- Цена: $3
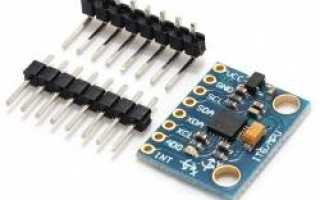
Датчики определения положения в пространстве широко используются в мобильных устройствах, а для самоделок чаще всего применяются в квадрокоптерах. Также, его можно применить в светящемся шлеме! Удобно, не правда ли? Наклонил голову вправо — загорелось правое «полушарие» =) влево — левое, согнул голову в шее — сзади на шлеме высветился стоп-сигнал! Вот только, думаю, моей шеи хватит минут на 5 таких упражнений, потом — коллдаун, в виде боли на неделю обеспечен. Итак, заказал — прислали, теперь нужно разобраться и продемонстрировать функционал для Вас, уважаемые читатели Муськи. Пришло с треком, не известно, почему, но в Киеве посылку держали неделю (или это глюки системы треккинга). Дошла чуть менее, чем за три недели. Упаковано в три слоя утеплителя — для амортизации. Сам модуль — внутри запаянного пакетика со штрих-кодом на наклейке: Размеры платы: 20×16мм. В комплекте два набора штыревых контактов: ровные и загнутые — удобно, не придется гнуть или ровнять.
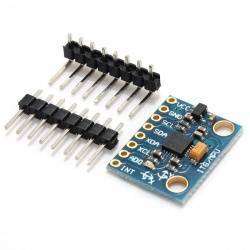
Размеры платы: 20×16мм. В комплекте два набора штыревых контактов: ровные и загнутые — удобно, не придется гнуть или ровнять.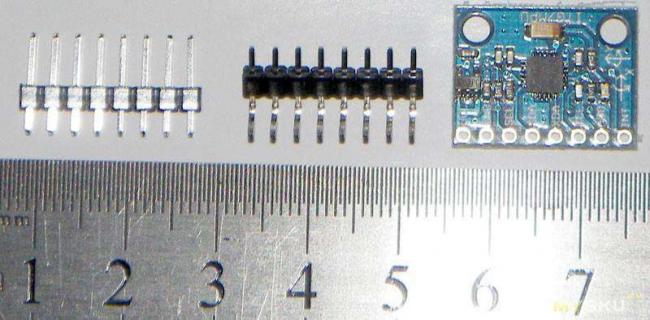 … Большие отверстия не металлизированы, как на картинке в магазине, поэтому, если Вы будите их прикручивать болтами к «минусу», эффекта не будет. Я заливаю их термоклеем, а он, образуя «шапочки», надёжно фиксирует плату. Отвертия контактов металлизированы отлично, паяются без проблем. Модуль GY-521 включает понижающий линейный стабилизатор для питания от 5В, красный светодиод питания и обвязку, обеспечивающую работу по протоколу I2C.СхемаВзята из статьи про такой же модуль — cxem.net/mc/mc324.php MPU-6050 снабжен акселерометром, гироскопом и термометром. Зачем нужен термометр — не понятно, вероятно, его было удобно разместить в этой микросхеме. Или, действительно, есть такие варианты применения, о которых я не знаю, где
… Большие отверстия не металлизированы, как на картинке в магазине, поэтому, если Вы будите их прикручивать болтами к «минусу», эффекта не будет. Я заливаю их термоклеем, а он, образуя «шапочки», надёжно фиксирует плату. Отвертия контактов металлизированы отлично, паяются без проблем. Модуль GY-521 включает понижающий линейный стабилизатор для питания от 5В, красный светодиод питания и обвязку, обеспечивающую работу по протоколу I2C.СхемаВзята из статьи про такой же модуль — cxem.net/mc/mc324.php MPU-6050 снабжен акселерометром, гироскопом и термометром. Зачем нужен термометр — не понятно, вероятно, его было удобно разместить в этой микросхеме. Или, действительно, есть такие варианты применения, о которых я не знаю, где тебя вертят и греют нужно вертеться в пространстве и знать температуру =) Или, в процессе интенсивной работы с устройством, оно может нагреваться и нужно контролировать его температуру и нагрузку.
