастей в зависимости от их азимутального положения».
Это правильно? Безусловно. А понятно? Не очень. Разберемся, что это значит.
Для того чтобы из положения висения перевести вертолет в горизонтальный полет вперед, назад или в сторону, необходима сила, направленная в эту сторону. А как получить такую силу, которую по желанию можно было бы не только изменять по величине, но изменять по направлению.
Можно, конечно, поставить под фюзеляж еще один двигатель с воздушным винтом, который бы поворачивал вертолет в любом направлении.
А можно сделать значительно проще: использовать силу, уже имевшуюся на висящем вертолете, а именно — аэродинамическую силу несущего винта, которая при висении проходит вдоль оси винта.
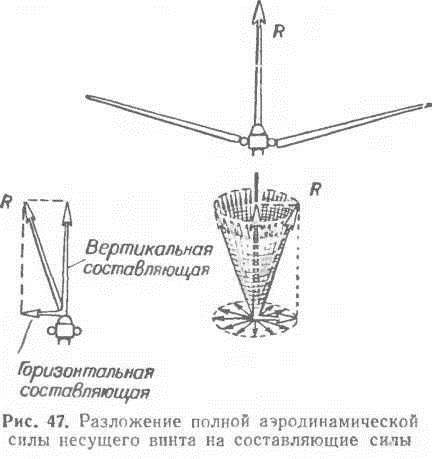
Если изменить положение этой силы (наклонить ее) по сравнению с ее исходным вертикальным положением, то ее можно разложить на две составляющие силы: вертикальную и горизонтальную.
Горизонтальная составляющая и будет той силой, которая перемещает вертолет в желаемом направлении, а вертикальная составляющая будет по-прежнему выполнять роль подъемной силы. В зависимости от того, в какую сторону наклонить аэродинамическую силу винта, в ту сторону и может совершаться движение вертолета. Чем больший наклон будет иметь аэродинамическая сила, тем больше будет ее горизонтальная составляющая и тем большую скорость сможет развить вертолет в заданном направлении.
Итак, искомая сила найдена. Остается только найти способ наклонять эту силу в требуемом направлении и на необходимую величину.
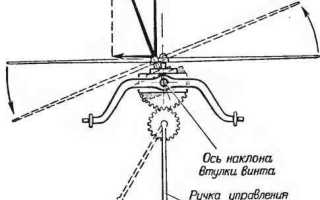
Казалось бы, простейшим способом изменять наклон аэродинамической силы винта является наклон самой оси несущего винта, а значит, и всей плоскости его вращения в требуемую сторону. Эта кажущаяся очень простой схема управления была впервые применена на автожирах. Она называется схемой непосредственного управления. Принцип непосредственного управления показан.
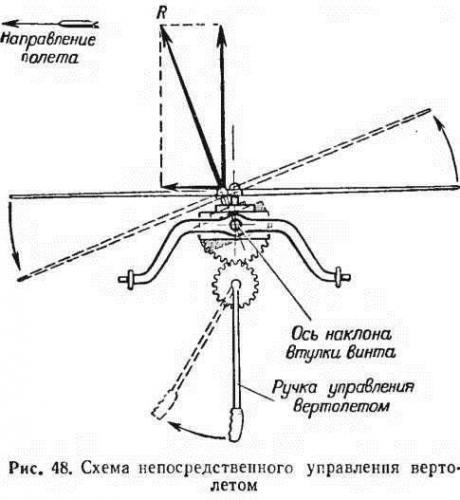
Передвинув ручку управления вертолетом вперед, летчик тем самым посредством пары зубчатых колес наклоняет вперед всю втулку крепления лопастей несущего винта, а вместе с тем и изменяет положение плоскости вращения несущего винта. При этом полная аэродинамическая сила его будет иметь горизонтальную составляющую, направленную вперед, и вертолет начнет движение в этом направлении. Таким образом, движению ручки управления вертолетом вперед будет соответствовать и движение вперед самого вертолета.
Однако изменять угол наклона плоскости вращения несущего винта на вертолете нелегкое дело, так как огромная плоскость вращения несущего винта является как бы ротором гироскопа, который стремится сохранить плоскость своего вращения. Кроме того, трудность представляет собой выполнение разрезного главного вала для обеспечения наклона втулки.
