Перевел SaorY для mozgochiny.ru
Приветствую, мозгочины! Сегодня расскажу вам, как я своими руками создал Arduino-поделку — радиоуправляемый катер с опцией автопилота.


По сути, это мозгоруководство о создании автопилота на микроконтроллере Arduino, который можно установить в любую модель, тем самым превратив ее в радиоуправляемую поделку, даже не просто поделку, а автономного дрона. На сборку данной мозгоподелки меня вдохновили такие робо-катера как UBC Sailbot и Scout, который кстати, совершил успешный трансатлантический рейс.
Весь процесс создания катера с автопилотом занял у меня более года, и за это время я приобрел много знаний по теории автопилотирования и схемотехники, и думаю, что в один прекрасный день я применю их на настоящем катере моего отца.
Окончательная, завершенная версия катера с автопилотом основывается на решениях трех прототипов, первый из которых самый простой по схеме и коду, остальные более доработанные. Финальный катер представляет собой полнофункциональную радиоуправляемую модель, которая успешно плавает по глади пруда, что я постарался отобразить на фото. Эта версия хотя и окончательная, но может быть доработана и усовершенствована, как с точки зрения кода, лодку нужно научить следовать маршруту, а не просто от точки к точке, так и с точки зрения электроники, можно поставить акселерометр, чтобы он компенсировал наклон от компаса.
Шаг 1: Видеопрезентация
Небольшое видео обозначит направление этого мозгопроекта:
Шаг 2: Прототип 1

Первый катер, то есть прототип 1, был самый простой по исполнению и должен был уметь:
- считывать GPS-координаты своего положения
- считывать азимут с компаса
- управлять сервоприводом руля
- использовать руль для следования курсу
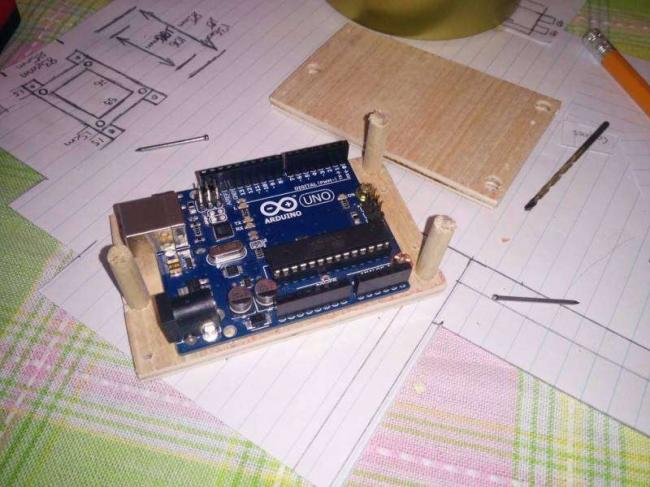
А так же на нем я тестировал формулы маневрирования для создания действующего автопилота. Основой прототипа 1 был микроконтроллер Arduino Uno, в финальной версии я использовал ATmega328.
Считывание GPS-координат
На первом прототипе я установил самый дешевый GPS-модуль который смог достать, это UBlox PCI-5. Для его монтажа нужно было лишь припаять четыре провода к задней стороне платы, подсоединить их к Arduino и прикрепить антенну. Для обработки поступающих данных я использовал библиотеку TinyGPS ++, которая позволила мне получить координаты текущего положения, скорость, направление и много другого! Подробнее о установке этого модуля, который кстати я использовал и в прототипе 2, вот в этом моем мозгоруководстве.