Характеристики:
— 16-битный АЦП, — напряжение питания 3-5В, — поддержка протокола «IIC» (может, I2C ?), — диапазон ускорений: ± 2 ± 4 ± 8 ± 16g, — диапазон «гиро»: ± 250 500 1000 2000 ° / s, — покрытие иммерсионным золотом вместо лужения, — ток при работе последнего примера составил 5.3 мА и 1.2 мА когда устройство не успело стартовать (питание на модуль было подано после выполнения setup() контроллером)
Подключение к Arduino
Для интерфейса I2C у Ардуино имеются контакты A4 (SDA) и A5 (SCL), да-а, это те, которые расположены чёрти-где (на одной плате у меня они были справа от контроллера, на другой с левого края). В коде нужно использовать библиотеку Wire, прочитать о ней можно туточки. Минимальная схема во Fritzing такая:… а значит у нас уже не 8 лишних штырьков, а целых двенадцать!
Тестирование
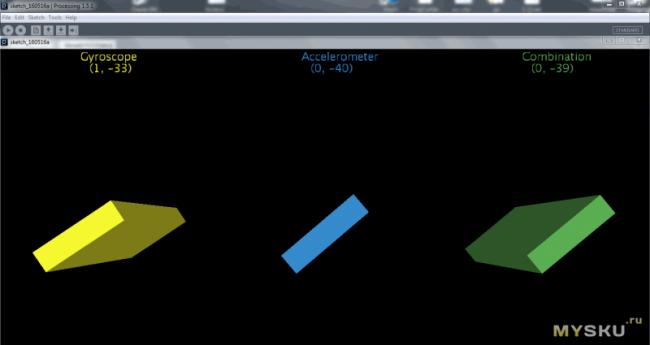
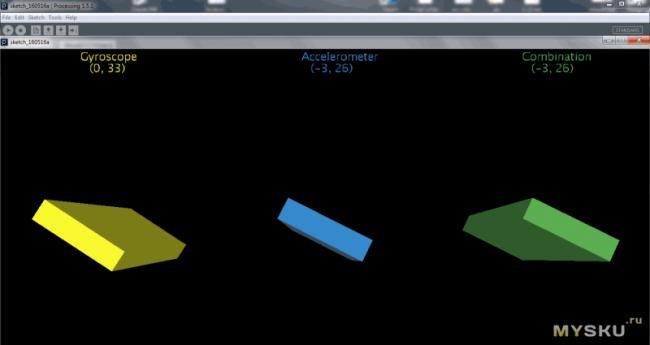
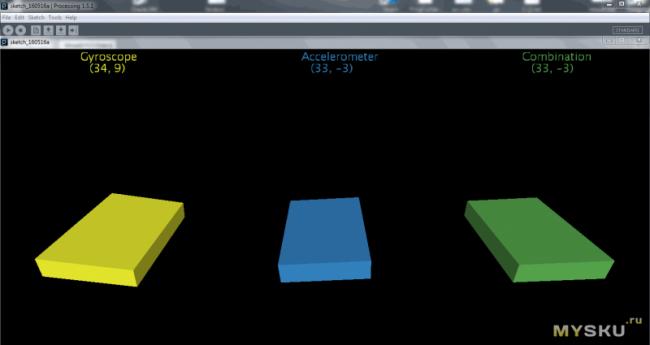
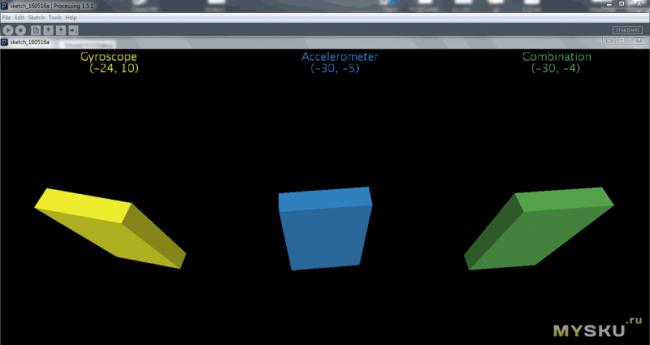
Термометр тестировать проще всего: залил скетч отсюда, открыл монитор порта, выставил скорость на 9600, — побежали такие строкиВследствие нагревания феном для волос, значение Tmp = взлетело до 80. Далее покрутили в пространстве платкой — другие показания тоже изменяются, но это не наглядно. Данные, выводимые вторым скетчем Более приятный глазу пример описан в этой статье. Там реализована трансляция положения предмета в реальном времени! Для повторения эксперимента, нужно скачать по ссылкам в конце той статьи: скетч для Ардуино — GY_521_send_serial (в atmega128 у меня залилось без проблем) и прогу для 3D-рендеринга ShowGY521Data. Последнюю нужно запускать в IDE Processing, статья была написана в 2013 году и для нормальной работы, качать лучше версию 1.5.1, в исходнике нужно подправить номер порта:short portIndex = 1; в строке 15 вместо 1 поставить порядковый номер COM-порта, но не номер из его имени (у меня, при подключении программатора, появляется один порт «COM15», я исправил на , если у Вас, допустим, есть порты «COM8» и «COM10», причем, последний соединён с Ардуино, то ничего исправлять не надо);myPort = new Serial(this, portName, 38400); в строке 42 поставить скорость, которая была в скетче для Ардуино — 19200. Запускаем программу…видим три объекта, моделирующих гироскоп, акселерометр и нечто «средне».При отклонении платы, объекты синхронно пляшут, акселерометр подёргивается реще
Тестовая установка