Изобретенный Б. Н. Юрьевым автомат-перекос, включенный в управление несущим винтом вертолета, лопасти которого имеют горизонтальные шарниры, позволяет достигать такого же эффекта, как и при наклоне плоскости вращения винта, но другим, более легким способом.
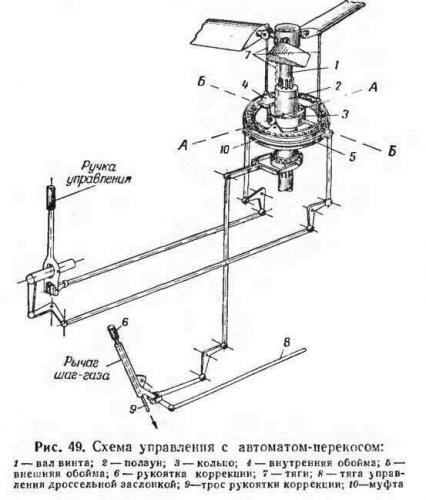
Принципиальная схема управления винтом с помощью автомата-перекоса изображена.
На валу винта имеется ползун. Ползун соединен с валом продольными шлицами, которые передают ползуну вращение вала. Кроме того, наличие продольных шлиц дает возможность перемещать ползун вдоль вала вниз и вверх, при этом внешняя обойма 5 перемещается в муфте.
С ползуном осью А—А связано кольцо, а с кольцом осью Б—Б связана внутренняя обоина автомата-перекоса. Таким образом, и кольцо, п внутренняя обойма тоже вращаются вместе с валом несущего винта. Кольцо может наклоняться вправо и влево, а внутренняя обойма, кроме наклона вправо и влево вместе с кольцом, может быть на оси Б—Б наклонена вперед и назад. Вследствие наличия шарикоподшипниковой связи наклоны внешней обоймы 5 вместе с муфтой будут вызывать наклоны внутренней обоймы, но внешняя обойма не будет вращаться, так как вращение вала винта через шарикоподшипник передаваться на нее не будет.
Управление вертолетом видео
Внешняя обойма тарели автомата-перекоса через муфту посредством тяг со сферическими наконечниками
п качалок связана с ручкой управления. Ползун связан с рычагом «шаг-газ».
На внутренней обойме автомата-перекоса имеются выступы. Число выступов соответствует числу лопастей винта. В данном случае их три. Тяги соединяют внутреннюю обойму с лопастями винта. Таким образом, наклон внешней и внутренней обоймы заставит все три лопасти изменить свои установочные углы вокруг осевых шарниров.
Если летчик отклонит ручку управления вертолетом вперед, то он тем самым заставит наклониться вперед (вокруг оси Б—Б) обе обоймы автомата-перекоса, а вместе с этим изменят свои установочные углы и все лопасти несущего винта. Теперь, когда обоймы наклонены вперед, во время вращения винта каждая лопасть, проходя над ручкой летчика (угол азимута 180), будет автоматически уменьшать свои установочный угол, а проходя над хвостовой балкой (угол азимута 0° или 360°), будет увеличивать свой установочный угол. Естественно, что при уменьшении установочного угла уменьшится и подъемная сила лопасти, в результате чего лопасть опустится. Там, где установочный угол увеличится, там увеличится и подъемная сила, и лопасть совершит взмах.
Таким образом, при отклонении ручки управления вертолетом вперед каждая лопасть, проходя над ручкой управления (угол азимута 180°), опустится, а проходя над хвостовой балкой, приподнимется. Это равносильно тому, что наклонился вперед конус лопастей. Поскольку можно считать, что полная аэродинамическая сила винта совпадает с осью конуса, т. е. перпендикулярна плоскости вращения концов лопастей, то наклон конуса вперед означает также, что вперед наклонилась, и линия действия силы, развиваемой винтом. А это значит, что появилась горизонтальная составляющая силы, обеспечивающая движение вертолета вперед.
Если при нейтральном положении ручки управления вертолет висел, то теперь, при отклонении ручки вперед, вертолет начнет движение вперед.