 Умный дом на базе Ардуино: пошаговая инструкция по сборке
Умный дом на базе Ардуино: пошаговая инструкция по сборкеСчитывание азимута
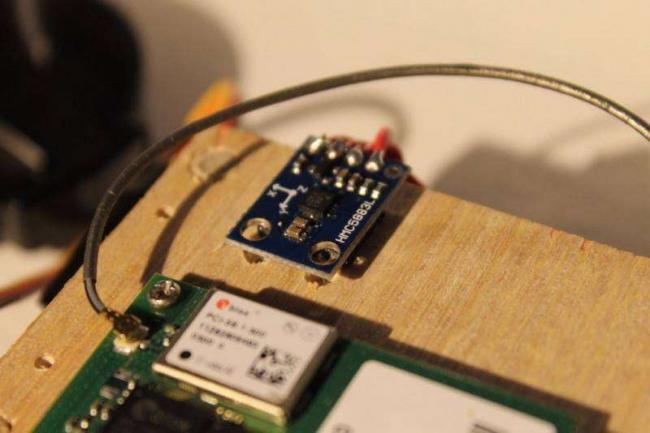
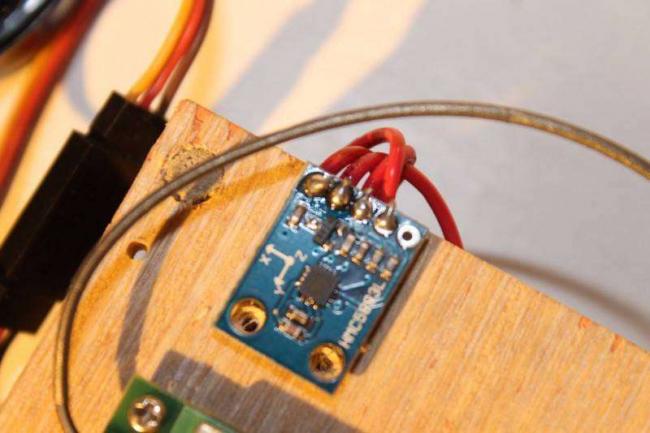
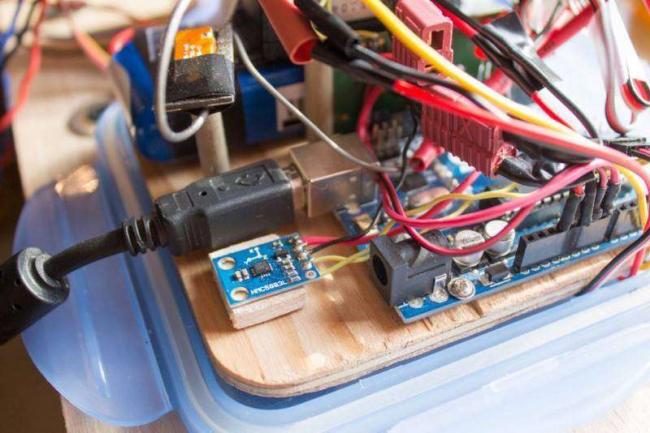
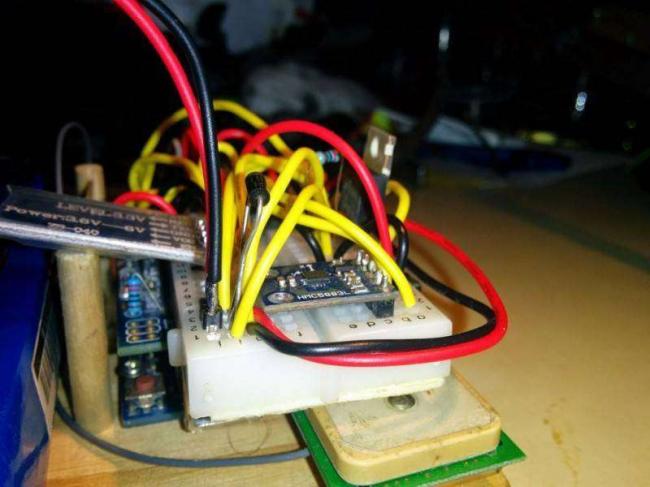
Чтобы получать данные с компаса я использовал HMC5883L, который легко подключается к микроконтроллеру через I2C. Как именно он устанавливается и как с ним работать хорошо описано здесь и здесь.
Управление сервоприводом руля
Контролировать сервопривод руля с помощью Arduino очень легко, но если только вы не используете библиотеку SoftwareSerial, которая нужна для TinyGPS ++, и которая конфликтует с одним таймеров Arduino! Запущенная SoftwareSerial мешает работе любого сервопривода использующего стандартную библиотеку, и решением данного мозгоконфликта является использование библиотеки PWM Servo library.
Формулы алгоритма автопилотирования
В прототипе 1 я применил несколько функций, которые позднее станут критичными. Эти функции используют формулу Хаверсина для расчета таких параметров как расстояние между двумя точками, направления от одной точки к следующей и реальный азимут по данным компаса. Более подробно об этих формулах в этой статье.