Тентаклиевый монстр, о котором я писал ранее, был пересмотрен, урезан и сокращён (кстати, на этом фото заметно отличие в качестве металлизации отверстий обозреваемой платы и дешевой платы Ардуино):если отсоединить тентакли шлейф от креплений, то откроются два ряда контактов, у которых нужно «поотламывать половинки», — в результате получится разъем, удобно вставляющийся в отверстия макетной платы. Для пущей надёжности, нужно проклеить корпус, т.к. держаться на одних контактах конструкция не будет.всё ещё может напугать, но на самом деле бояться нечего:спаял с обратной стороны контакты, прозвонил их тестером — и можно подключать. Лично моя практика показывает, что лучше потратить пару секунд на предварительную проверку, чем ткнуть «не туда» и спалить девайс… Я так спалил Orange Pi PC =)猫Даташит на сенсор MPU-6050Описание регистров MPU-6050Неплохая статья Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Акселерометр — это прибор, позволяющий измерять ускорение тела под действием внешних сил. Подробно об устройстве этого датчика мы уже рассказывали на одном из уроков: Акселерометр: что это такое и как им определять наклон тела
На этот раз мы перейдем от теории к практике: подключим датчик к Ардуино, и напишем пару программ для работы с ним. Подключать будем модуль MPU6050 от RobotClass.
В основе этого модуля лежит микросхема MPU6050, в которой размещаются сразу два датчика: акселерометр и гироскоп. На плате уже имеется вся необходимая обвязка, а также преобразователь напряжения.
Характеристики модуля MPU6050 ROC:
- напряжение питания: от 3,5 до 6 В;
- потребляемый ток: 500 мкА;
- ток в режиме пониженного потребления: 10 мкА при 1,25 Гц, 20 мкА при 5 Гц, 60 мкА при 20 Гц, 110 мкА при 40 Гц;
- диапазон: ± 2, 4, 8, 16g;
- разрядность АЦП: 16;
- интерфейс: I2C (до 400 кГц).
На плате имеется 8 контактов:
- VCC — положительный контакт питания;
- GND — земля;
- SDA — линия данных I2C;
- SCL — линия синхроимпульсов I2C;
- INT — настраиваемое прерывание;
- AD0 — I2C адрес; по-умолчанию AD0 подтянут к земле, поэтому адрес устройства — 0x68; если соединить AD0 к контактом питания, то адрес изменится на 0x69;
- XCL, XDA — дополнительный I2C интерфейс для подключения внешнего магнитометра.
Подключение MPU6050 к Ардуино
Соединим контакты датчика с Ардуино Уно согласно стандартной схеме для интерфейса I2C:
 Подключаем гироскоп-акселерометр (MPU-6050) к плате Arduino
Подключаем гироскоп-акселерометр (MPU-6050) к плате Arduino| MPU6050 ROC | GND | VCC | SDA | SCL |
| Ардуино Уно | GND | +5V | A4 | A5 |
Принципиальная схема
Внешний вид макета
Программа для получения сырых данных с акселерометра MPU6050
Составим программу, которая будет каждые 20 миллисекунд получать данные из MPU6050 и выводить их в последовательный порт.
