Здравствуйте, наши уважаемые читатели. Начинающие пилоты зачастую имеют слабое представление о том, как управлять радиоуправляемым вертолетом. Ошибки в пилотировании приводят к падениям, столкновениям и иным неприятным для летательного аппарата последствиям. Действительно, управлять вертолетом сложнее по сравнению с радиоуправляемым квадрокоптером. Необходимо иметь хотя бы общие теоретические знания, чтобы отдавать правильные команды.
Подготовка к полету и настройка вертолета
Хотя большинство моделей вертолетов на радиоуправлении продаются в комплектации RTF (то есть в собранном виде), не торопитесь с запуском. Как минимум необходимо зарядить аккумулятор, соединиться с пультом и выполнить калибровку сервопривода, чтобы дальше управлять вертолетом без проблем. Совершенно нелишней окажется и корректировка рысканья.

Подключение пульта к радиоуправляемой модели вертолета выполняется в следующей последовательности:
- включаем пульт управления;
- вставляем аккумулятор в вертолет;
- соединяем оба устройства.
Калибровка сервопривода радиоуправляемого аппарата проводится следующим образом:
- Вертолет ставим на горизонтальную поверхность и соединяем его с аппаратурой управления.
- Обращаем внимание на диск сервопривода. Он должен быть параллелен поверхности.
- Если диск не параллелен, производим его корректировку триммером тангажа.
Корректировку рысканья, чтобы управлять моделями без проблем, следует проводить так:
- Радиоуправляемый вертолет ставим на горизонтальную поверхность и соединяем его с пультом управления.
- Скорость вращения несущего винта плавно увеличиваем с помощью стика управления скоростью до начала смещения модели, но не допускаем ее взлета.
- При вращении фюзеляжа по часовой стрелке вращаем регулятор триммера корректировки против часовой стрелки до тех пор, пока вертолет не перестанет поворачиваться.
- При вращении фюзеляжа против часовой стрелки регулятор триммера корректировки поворачиваем по часовой стрелке до тех пор, пока радиоуправляемый беспилотник не перестанет вращаться.
Нелишним будет освоить, как управлять газом, заодно потренировавшись в посадке летательного аппарата.
Для этого:
- берем модель за шасси, плавно прибавляем и уменьшаем газ. Так вы получите представление о возникающей подъемной силе;
- устанавливаем радиоуправляемый беспилотник на горизонтальную поверхность и плавно отклоняем стик, добавляя газ. Набираем высоту, после чего так же плавно приземляемся.
Освоиться, как управлять моделями вертолетов, помогут симуляторы. Они очень точно моделируют основные ситуации.
Основы управления вертолетом
Хотя речь идет о моделях на радиоуправлении, к ним применимы принципы управления настоящими вертолетами.

 Радиоуправляемый вертолет Wltoys v911 pro Skywalker — лучшая игрушка для новичков
Радиоуправляемый вертолет Wltoys v911 pro Skywalker — лучшая игрушка для новичковМы рассмотрим основные понятия, как управлять радиоуправляемым вертолетом, расскажем, какие силы оказывают влияние на летательный аппарат и как они распределяются в разных режимах полета. Теория поможет вам быстрее освоить управление, вы поймете, почему модель ведет себя так, а не иначе.
Эффект земли
Так называемый эффект земли можно наблюдать при зависании вертолета над поверхностью на высоте, несколько меньшей диаметра основного ротора.

Создаваемая лопастями ротора скорость воздушного потока не способна достигнуть максимальных значений из-за небольшого расстояния радиоуправляемой модели до поверхности. Летательный аппарат оказывается над своеобразным пузырем, созданным воздухом высокого давления.
Настоящие вертолеты при возникновении эффекта земли теряют устойчивость, управлять ими сложно. Поведение аппарата можно сравнить с поведением человека, оказавшегося на большом шаре. Радиоуправляемые модели также могут испытывать проблемы с устойчивостью, находясь на небольшом удалении от поверхности, однако однозначного мнения на этот счет нет. Некоторые моделисты утверждают, что ничего подобного не наблюдали либо эффект был слабо выражен.