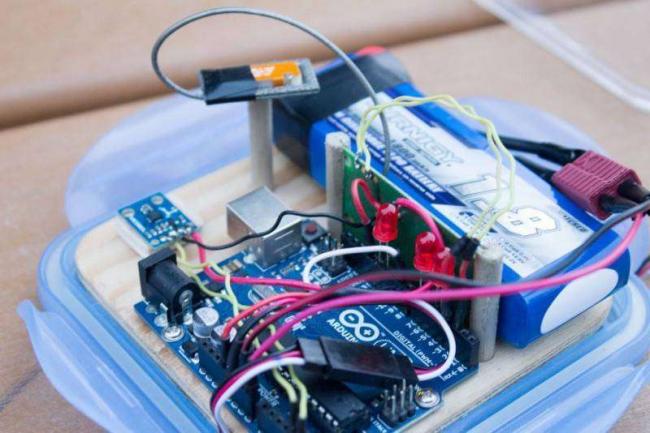
Сборка компонентов
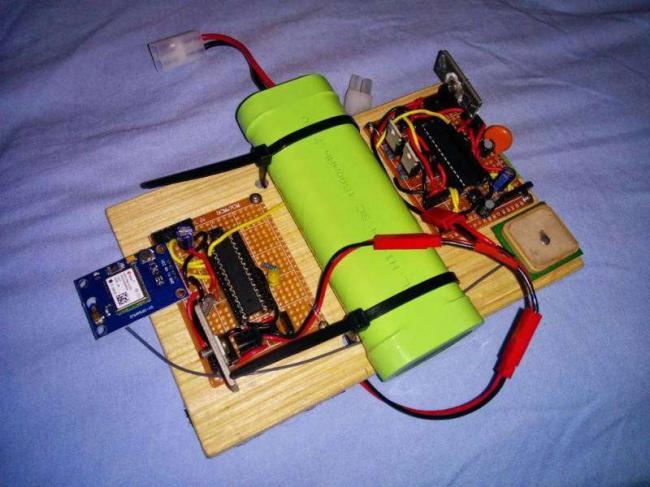
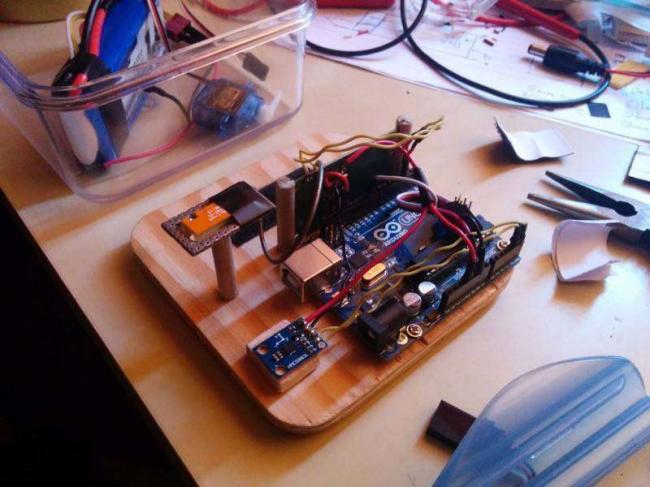
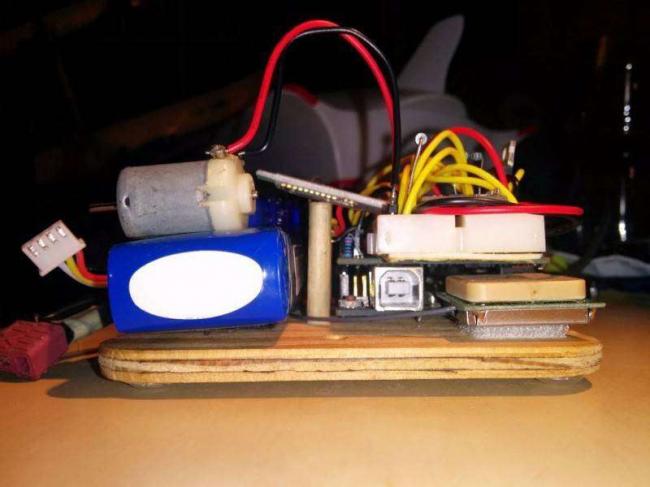
Компоненты первого прототипа я разместил на деревянном каркасе (см. фото), и теперь, зная положение этого каркаса-автопилота и сравнивая с заданным, можно поворачивать руль и сохранять заданный маршрут. Это будет полезно в дальнейшем для навигации по GPS-координатам.
Шаг 3: Прототип 2







Довольный результатами первой поделки я решил создать прототип 2 с программными доработками автопилота. Целями для второй самоделки были:
 Arduino Nano 3.0 распиновка
Arduino Nano 3.0 распиновка- плавание по заданным GPS-кооддинатам
- работа автопилота от аккумулятора
- тестирование и запись данных автопилота
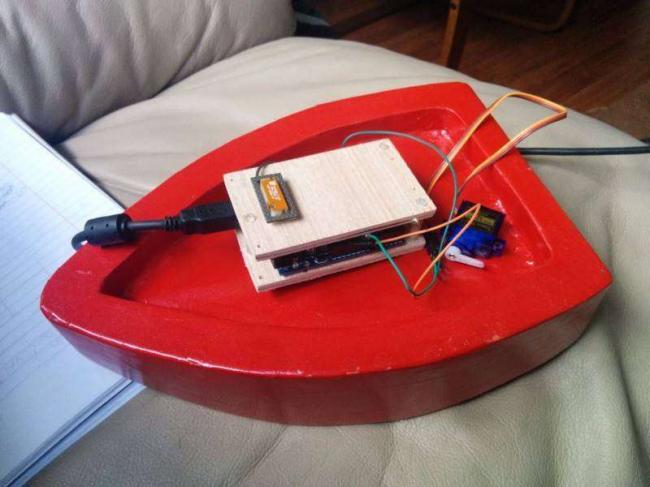
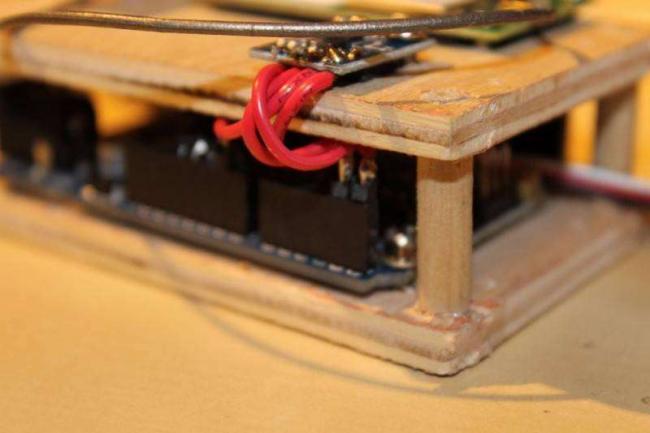
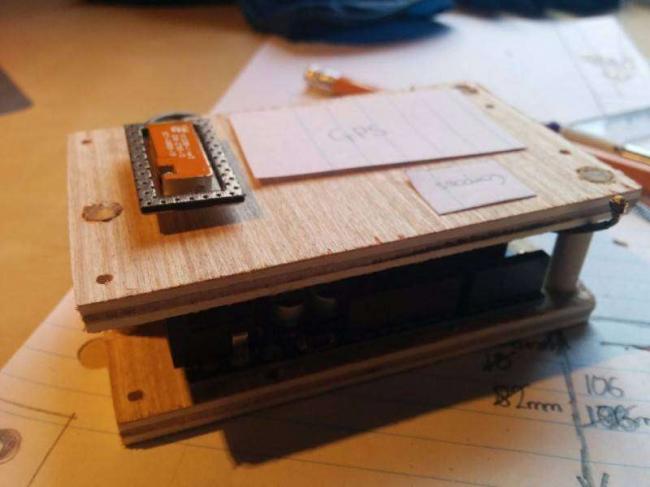
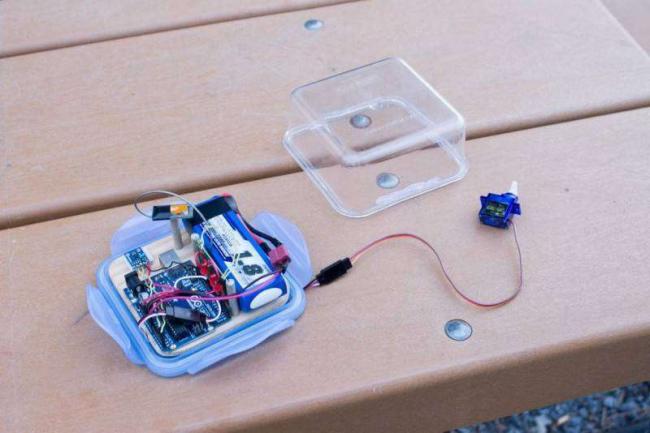