#include "I2Cdev.h" #include "MPU6050.h" #define T_OUT 20 MPU6050 accel; unsigned long int t_next; void setup() { Serial.begin(9600); accel.initialize(); Serial.println(accel.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); } void loop() { long int t = millis(); if( t_next < t ){ int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw; t_next = t + T_OUT; accel.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw); Serial.println(ay_raw); // вывод в порт проекции ускорения на ось Y } }Для работы программы потребуются библиотеки: MPU6050 и I2Cdev, ссылки на которые можно найти в конце урока.
Загружаем программу на Ардуино и открываем окно графика. Поворачиваем датчик вокруг оси X на 90 градусов в одну сторону, потом на 90 в другую. Получится примерно такая картина.
На графике хорошо видно, что при наклоне оси Y вертикально, акселерометр выдает значения близкие к четырём тысячам. Откуда берется это число?
Точность измерения ускорения в MPU6050
Дело в том, что датчик MPU6050 позволяет настраивать точность измерений. Можно выбрать один из четырех классов точности: ±2G, 4G, 8G и 16G, где 1G — это одна земная гравитация. Используемая нами библиотека по-умолчанию настраивает датчик на диапазон ±8G (прим. по ссылке внизу статьи библиотека по-умолчанию устанавливает ±2G).
С другой стороны, MPU6050 имеет 16 разрядный АЦП. 2 в степени 16 даст нам число 65 536. Поскольку датчик может измерять и отрицательное и положительное ускорение, то он будет выдавать нам числа от -32768 до +32768.
Сложив эти два факта вместе получаем, что при таких настройках 1G будет равен числу 4096 (ну а -1G равен числу -4096). Это вполне совпадает с наблюдаемыми на графике значениями!
Следующий шаг — преобразование этих странных чисел в привычные нам углы, измеряемые в градусах.
Программа для вычисления угла наклона акселерометра MPU6050
Добавим в предыдущую программу вычисление угла поворота датчика вокруг оси X:
 Что такое Ардуино? Это свобода для изобретателя
Что такое Ардуино? Это свобода для изобретателя#include "I2Cdev.h" #include "MPU6050.h" #define TO_DEG 57.29577951308232087679815481410517033f #define T_OUT 20 MPU6050 accel; float angle_ax; long int t_next; float clamp(float v, float minv, float maxv){ if( v>maxv ) return maxv; else if( v= 0){ angle_ax = 90 - TO_DEG*acos(ay); } else { angle_ax = TO_DEG*acos(-ay) - 90; } Serial.println(angle_ax); // вывод в порт угла поворота вокруг оси X } }Загружаем программу в Ардуино и снова пробуем вращать датчик. Теперь на графике отображается угол наклона в градусах!
Ну вот, мы получили уже что-то пригодное для дальнейшего использования. Видно, что датчик поворачивался сначала на 30 с лишним градусов в одну сторону, потом примерно на 60 в другую. Работает!
Заключение
На этом уроке мы получили с датчика MPU6050 сначала сырые данные, а потом и угол его наклона в градусах. Это большое достижение. Но впереди еще немного математики и еще более крутые результаты! Будем делать комплементарный фильтр, который позволит работать с датчиком даже в условиях вибрации и тряски.
Несколько идей/заданий:
- Детектор стука, он же детектор попадания пули в мишень. Программа должна обнаружить всплеск показаний датчика по одной из осей и сигнализировать об этом, например, с помощью зуммера.
- Кодовый замок, открывающийся по определенной последовательности стука. То же, что и в предыдущем задании, только нужно считать паузы между стуками и сверять их с эталонной последовательностью.
- Детектор свободного падения. Если значения акселерометра по всем трем осям близки к нулю, значит тело находится в состоянии свободного падения.
- Пульт управления роботом. Можно прикрепить датчик на перчатку и отслеживать наклоны ладони по двум осям. Передавать значения датчика через Bluetooth роботу.
Принципиальная схема датчика
Полезные ссылки
2+
Ардуино – популярнейшая система для одноимённых МК, позволяющая любому желающему, даже без специального образования, воплотить в жизнь проект, о котором он давно мечтал. Будь то автоматизированная теплица или простая система выключения света по хлопку в умном доме.