Большое значение имеет ветер. Если он сильный, то воздух высокого давления выдувается из-под радиоуправляемого вертолета, влияние эффекта заметно уменьшается, управлять моделью проще.
Подъем и снижение
При зависании вертолета над землей подъемная сила, развиваемая лопастями ротора, равняется весу летательного аппарата. Чтобы радиоуправляемый беспилотник поднялся выше, необходимо увеличить подъемную силу, то есть она должна стать больше веса. Для снижения ее нужно уменьшить.
Скорость подъема вертолета зависит от разницы между подъемной силой, развиваемой несущим винтом на максимальной мощности, и силой тяжести. Чем значительнее разница, тем быстрее поднимается летательный аппарат.
Для взлета рекомендуется выбирать горизонтальную поверхность. Почему управлять на ней аппаратом легче? Все дело в том, что при подъеме с наклонной поверхности диск вращения ротора также наклоняется, а подъемная сила разделяется на две составляющие: горизонтальную и вертикальную. Соответственно, горизонтальная составляющая силы будет перемещать радиоуправляемую модель в сторону наклона поверхности сразу после взлета.
Чтобы избежать дрейфа, следует находить для взлета ровную поверхность. Если же такой возможности нет, тогда управлять так: диск ротора наклонить в обратную углу наклона сторону, чтобы все-таки обеспечить вертикальный взлет. При этом ручку, чтобы управлять автоматом перекоса, следует перед отрывом переместить вправо, сразу после отрыва от земли вернуть в нейтральное положение.
 MiniCamera Y2000 - "Самая маленькая в мире камера"
MiniCamera Y2000 - "Самая маленькая в мире камера"Висение
При зависании модели на радиоуправлении в воздухе подъемная сила основного винта равна силе веса вертолета. Беспилотник не опускается и не поднимается, оставаясь в одной горизонтальной плоскости. Так как изменить в полете вес радиоуправляемой модели мы не в силах, нам остается управлять силой тяги (подъемной силой).
Управлять подъемной силой возможно через:
- изменение общего шага (угла установки лопастей);
- изменение количества оборотов.
Соответственно, есть две модели. В первой вариант, как управлять тягой, реализован через изменение угла установки лопастей. Это модель с общим шагом. Вторая модель с фиксированным шагом предполагает, что угол остается неизменным, а управлять тягой винта, изменяя ее, можно через регулирование количества оборотов.
Перемещение по горизонту и разворот
Разложив общий вектор подъемной силы несущего винта на составляющие, мы увидим, что он определяется суммой векторов тяги задней и передней лопасти. Оба этих вектора могут изменяться в зависимости от того, где находятся лопасти относительно продольной оси. Это дает возможность управлять вертолетом в горизонтальной плоскости.
Подъемная сила, образуемая задней частью диска вращения, оказывается выше, чем сила передней части. В результате нос опускается, тогда как хвостовая балка поднимается. Радиоуправляемая модель двигается вперед.
При движении вперед подъемная сила (вернее, ее вертикальная составляющая) по-прежнему равняется весу радиоуправляемого аппарата. Что касается горизонтальной составляющей, то ее увеличение или уменьшение определяет величину тягу в горизонтальном направлении.
Управлять направлением полета в горизонтальной плоскости можно с помощью ручки перекоса:
- Ее можно передвинуть вперед, аппарат перекоса наклонится вперед (нос опустится).
- Для выравнивания автомата нужно вернуть ручку в нейтральное положение.
- Наклонив ручку назад, вы наклоняете аппарат назад (нос поднимается).
Для того чтобы выполнить разворот, радиоуправляемую модель необходимо накренить.