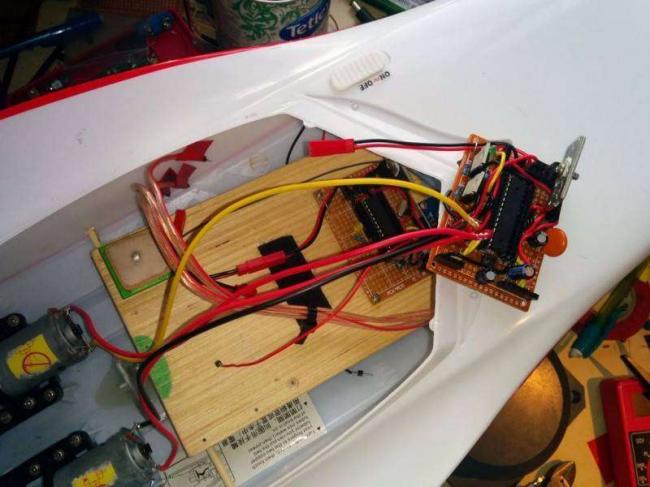
Конструкция автопилота также претерпела некоторые изменения — была добавлена макетная плата ProtoSheild, на которую я установил сам Arduino и компас. Все компоненты смонтировал на фанерное основание и “упаковал” в пластиковый контейнер.
В этот же контейнер я попытался добавить приемник дистанционного управления, но безуспешно из-за нехватки свободного места.
Плавание по заданным GPS-кооддинатам
Код для Arduino я написал таким образом, чтобы он поворачивал руль по направлению к следующей точке заданного маршрута: используя GPS-координаты для вычисления соотношений последующих точек и сравнивая их с компасом, вычисляется поворот руля. Если вычисленное значение правее, на 90 градусов, то руль повернется на 60 градусов. Если вычисленное значение левее, на 270 градусов, то руль повернется на 120 градусов. Если же значение находится между 330 и 30 градусами, то руль будет поворачиваться экспоненциально сохраняя положение прямо.