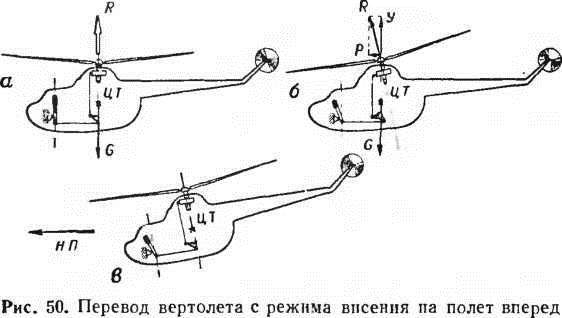
Если до отклонения ручки вперед полная аэродинамическая сила несущего винта R проходила через центр тяжести вертолета, то теперь она проходит сзади центра тяжести, в результате чего возникает момент относительно центра тяжести, заставляющий вертолет опускать нос. Опускание — это будет продолжаться до тех пор, пока линия действия силы R снова не совпадет с центром тяжести.
Итак, благодаря наклону автомата-перекоса лопасть не сохраняет постоянного установочного угла, а значит, и не сохраняет постоянного угла атаки. При угле азимута 0° (лопасть проходит над хвостовой балкой) угол атаки наибольший; -при движении от угла азимута 0 до 180° (лопасть направлена вперед) угол атаки уменьшается, а затем начинает увеличиваться и при угле азимута 360° снова доходит до максимального значения. А это и есть циклическое изменение углов атаки лопасти в зависимости от ее азимутального положения.
Так создается на современном вертолете наклон конуса лопастей и сила, двигающая вертолет в избранном направлении.
Для полета назад ручка управления вертолетом должна быть отклонена на себя, за нейтральное положение.
Полет вбок, например вправо, требует отклонить ручку управления вертолета вправо от нейтрального положения. Вследствие этого автомат-перекос увеличивает установочный угол лопастей, ометающих левую часть диска, за счет чего на этом участке увеличивается их подъемная сила и лопасти взмахивают, и, наоборот, уменьшает установочный угол лопастей, ометающих правую часть диска, где лопасти опускаются. Весь конус лопастей оказывается таким образом наклоненным вправо. Появляется горизонтальная составляющая сила винта, направленная вправо, которая и служит причиной перемещения вертолета в этом направлении.
Если при висении аэродинамическая сила винта проходила через центр тяжести, то теперь она проходит левее центра тяжести. Появившийся момент наклоняет фюзеляж вертолета вправо до тех пор, пока линия действия силы не совпадет с центром тяжести. Поэтому полет вправо сопровождается наклоном фюзеляжа вправо.
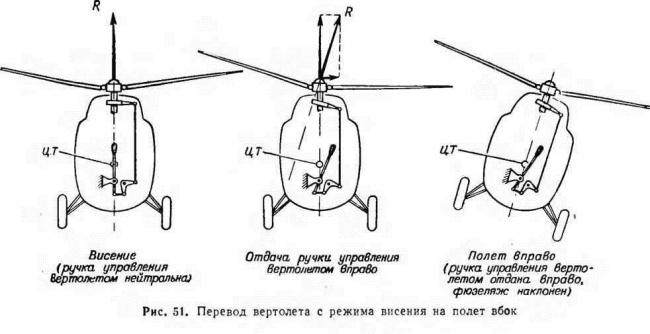
Следует, однако, заметить, что наклон аэродинамической силы несущего винта не повторяет в точности наклона автомата-перекоса. В самом деле, пусть автомат-перекос наклонен назад, конус несущего винта также будет наклонен назад. Однако в этом случае происходит нежелательное изменение углов атаки у наступающей и отступающей лопастей, так как наклон винта назад неизбежно меняет тот угол, с которым встречают поток лопасти, проходя навстречу потоку или уходя от потока. Угол атаки наступающей лопасти увеличится, а отстающей уменьшится. Это вносит изменение в маховое движение лопастей, благодаря чему образуется угол отставания аэродинамической силы винта от того направления, в котором отклонен автомат-перекос.
Желательно, однако, чтобы аэродинамическая сила несущего винта строго подчинялась движению ручки управления вертолетом. Для этого передача от ручки управления к автомату-перекосу выполняется таким образом, чтобы автомат-перекос отклонялся несколько иначе, чем ручка, но зато наклон аэродинамической силы строго соответствовал бы наклону ручки управления вертолетом.