Предположим, что мы хотим развернуть летательный аппарат вправо. Как управлять вертолетом в этом случае? Вектор силы веса по-прежнему остается перпендикулярным земле, тогда как вектор подъемной силы перпендикулярен диску вращения и наклонен вправо по отношению к горизонтальной поверхности на некий угол. В результате вертикальная составляющая вектора подъемной силы все также противодействует силе веса, а горизонтальная составляющая начинает толкать модель вправо, тем самым разворачивая ее.
Так как беспилотник выполняет поворот, будучи наклоненным в одну из сторон, значение вертикальной составляющей вектора силы уменьшается и становится меньше веса, зато появляется горизонтальная составляющая. При этом вес радиоуправляемого аппарата остается неизменным. Если все оставить, как есть, то при каждом повороте вертолет будет снижаться, что нас вряд ли устраивает, если мы хотим оставаться в одной горизонтальной плоскости.
 Всё о терменвоксах: полный гайд для любопытных новичков
Всё о терменвоксах: полный гайд для любопытных новичковВ этом случае управлять следует так: необходимо увеличить подъемную силу с помощью ручки управления тангажем. Нужно переместить нос вверх, чтобы сделать больше угол атаки несущего винта.
Крен и боковое перемещение
Изменением подъемной силы разных сторон ротора можно управлять креном вертолета влево или вправо. Для совершения крена необходимо переместить ручку управления аппаратом перекоса влево или вправо. Радиоуправляемый аппарат начнет наклоняться, вместе с ним будет совершать крен и модель.
Гироскопическая прецессия
Ротор радиоуправляемого вертолета по своему поведению похож на гироскоп, это означает, что ему присуща гироскопическая прецессия.
Из-за этого явления лопасть с уменьшенным шагом и лопасть с возросшим шагом окажутся на минимальном и максимальном отклонении от горизонтальной плоскости, сделав поворот на 90 градусов.
Когда лопасть оказывается перпендикулярно продольной оси летательного аппарата над хвостовой балкой, она демонстрирует максимальный взмах и тягу. В этот момент устанавливается максимальный шаг, что позволяет успешно управлять моделью, то есть выполнить ее наклон вперед.
Подъемная сила при косом обтекании
При горизонтальном полете подъемная сила становится больше благодаря увеличению скорости воздушного потока и увеличению количества воздуха, проходящего через пропеллеры.
При перемещении радиоуправляемого беспилотника в горизонтальной плоскости возникает дополнительная подъемная сила при так называемом косом обтекании. И она зависит от горизонтальной скорости модели. Чем быстрее летит радиоуправляемый вертолет, тем существеннее сила. Ее легко распознать, так как происходит заметное улучшение летных характеристик.
Сила от перемещения возникает и при зависании на одном месте при условии, что дует ветер. Можно уменьшить мощность двигателя, тем самым сэкономив заряд батареи. Впрочем, если ветер порывистый, управлять летательным аппаратом сложно, так как приходится постоянно компенсировать то возрастающую, то уменьшающуюся силу. По этой причине управлять висением в воздухе лучше либо в полный штиль, либо при устойчивом ветре.
Авторотация
Под авторотацией понимается полет с остановленным двигателем. Вращение ротора вертолета происходит по инерции и благодаря действию воздуха, дополнительно раскручивающего лопасти при снижении радиоуправляемой модели.
При включенном двигателе воздушный поток оказывается нисходящим. Если же движок выключается в полете, снижение происходит с авторотацией, а воздушный поток становится восходящим.
Воздух переводит лопасти на отрицательный шаг, ротор продолжает вращение, вертолет может совершить управляемое снижение и приземлиться.
Не все радиоуправляемые модели обладают способностью к авторотации. Для этого в системе ротора должна быть установлена обгонная муфта, позволяющая лопастям свободно вращаться после остановки мотора. Возможность авторотации не является обязательной для летательных аппаратов. Однако в случаях, когда главный двигатель внезапно отказывает, ротор без авторотации останавливается, приземление происходит жестко, зачастую с повреждениями. Стремительная потеря высоты и быстрое снижение могут привести к печальным последствиям.