Все это будет происходить в цикле, примерно так (этот код обобщенный):
while(distanceInMeters(gpslat, gpslong, waypointlat, waypointlong) < 5) { int bearing = GetBearing(); int heading = GetHeading(gpslat, gpslong, waypointlat, waypointlong); bearing = RealBearing(gpslat, gpslong, bearing); RudderTurn(RudderAngle(bearing, heading)); }
Пояснение кода таково: если расстояние между катером и следующей точкой более 5 метров, то складывая азимут катера и азимут следующей точки, получается действительный азимут, оба азимута посылаются функции the RudderTurn function, которая вычисляет нужный угол поворота и соответственно поворачивает мозгоруль.
Установка аккумулятора
Запитать Arduino от аккумулятора довольно просто. Для этого на микроконтроллере есть контакт Vin, и на него можно подать до 20В постоянного тока. У меня была литиевая батарея на 12.6В, к которой я припаял разъем и подключил ее к контакту Vin на Arduino.
Шаг 4: Тестирование прототипа 2


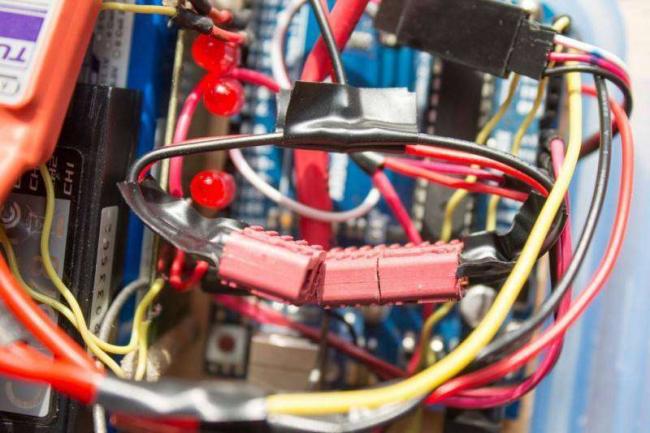
Для того чтобы проверить прототип в действии я установил два светодиода, первый из которых будет светиться когда зафиксируется GPS-координата, а второй, когда будет достигнута эта точка.
 Что такое Ардуино? Это свобода для изобретателя
Что такое Ардуино? Это свобода для изобретателяИспытание прототипа
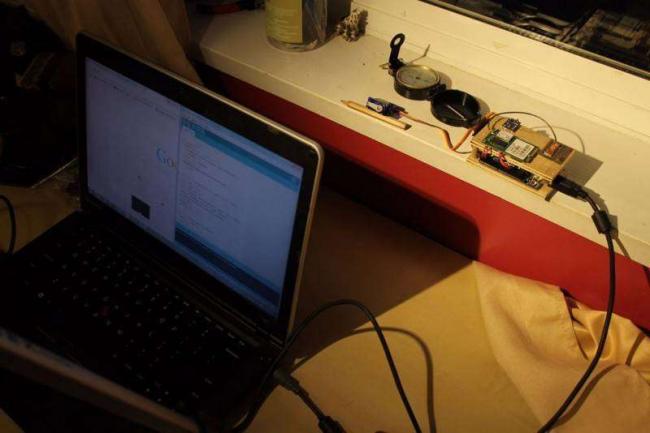
Пробы своего автопилота я проводил на местном поле. К своему ноутбуку я подключил автопилот и запустил последовательный монитор (часть программного обеспечения Arduino), который записывал GPS-координаты все время следования по заданным точкам. Я пользовался рулем который направлял меня к следующей точке, и я поворачивал, словно это был мозгокатер.
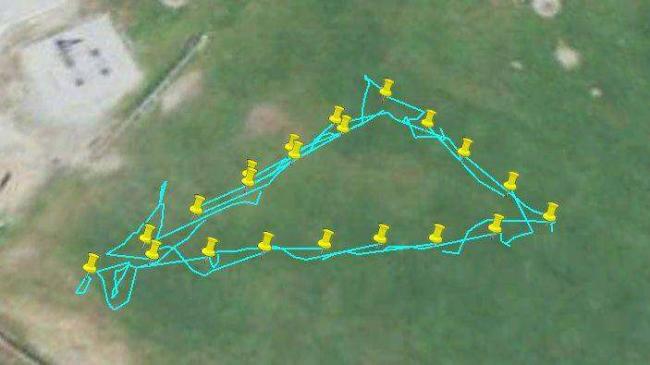
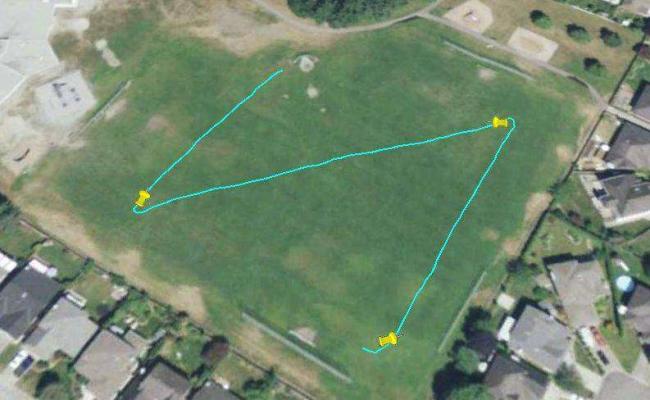
На представленных фото обозначен маршрут тестов. Если я оказывался ближе чем 5 метров к нужной точке, то автопилот переключался и начинал навигацию к следующей точке. В процессе этих тестов код поделки претерпел довольно много незначительных изменений.