Но естественно, сам микроконтроллер не способен выполнять все функции, и для этого к нему необходимо покупать датчики, коих на рынке более нескольких десятков разновидностей. Об одном из таких, а именно мы рассмотрим гироскоп Ардуино, и пойдёт речь. Что это такое, в каких проектах его можно применить и как настроить опишем ниже.
А если вам хочется больше практики — посмотрите наши уроки: Подключаем гироскоп-акселерометр (MPU-6050) к плате Arduino или Гироскоп с помощью Arduino 101.
Назначение связки гироскоп и акселерометр
Для начала давайте разберёмся, зачем Arduino mpu 6050 (Gy-521) вообще нужен и что собой представляет гироскоп-акселерометр в целом. Такой датчик все мы видели в смартфонах, и там он выполняет следующие функции:
- Позволяет замерять шаги. Акселерометр способен отслеживать резкие движения устройства, а в зависимости от его настройки и чувствительности, считать некоторые из них за шаг.
- Измеряет поворот экрана. Здесь уже оба устройства работают в паре. Ведь когда вы поворачиваете смартфон набок, картинка должна изменить свою ориентацию для пользователя, и лишь с помощью гироскопа удаётся определить угол наклона, под которым ПО это должно будет сделать.
- Компас, карты и навигация. Акселерометр с гироскопом позволяют определить ориентацию устройства в пространстве, что необходимо в различных приложениях для мобильной навигации.
Вот и выходит, что данный датчик подойдёт для тех проектов, в которых вам необходимо измерить ориентацию или движения прибора в пространстве, без точных данных о его местоположении. Это может быть, как самодельная линейка со встроенным уровнем, чтобы пользователь мог определить, насколько ровно стоит та или иная мебель, так и устройство для кровати, встроенной в стену, включающее свет, когда она выдвигается.
 ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИНо применить модуль можно и с большей выдумкой, например, для измерения количества оборотов в секунду и регуляции мощности охладительной системы или автоматизации различных процессов.
Всё зависит исключительно от вашей выдумки и конкретного проекта.
Смотрите по теме: Подключаем гироскоп-акселерометр (MPU-6050) к плате Arduino
Чаще всего гироскоп для Ардуино применяется в системах автоматизации под так называемые «смартхаусы» (умные дома — прим. ред.), являясь своеобразным переключателем. Передавая определённые данные в МК, который затем отправляет их по блютуз-модулю к другому устройству, он может управлять всей техникой в доме.
Ещё один простой способ применения – использование вместо датчика движения на дверях, для включения света и кондиционирования, когда вы возвращаетесь домой.
Комплектующие
Создаётся данный датчик или МК, в зависимости от того, что вы собрались приобретать, из компонентов ATmega328.
Так, в нём имеются:
- 14 штук различных пинов и цифровых выходов, половина из которых являются ШИМ-выходами.
- Специальные кварцевые резонаторы до 16 МГц мощностью.
- Встроенный вход под usb-кабель, который позволит вам сэкономить не только время, но и деньги, которые вы могли бы потратить на покупку адаптера.
- Контакты и распиновка для стандартного питания с нулем, фазой и заземлением.
- Контакты для сброса до заводских настроек, при которых весь машинный код и данные будут стёрты. Это полезно в том случае, если вы напортачили с программой и модуль превратился в бесполезную груду железа, и просто как экономия времени, если необходимо сменить прошивку.
- ICSP контакт, который необходим для того, чтобы запрограммировать машинный код, который будет находиться внутри системы.
Все эти компоненты и составляют Arduino гироскоп, позволяя ему выполнять свои базовые функции. Но как же запрограммировать систему, если вы до этого не имели опыта работа с данными МК?
Сборка
Здесь всё зависит от используемого вами интерфейса, например, для I2C от Ардуино пригодятся контакты: A4, A5, которые являются SDA и SCL входами соответственно.
Для нормального функционирования всей этой системы необходимо будет использовать wire библиотеку в коде.
| Gy-521 (mpu6050) | Arduino (Uno) |
|---|---|
| VCC | 3.3 V |
| GND | GND |
| SCL | A5 |
| SDA | A4 |
Также будьте готовы к тому, что распиновка может оказаться не самой удачной, поэтому не стоит делать корпус для устройства впритык, пока вы не подключите и не увидите реальные размеры вашего проекта.