Рысканье
Под рысканием понимаются угловые движения радиоуправляемой модели относительно вертикальной оси. Упрощенно говоря, это повороты корпуса влево или вправо в горизонтальной плоскости.
Одной из причин того, почему для вертолетов на радиоуправлении рекомендуются специальные пульты, как раз и является возможность быстро управлять рысканьем, компенсируя его. Можно использовать и стандартную аппаратуру от радиоуправляемых квадрокоптеров или самолетов, однако вам придется вручную управлять скоростью вращения лопастей хвостового ротора, чтобы удерживать нос летательного аппарата прямо.
В обычных пультах такой возможности нет, поэтому каждый раз, когда вы будете поднимать или опускать вертолет, придется вручную управлять тягой. То есть увеличивать или уменьшать тягу хвостового ротора, чтобы компенсировать увеличение или уменьшение реактивного момента. Это не очень удобно, хотя и несмертельно. В пультах для радиоуправляемых вертолетов все гораздо удобнее, так как есть:
- ручка, чтобы управлять тангажом;
- ручка, чтобы управлять дросселем;
- кнопки для снижения и для подъема.
Как избежать аварий: частые проблемы
У начинающих пилотов первые запуски обычно завершаются или падением, или не самым мягким приземлением. Как правило, летательные аппараты успешно переживают жесткую посадку благодаря прочному корпусу и раме, однако у любой радиоуправляемой техники есть предел.
Очередная авария вполне может завершиться походом за запчастями или даже за новым радиоуправляемым вертолетом. Именно поэтому так важно научиться правильно им управлять.
Не взлетает
Вертолет радиоуправляемый может не взлетать по нескольким причинам.
В первую очередь проверьте аккумулятор. Если он разряжен, у двигателя не хватит мощности, чтобы поднять летательный аппарат в воздух. Большие радиоуправляемые модели в этом отношении особенно чувствительны, так как их двигателям нужно много энергии для взлета.
Еще одной причиной того, почему модель не может взлететь, а вы ей управлять, являются изношенные шестерни в системе привода. Внимательно осмотрите систему: если такие шестерни обнаружатся, замените их.
Крутится на месте
Бывает и так, что лопасти вращаются с необходимой скоростью, но радиоуправляемый вертолет не взлетает, крутится на одном месте, заносится в сторону.
Скорее всего, с двигателем и регуляторами хода все нормально, а причина в неисправности главного вала. Обычно вал получает повреждения в результате падения или столкновения, управлять аппаратом далее невозможно.
На этом пока все, не забывайте подписываться на наши статьи и делитесь полезными материалами в социальных сетях. До новых встреч.
Общая инструкция по эксплуатации радиоуправляемыми вертолетами
Установка батареек и зарядка
Установка батарей пульта ДУ.
Снимите защитную крышку с задней стороны вашего пульта ДУ. Установите 6-8 батареек (размера АА)/в комплектацию не входят/ Закройте защитную крышку.
В В В В В В В В В В В В В В Батарейки В В В В В В В В В Защитная крышка
На малые вертолеты:
Phantom 6010-2; FXLВ 331; FXL SWIFT-время зарядки 30мин., подзарядка вертолета осуществляется через шнур USB или с пульта управления и буквально через 15 минут он снова в строю. Время полета 8-10мин.Радиус действия 10 метров позволяет наслаждаться полетом внутри помещения.
Это самые прочные из маленьких трехканальных вертолётов с гироскопом (устройство с вращающимся ротором способным сохранять постоянное направление оси вращении)Эта модель изготовлена на фабрике в Китае по лицензии японской фирмы HIMOTO -лидера в разработке качественных вертолетов, а качество изготовления выше всяких похвал.Полностью управляемая модель летает вверх-вниз, влево — вправо и вперед-назад, также на пульте управления есть специальная кнопка ускорения, с помощью которой можно насладиться фигурами высшего пилотажа, конечно при определенных навыках.Идеальное управление вертолетом позволяет без труда управлять им даже новичку.В В В В В В В В АВ от пульта ДУ В В В В В В В В В В В В В ВВ через USB
На большие вертолеты:
FM0161049 XBM-12; FM0161068 XBM-16;368;68688 подзарядка от сети 220в, через блок питания на аккумулятор вертолета. Время зарядки 150мин., подзарядка около 60мин.