Для конвертации последовательного текста в путь Google Earth, я импортировал текст в Excel, сохранив файл и далее следуя указаниям Earthpoint, преобразовывал файл в формат KML.
Шаг 5: Первое судно



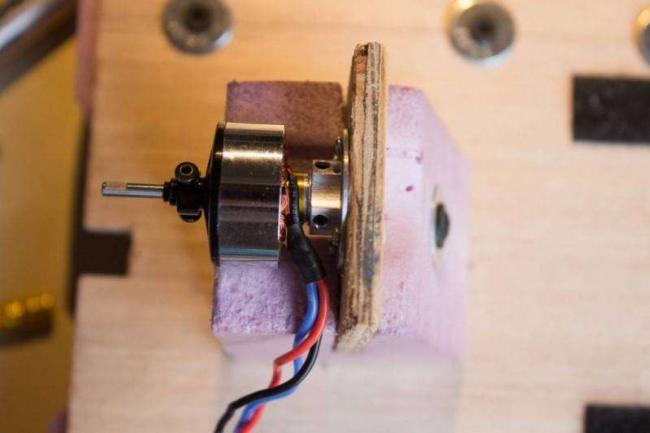

Судно, которое я сделал первым для этого проекта, было больше экспериментом, чем действующим прототипом. Просто я хотел посмотреть, смогу ли я создать функционирующий аэроглиссер самостоятельно или придется покупать.
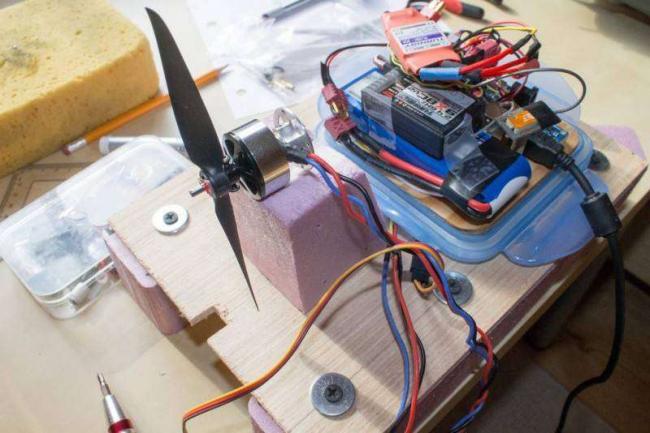
Почти все детали судна, включая палубу, вырезаны из пеноматериала. Для тяги мотор сначала я взял щеточный, но потом заменил его двигателем без щеток с пропеллером 5х3. Этот 9-ти граммовый сервомотор я смонтировал на задней панели, а для проводов идущих к нему в контейнере высверлил отверстие. Но в конце концов, эта самоделка не отправилась в плавание… Дело в том, что система ESC, которую я планировал использовать сгорела во время инцидента другого мозгопроекта, да еще GPS модуль наотрез отказался работать на поверхности пруда.
Шаг 6: Модифицированный катер



А теперь снова вернемся к чертежам катера! На известном онлайн-ресурсе я купил новый катер. В комплект к нему входили никель-металл-гидридный (Ni-MH) аккумулятор на 7.4В, зарядное устройство, передатчик и плата приемника. С передатчиком возникли небольшие проблемы — нужно было найти 12 батареек АА, и я остался разочарованным не работающим катером. Но, для проекта это не критично и я продолжил.
Я выпаял два Н-канальных MOSFET-транзистора из цепи приемника, они пригодятся позднее. После этого обрезал все провода и загерметизировал горячим клеем все щели и трещинки, которые нашел в корпусе катера.
Два двигателя катера имели сложную систему охлаждения — очень шумный пропеллер, который нагнетал воздух на двигатели, еще на моторах стояли шунтирующие конденсаторы, и оба этих момента работали в мою пользу. А вот для маленького переключателя на верхней стороне мозгокатера я не нашел более достойного применения.
Далее встал вопрос безопасного размещения прототипа и для его решения я использовал небольшую досочку к низу которой, в районе двигателей, приклеил деревянную палочку, а еще к доске и к корпусу катера приклеил застежку-липучку, удерживающей силы которой хватит для “спасения” автопилота при переворачивании катера.
Шаг 7: Прототип 3





Одним из недостатков двух предыдущих прототипов была медленная скорость обновления, то есть скорости реакции. Руль недостаточно быстро реагировал на изменение маршрута и этот момент был включен в список целей и задач нового прототипа:
- увеличение скорости реакции автопилота
- добавление контроллеров моторов
- программирование совместной работы двигателей
- установка приемника
Увеличение скорости реакции
Единственный минус библиотеки TinyGPS ++ это медленность. Проблема в том, что Arduino Uno не может выполнять две вещи одновременно (в принципе может, на деле — нет). Простым решением может стать еще один микроконтроллер Arduino, который с помощью библиотеки TinyGPS ++ будет обрабатывать данные GPS, а затем отправлять параметры на первый микроконтроллер автопилота. Но у меня не было еще одного Arduino.