Питание модуля строго 3.3В!
Программы
Без программы модуль будет не более чем грудой железа, которая не выполнит ни одной функции. Базовые библиотеки для взаимодействия с другими МК можно найти на официальном сайте или в интернете, но, помимо них, вам потребуется вспомогательный код. С его помощью можно настроить взаимодействие между акселерометром и тем же блютуз модулем, без которого, в большинстве проектов, он станет бесполезен.
Мы воспользуемся готовой библиотекой для Arduino MPU 6050, которую написал Джефф Роуберг.
Скачать библиотеку MPU6050
В целом, многие поступают и другим путем, правда далеко не все умеют программировать на С++, поэтому перед пользователем, который хочет написать программу для работы с гироскопом, открывается два пути:
- Найти уже готовый шаблон или библиотеку. Для этого потребуется всего пара секунд и подключение к интернету, но не стоит забывать, что готовые решения пишутся, зачастую, столь же неопытными инженерами. Поэтому, по возможности, проверяйте, насколько качественный код вы скачиваете. Смотрите отзывы о библиотеке, если есть такая возможность, и старайтесь скачивать их на зарубежных форумах. Там и выбор будет больше, и куда выше вероятность найти действительно качественную библиотеку.
- Написать функции и методы для работы системы своими силами. Этот вариант подойдёт лишь тем, кто ранее имел дело с языком С++ и понимает все нюансы работы с Ардуино. Все необходимые вспомогательные библиотеки можно скачать в интернете, а всё остальное вы можете подогнать под свои нужды. Такой способ идеально подходит для тех, кто хочет реализовать собственный проект, не имеющий аналогов. Ведь в таком случае найти заготовленный код под него будет крайне сложно, даже если быть готовым править большую его часть.
Вернемся к нашей библиотеке. После того как вы скачали библиотеку гироскопа вам нужно сделать следующее.
Нужно распаковать/извлечь эту библиотеку, взять папку с именем «MPU6050» и поместить ее в папку «library» в Arduino. Для этого перейдите в место, где вы установили Arduino (Arduino -> libraries) и вставьте свою папку в папку библиотек. Возможно, вам также придется сделать то же самое, чтобы установить библиотеку I2Cdev, если у вас еще нет ее на вашем Ардуино. Для её установки выполните ту же процедуру, что и выше. Вы можете скачать I2Cdev на нашем сайте по этой ссылке.
Если вы всё сделали правильно, при открытии IDE Arduino вы можете увидеть «MPU6050» в:
Файл -> Примеры.
Затем откройте пример программы из меню:
Файл -> Примеры -> MPU6050 -> Примеры -> MPU6050_DMP6.
Затем вы должны загрузить этот код в свой Ардуино. После загрузки кода откройте последовательный монитор и установите скорость передачи в бодах как 115200. Затем проверьте, видите ли вы что-то вроде «Инициализация устройств I2C …» («Initializing I2C devices …») на последовательном мониторе.
Если вы этого не сделаете, просто нажмите кнопку сброса. Теперь вы увидите строку с надписью «Отправить символы, чтобы начать программирование и демо DMP» («Send any character to begin DMP programming and demo»). Просто введите любой символ на последовательном мониторе и отправьте его, и вы должны начать видеть значения поступающие с MPU 6050.