Время полета 10-15 мин, радиус действия и высота полета до 50м.
В этих вертолетах снимается передняя часть и подключается два разьема- аккумулятора и платы вертолета/которые преднамеренно отключены/
_____________________________________________________________________________
1.В Переведите переключатель питания в положение OFF (выключен)
Время зарядки 40-50 минут. Среднее время полета вертолета 12 минут
Управление вертолетом.
В 1.В Включите ваш пульт ДУ.
2.В Лампочка на пульте будет мигать. Сделайте движение левым В стиком вверх/вниз, лампочка станет нормальной, это значит что В вертолет готов к эксплуатации.В
ДВИЖЕНИЕ ЛЕВЫМ СТИКОМВ
Левый стик для управления полетом вверх/внизВ
Левый стик пульта ДУ (вверх/вниз) позволяет регулировать скорость V вращения лопастей вертолета, тем самым позволяя регулировать высоту полета.
Правый стик для управления вращением по оси
Удерживая вертолет ввоздухе. Передвигайте правый стик пульта ДУ, влево для вращения вертолета против часовой стрелки, или направо для вращения вертолета по часовой стрелке.
Вперед
Передвигая правый стик вверх, вертолет полетит вперед.
Назад
Примечание: если во время эксплуатации вертолет начал вращаться, используйте регулировочное колесо для стабилизации вертолетаВ
Если вертолет вращается во время полета, следуйте указаниям ниже для остановки вращения.
Крутить регулировочное колесо по часовой стрелке
Вертолет вращается против часовой стрелки.
Примечание: крутите колесо пока вращение вертолета не прекратится.В
Крутить регулировочное колесо против часовой стрелки.
Вертолет вращается по часовой стрелке
Примечание: крутите колесо пока вращение вертолета не прекратится.В
</span>Получить полный текстПожаловаться<center>Подпишитесь на рассылку:</center><center>
- Воздушный транспорт
- Гигиена и эпидемиология на транспорте. Воздушный транспорт
- Упрощенные модели влияния географических и социально-экономических факторов на доступность воздушного транспорта
- Развитие инновационной деятельности авиакомпаний России в сфере авиаперевозок
- Административный регламент Федерального агентства воздушного транспорта предоставления государственных услуг по аэронавигационному обслуживанию пользователей воздушного пространства Российской Федерации
- Жидкостно-газовые системы транспортных воздушных судов. Пособие для студентов 4 и 5 курсов
- Совершенствование пространственной организации авиационного транспорта России. Автореферат
- Экономика воздушного транспорта. Учебное пособие
- Эксплуатант воздушного судна
- Положение об эмблеме Федерального агентства воздушного транспорта
Проекты по теме:
<center> Поиск</center><center> Вики</center><center> Архив</center><center> Отчеты</center><center>Хобби</center><center>Радио</center><center>Технологии</center><center>Транспорт</center><center>Авиация</center>
- Цена: USD 14.76
Сие есть проплаченный обзор уже приевшегося всем вертолетика на IR-управлении. Почему проплаченный? Сам вертолет был любезно и абсолютно безвозмездно предоставлен сайтом www.ahappydeal.com взамен обзора о нем. Чем собственно сейчас и занимаюсь 🙂 Я очень рад, что в детстве у меня не было радиоуправляемых моделей вертолетов, катеров, машинок, иначе скорей всего инженером я так бы и не стал. А так единственная игрушка в виде сломанной железной дороги заставляла упорно штудировать специальную литературу, как-то: «Юный