Arduino Uno это, по существу, чип ATmega328 и еще несколько дополнительных компонентов. Зная это можно создать свой собственный Arduino на макетной плате. И для этого есть хорошее мозгоруководство.
К собранному самостоятельно Arduino, так же как и “старый” модуль, я подключил новый GPS-модуль Ublox NEO-6M. Для программинга самодельного Arduino использовал библиотеку Bill Porter’s Easy Transfer library, а “связал” оба микроконтроллера одиночным проводом, то есть односторонним последовательным соединением. Этот самодельный Arduino повысил скорость реакции автопилота с 4 Гц до 50 Гц!
Добавление контроллеров двигателей
Мне очень понравилась плата ProtoSheild для Arduino Uno, которую я использовал, но оказалось, что она не имеет достаточного пространства для крепления двух контроллеров двигателей. Поэтому я убрал эту мини-плату, и поставил другую, больших размеров.
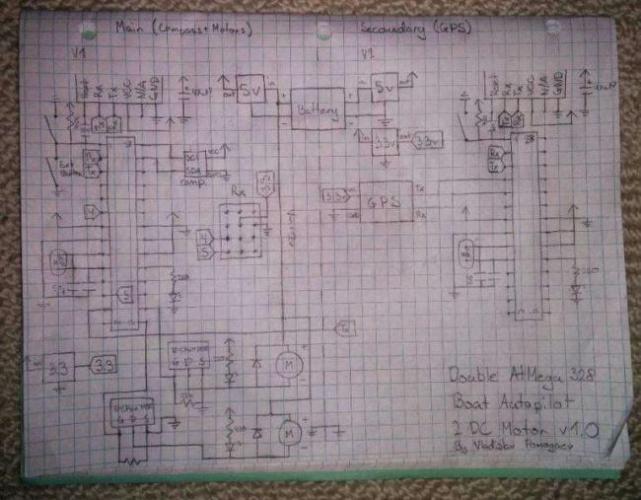
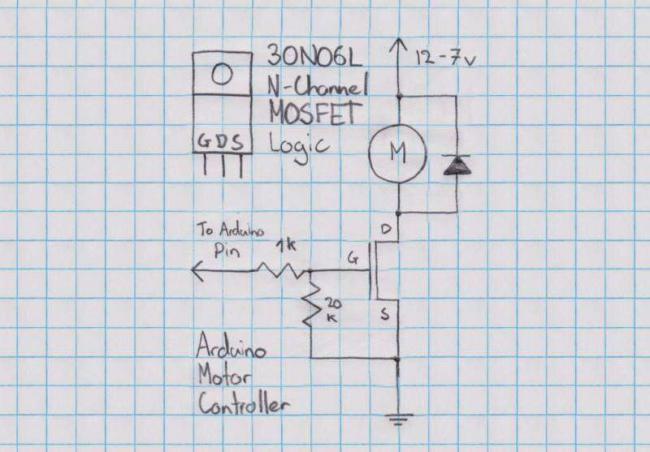
Электроцепь контроллеров двигателей проста: МОП-транзистор (MOSFET), с помощью ШИМ, контролирует среднее напряжение, идущее к двигателю. Резистор 1кОм ограничивает силу тока чтобы не перегорел Arduino, а резистор 10кОм удерживает MOSFET закрытым, когда отсутствует входящий сигнал.
Программирование взаимодействия моторов
У данного катера отсутствует штурвал, то есть руль, и вместо него для управления используется два мотора. Их то я и решил задействовать, а не устанавливать сервомотор для управления. Контроллеры моторов я уже собрал, осталось только запрограммировать Arduino для управления этими контроллерами.
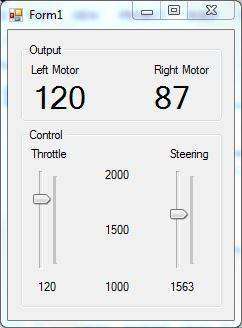
Программирование я начал с написания макета программы в начал с Visual Studio. По мере написания я отладил код, и в конце концов добился взаимодействия двигателей. Оставалось только переделать код с VS на Arduino, но это не трудно, так как языки C # и C ++ очень близки.
Установка приемника радиоуправления
На прототип я смонтировал приемник ДУ для ручного управления самоделкой. Это тоже довольно просто сделать, нужно лишь считывать входящие значения функцией pulseIn и “научить” реагировать автопилот на эти значения.
Испытание прототипа
Прототип автопилота я установил внутри катера, подключил двигатели к контроллерам и запрограммировал маршрут плавания по местном пруду. После прохождения трех точек, поделка перестала работать и “сгасла”. Оказалось, что высокое напряжение от аккумулятора (12 В) “спалило” регуляторы напряжения 5 В.