Также можно, например, воспользоваться скетчем ниже, который пересчитывает координату X и Y и выводит в консоль (монитор последовательного порта):
#include #include "Kalman.h" Kalman kalmanX; Kalman kalmanY; uint8_t IMUAddress = 0x68; /* IMU Data */ int16_t accX; int16_t accY; int16_t accZ; int16_t tempRaw; int16_t gyroX; int16_t gyroY; int16_t gyroZ; double accXangle; // Angle calculate using the accelerometer double accYangle; double temp; double gyroXangle = 180; // Angle calculate using the gyro double gyroYangle = 180; double compAngleX = 180; // Calculate the angle using a Kalman filter double compAngleY = 180; double kalAngleX; // Calculate the angle using a Kalman filter double kalAngleY; uint32_t timer; void setup() { Wire.begin(); Serial.begin(9600); i2cWrite(0x6B,0x00); // Disable sleep mode kalmanX.setAngle(180); // Set starting angle kalmanY.setAngle(180); timer = micros(); } void loop() { /* Update all the values */ uint8_t* data = i2cRead(0x3B,14); accX = ((data[0] << 8) | data[1]); accY = ((data[2] << 8) | data[3]); accZ = ((data[4] << 8) | data[5]); tempRaw = ((data[6] << 8) | data[7]); gyroX = ((data[8] << 8) | data[9]); gyroY = ((data[10] << 8) | data[11]); gyroZ = ((data[12] << 8) | data[13]); /* Calculate the angls based on the different sensors and algorithm */ accYangle = (atan2(accX,accZ)+PI)*RAD_TO_DEG; accXangle = (atan2(accY,accZ)+PI)*RAD_TO_DEG; double gyroXrate = (double)gyroX/131.0; double gyroYrate = -((double)gyroY/131.0); gyroXangle += kalmanX.getRate()*((double)(micros()-timer)/1000000); // Calculate gyro angle using the unbiased rate gyroYangle += kalmanY.getRate()*((double)(micros()-timer)/1000000); kalAngleX = kalmanX.getAngle(accXangle, gyroXrate, (double)(micros()-timer)/1000000); // Calculate the angle using a Kalman filter kalAngleY = kalmanY.getAngle(accYangle, gyroYrate, (double)(micros()-timer)/1000000); timer = micros(); Serial.println(); Serial.print("X:"); Serial.print(kalAngleX,0); Serial.print(" "); Serial.print("Y:"); Serial.print(kalAngleY,0); Serial.println(" "); // The accelerometer's maximum samples rate is 1kHz } void i2cWrite(uint8_t registerAddress, uint8_t data){ Wire.beginTransmission(IMUAddress); Wire.write(registerAddress); Wire.write(data); Wire.endTransmission(); // Send stop } uint8_t* i2cRead(uint8_t registerAddress, uint8_t nbytes) { uint8_t data[nbytes]; Wire.beginTransmission(IMUAddress); Wire.write(registerAddress); Wire.endTransmission(false); // Don't release the bus Wire.requestFrom(IMUAddress, nbytes); // Send a repeated start and then release the bus after reading for(uint8_t i = 0; i < nbytes; i++) data [i]= Wire.read(); return data; }
Когда X и Y равны 180 — гироскоп в горизонтальной плоскости:
Вот вы определились с выбором и уже написали всё необходимое ПО, пришла пора его протестировать. Для этого, естественно, необходимо собрать всё вместе.
Наладка
Далее наступает самый ответственный этап – отладка программного кода. Здесь вам необходимо подключить питание к прибору, а сам прибор – к компьютеру, чтобы следить за строками в консоли. Прогоните несколько базовых функций и посмотрите, не будет ли ошибок или багов. Если они возникают, то воспользуйтесь любым удобным методом дебагинга.
Самый простой вариант – использовать для ввода переменные, которые вычисляются рандомным образом, и смотреть, как код будет вести себя в различных ситуациях.
Тестирование
После отладки необходимо провести тестирование. В чём разница? При тестировании вы точно знаете, что программный код работает без лагов и багов, но вам необходимо убедиться, что в нём нет логических ошибок.
С акселерометром и гироскопом проще всего использовать программы 3Д рендеринга показаний, вроде ShowGY521Data, которые позволят в реальном времени увидеть, как железо позиционируется в пространстве. В случае неисправностей всегда можно подправить нулевой уровень и уменьшить чувствительность акселерометра, который также влияет на конечную модель отображения устройства.
Используемые источники:
- https://mysku.ru/blog/china-stores/40178.html
- https://robotclass.ru/tutorials/arduino-accelerometer-mpu6050/
- https://arduinoplus.ru/arduino-giroskop/
 ESP8266 и Arduino, подключение, распиновка
ESP8266 и Arduino, подключение, распиновка Сигнализация на базе Ардуино своими руками
Сигнализация на базе Ардуино своими руками Датчики давления Arduino bmp280, bmp180, bme280
Датчики давления Arduino bmp280, bmp180, bme280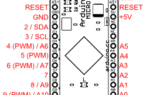 Arduino Pro Micro
Arduino Pro Micro