Техник», «Моделист-Конструктор», «Левша», «Радио» и тому подобное (кто помнит те незабываемые дни, когда целый месяц ждешь журнал «Юный Техник»; и вот он приходит; хватаешь его, мчишься на чердак, и там читаешь взахлеб, начиная с конца, где очередная радиосхема — тот меня поймет). Посте такого мозгового штурма на свет рождались различного рода ракеты на водяной тяге, четырехэтажные воздушные змеи, кордовые модели истребителей на резиновой тяге, машинки из пустой катушки ниток, диска, вырезанного из стеариновой свечки, спички и резинки для волос, и еще черт знает какие неведомые агрегаты. Поэтому приношу свои соболезнования современным тинейджерам, у которых есть интернет и WoW. Скорей всего, толкового инженера с Вас не выйдет 🙂 Ладно, не буду о грустном. В одно прекрасное утро неизвестный китайский товарищ (да продлит ему китайский Бог САО дни на земле 🙂 ) из сайта www.ahappydeal.com предложил бесплатно потестить какую-то недорогую штукакенцию взамен обзора о ней. Кто читал книгу Всеволода Нестайко «Необычайные приключения Робинзона Кукурузо», тот конечно помнит, что все вещи делятся на три типа – штука, штукенция, и штукакенция. Кто не читал – срочно исправляем упущенное. Вот поэтому мой ясный взгляд испытателя и потрошителя внутренностей сразу же остановился на управляемой модели вертолетика. Взамен этой самой штукакенции неизвестный господин потребовал написать отзыв о ней (штукакенции, то есть, тогда я еще не знал, что на этот раз буду развинчивать, но желания такое уже зарождалось). С чем я конечно немедленно согласился. Долго ли, коротко ли, а посылка уже лежала в моем почтовом отделении. Здоровенная такая коробка, я поначалу подумал, что не тот вертолетик прислали. Когда распечатал – успокоился:



 Идем дальше. Первым делом попытался запустить вертолет. После недолгих поисков на борту был обнаружен переключатель ОН-ОФФ. Включив борт, включив пульт, подождал 5-7 секунд, после чего нажал на «газ». Лопасти завертелись, уряяяяяя!!! Пульт. В руке сидит удобно, управление тоже особых сложностей не возникает. Коробка автомат, слева двухпозиционный джойстик– «газ/тормоз», справа четырехпозиционный «вперед/назад» и «влево/вправо», причем «влево/вправо» осуществляется поворотом вертолета вокруг оси лопастей. Все джойстики подпружинены, что чертовски удобно – достаточно бросить газ, и вертолетик уже не так резво врезается в стену, впрочем, об этом позднее. Посредине регулятор гироскопа, о нем тоже позже.
Идем дальше. Первым делом попытался запустить вертолет. После недолгих поисков на борту был обнаружен переключатель ОН-ОФФ. Включив борт, включив пульт, подождал 5-7 секунд, после чего нажал на «газ». Лопасти завертелись, уряяяяяя!!! Пульт. В руке сидит удобно, управление тоже особых сложностей не возникает. Коробка автомат, слева двухпозиционный джойстик– «газ/тормоз», справа четырехпозиционный «вперед/назад» и «влево/вправо», причем «влево/вправо» осуществляется поворотом вертолета вокруг оси лопастей. Все джойстики подпружинены, что чертовски удобно – достаточно бросить газ, и вертолетик уже не так резво врезается в стену, впрочем, об этом позднее. Посредине регулятор гироскопа, о нем тоже позже. При первой же попытке взлета меня ждало разочарование – оторвалась одна лопасть (почему-то лопнул винт) и улетела в противоположную от меня сторону. Пришлось позаимствовать винт с обшивки.