Если отклонение ручки управления вертолетом изменяет наклон линии действия подъемной сипы, развиваемой несущим винтом, то рычаг «шаг-газ» служит для изменения величины этой силы.
Когда рычаг «шаг-газ» отклоняется назад на себя, то ползун скользит вверх по шлицам и заставляет все три лопасти увеличить установочный угол. В результате этого происходит увеличение подъемной силы каждой лопасти, а значит, и увеличение полной аэродинамической силы всего винта. Если рычаг «шаг-газ» отклоняется вперед от себя, то сила винта уменьшается.
Когда аэродинамическая сила ввита становится больше силы веса, то висящий вертолет отвесно набирает высоту. Когда аэродинамическая сила винта становится меньше силы веса, то вертолет совершает вертикальный спуск. Когда аэродинамическая сила винта равна силе веса, то вертолет висит на одной высоте.
Показано, насколько увеличивается потребная мощность для вращения несущего винта (среднего размера) в зависимости от увеличения установочного угла при постоянных оборотах 250 о6мин.
Схематически показано управление шагом рулевого винта.

Отклонение правой или левой педали через тросовое управление передается «а червячный механизм рулевого винта. Движение педалей заставляет вращаться червячную гайку. При этом червяк вывертывается или ввертывается. С червяком связаны тяги, идущие к рычагам лопастей. Движение червяка через рычаги передается на лопасти несущего винта, благодаря чему они поворачиваются в осевых шарнирах. При этом изменяется их общий установочный угол, а, следовательно, и тяга рулевого винта.
При висении вертолета или при прямолинейном полете тяга рулевого винта должна уравновешивать реактивный момент несущего винта.
Если вертолет необходимо повернуть вправо или влево, то движение педалей увеличивает или уменьшает шаг рулевого винта. В одном случае тяга становится больше, а в другом случае меньше той величины, которая необходима для уравновешивания реактивного момента несущего винта. Вертолет при этом разворачивается или под действием момента тяги рулевого винта, или под действием реактивного момента.
Отказ рулевого винта (например, из-за поломки хвостового вала трансмиссии) вызывает повороты вертолета под действием ничем не уравновешенного реактивного момента, например, на режиме висения вертолет делал бы несколько десятков оборотов в минуту вокруг вертикальной оси, что исключало бы возможность продолжения полета. Поэтому хвостовой вал, как и вся трансмиссия, изготовляется с большим запасом прочности.
При помощи органов управления на вертолете возможно совершать необходимые эволюции. Вертолет может летать с различными горизонтальными скоростями; он может как из горизонтального полета, так и с режима висения перейти на набор высоты или спуск, может крутиться на одном месте вокруг вертикальной оси, может быстро набирать скорость и быстро останавливаться, может совершать виражи и спирали. Вертолет остается полностью управляемым и в том случае, когда откажет двигатель. При этом самовращающийся несущий винт через трансмиссию передает вращение п на рулевой винт.
Для выполнения всех этих эволюций требуется координированное действие ручкой управления вертолетом, рычагом «шаг-газ» и ножными педалями.
Агрегаты техники
Далее .Используемые источники:
.Используемые источники:
- https://drongeek.ru/novichkam/kak-upravlyat-vertoletom
- http://avia-simply.ru/upravlenie-vertoletom/
- http://avia.pro/blog/upravlenie-vertoletom-video
 🇷🇺"Аллигатор" 🇺🇸"Апач" 🇨🇵🇩🇪"Тигр" и 🇨🇳"Z-19" Боевые ударные вертолеты Мира, какой же лучше!?
🇷🇺"Аллигатор" 🇺🇸"Апач" 🇨🇵🇩🇪"Тигр" и 🇨🇳"Z-19" Боевые ударные вертолеты Мира, какой же лучше!? Как летает вертолет.
Как летает вертолет. Радиоуправляемый вертолет Wltoys v911 pro Skywalker — лучшая игрушка для новичков
Радиоуправляемый вертолет Wltoys v911 pro Skywalker — лучшая игрушка для новичков Вертолет Mosquito XE, доработанный
Вертолет Mosquito XE, доработанный