При первой же попытке взлета меня ждало разочарование – оторвалась одна лопасть (почему-то лопнул винт) и улетела в противоположную от меня сторону. Пришлось позаимствовать винт с обшивки. Несмотря на то, что пилот с меня посредственный, на первом заряде аккумулятора удалось полетать по комнате (ну как полетать, так, скорей попадать) минуты 3, и выполнить миссию посадки аккурат в горшок с любимой фиалкой жены. После того, как заряд аккумулятора приказал заряжать, вооружился отвертками, пинцетами и скальпелем и приступил к препарированию. Вертолет имеет стандартную соосную схему – два винта, вращающиеся в разные стороны на одной оси. Оба винта управляются своим двигателем. В хвостовом «отсеке» стоит третий двигатель с горизонтальными лопастями, предназначенный для движения вперед-назад. В наличии есть даже флай-бар (flybar), куда ж без него, призванный изменять угол наклона лопастей и тем самым выравнивать вертолет. Я читал в Гугле принцип, но так нифига и не понял – там сложное описании с формулами и пр. Оставим это специалистам. Начинаем разбирать. Печатная плата с компонентами. Большую микросхему так и не удалось определить – на ней полностью стерта маркировка. Логически можно предположить, что это какой-то небольшой микроконтроллер, ибо ему нужно обрабатывать команды с пульта управления, выдавать сигналы для 3 двигателей и дополнительно обрабатывать информацию с гироскопа. Да-да, вы не ослышались – на борту присутствует самый что ни на есть однокристальный гироскоп – небольшая вертикально стоящая платка. Кто бы мог подумать – и это все в модели дешевле 15 баксов!!!
Несмотря на то, что пилот с меня посредственный, на первом заряде аккумулятора удалось полетать по комнате (ну как полетать, так, скорей попадать) минуты 3, и выполнить миссию посадки аккурат в горшок с любимой фиалкой жены. После того, как заряд аккумулятора приказал заряжать, вооружился отвертками, пинцетами и скальпелем и приступил к препарированию. Вертолет имеет стандартную соосную схему – два винта, вращающиеся в разные стороны на одной оси. Оба винта управляются своим двигателем. В хвостовом «отсеке» стоит третий двигатель с горизонтальными лопастями, предназначенный для движения вперед-назад. В наличии есть даже флай-бар (flybar), куда ж без него, призванный изменять угол наклона лопастей и тем самым выравнивать вертолет. Я читал в Гугле принцип, но так нифига и не понял – там сложное описании с формулами и пр. Оставим это специалистам. Начинаем разбирать. Печатная плата с компонентами. Большую микросхему так и не удалось определить – на ней полностью стерта маркировка. Логически можно предположить, что это какой-то небольшой микроконтроллер, ибо ему нужно обрабатывать команды с пульта управления, выдавать сигналы для 3 двигателей и дополнительно обрабатывать информацию с гироскопа. Да-да, вы не ослышались – на борту присутствует самый что ни на есть однокристальный гироскоп – небольшая вертикально стоящая платка. Кто бы мог подумать – и это все в модели дешевле 15 баксов!!!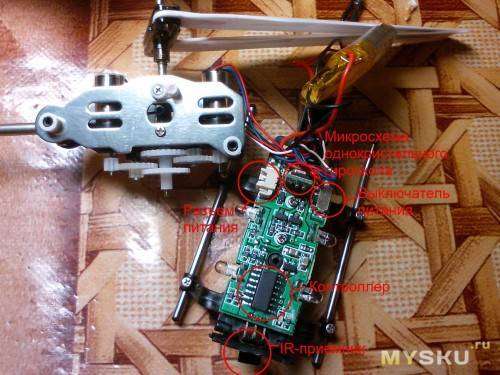

- https://drongeek.ru/novichkam/kak-upravlyat-vertoletom
- https://pandia.ru/text/79/541/11722.php
- https://mysku.ru/blog/others/10102.html

 Как управлять светом в квартире через iPhone или Android
Как управлять светом в квартире через iPhone или Android Обзор умного выключателя Sonoff T1, которым можно управлять прямо со смартфона
Обзор умного выключателя Sonoff T1, которым можно управлять прямо со смартфона Как погрузиться в VR. Большой гайд по шлемам виртуальной реальности
Как погрузиться в VR. Большой гайд по шлемам виртуальной реальности Прицел для rust
Прицел для rust