Продолжение следует…
(A-z Source)
>Купить в подарок или заказать уникальную вещь<
<blink>ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ! </blink>![]()
- Bluetooth-колонка на 40Вт своими руками— 21.05.2016
- Как сделать бетонную столешницу— 14.05.2016
- «Гигантская микросхема» или подставка для ног своими руками — часть 2— 10.05.2016
- «Гигантская микросхема» или подставка для ног своими руками — часть 1— 09.05.2016
- « Fantastic Plastic» или ЧПУ-фрезер для пластика своими руками— 08.05.2016
- Как сделать легендарный робот «Canbot»— 07.05.2016
- Как сделать магнитную панель для специй— 06.05.2016
- Как сделать POWERBANK из аккумулятора старого телефона— 05.05.2016
- Светильник «Ракета» своими руками— 04.05.2016
- Как сделать оригинальную подставку для книг— 03.05.2016
- Ночник со звездным узором своими руками— 02.05.2016
- Как сделать складной многофункциональный столик— 01.05.2016
- Столярный вытяжной стол— 30.04.2016
- «Пост-апокалиптические» очки своими руками— 17.04.2016
- Водонепроницаемый мешок своими руками (почти задаром)— 12.04.2016
Украшения из пров…Автономная сторож…Техноигрушки 21 в…Эмблема Бэтмена с…Необычные часы из…Как сделать нож д… Всем привет! Это опять я. Пост конечно мега неактуальный, он должен был выйти летом, но в силу разных обстоятельств, закончил этот проект только сейчас. Сегодня расскажу о своем самодельном катере на радиоуправлении. Кому интересно, читаем далее. Желание заиметь RC лодку довольно большого размера у меня было давно, но вот готовые лодки более 70см в длину, мягко говоря не радовали вкусными ценами. Придется строить самому. В поиске нашлись или совсем сложные модели с внутреним каркасом и обшивкой бальзой, или совсем детские поделки из куска пеноплекса и 190го моторчика. Искал я долго и все таки нашел. Вот оригинал сайта, с которого я брал чертежи. www.instructables.com/id/RC-Boat-2/ Правда в процессе постройки мне пришлось кое что доработать. Итак: для начала я построил, так сказать пробную модель из фанеры, затем, когда все получилось удачно приступил к постройке лодки из 2мм ПВХ пластика. Чертеж скачиваем, масштабируем под желаемые размеры лодки и распечатываем. У меня получилось 10 листов А4 при длине лодки в 830мм. Далее листы склеиваем и вырезаем шаблоны деталей .
Всем привет! Это опять я. Пост конечно мега неактуальный, он должен был выйти летом, но в силу разных обстоятельств, закончил этот проект только сейчас. Сегодня расскажу о своем самодельном катере на радиоуправлении. Кому интересно, читаем далее. Желание заиметь RC лодку довольно большого размера у меня было давно, но вот готовые лодки более 70см в длину, мягко говоря не радовали вкусными ценами. Придется строить самому. В поиске нашлись или совсем сложные модели с внутреним каркасом и обшивкой бальзой, или совсем детские поделки из куска пеноплекса и 190го моторчика. Искал я долго и все таки нашел. Вот оригинал сайта, с которого я брал чертежи. www.instructables.com/id/RC-Boat-2/ Правда в процессе постройки мне пришлось кое что доработать. Итак: для начала я построил, так сказать пробную модель из фанеры, затем, когда все получилось удачно приступил к постройке лодки из 2мм ПВХ пластика. Чертеж скачиваем, масштабируем под желаемые размеры лодки и распечатываем. У меня получилось 10 листов А4 при длине лодки в 830мм. Далее листы склеиваем и вырезаем шаблоны деталей . Затем накладываем шаблоны на материал, обводим и вырезаем. Первый раз работаю с ПВХ, и очень доволен. Режется ножницами, гибкий, не ломается. Получается вот так.
Затем накладываем шаблоны на материал, обводим и вырезаем. Первый раз работаю с ПВХ, и очень доволен. Режется ножницами, гибкий, не ломается. Получается вот так.  Как видим тут две половины днища, два борта и две детали транца. Теперь я хочу извиниться. Когда работал, был очень увлечен процессом и некоторые фото не делал. Поэтому вставляю фото изготовления фанерной лодки. Детали абсолютно одинаковые и операции делаем тоже такие же как и с пластиком. Зажимаем парные детали в тиски (не забыв подложить под губки мягкие накладки) и обрабатываем их наждачкой. Делается это для того, что бы парные детали были абсолютно одинаковы. Это избавит нас в будущем от всяческих нестыковок и перекосов. Две заготовки транца я сделал потому, что пластик ПВХ слишком мягкий и легко деформируется, а ведь это силовая деталь и к ней у нас крепится дейдвуд и руль. Склеиваем их вместе и обрабатываем наждачкой торцы. Если делаете лодку из фанеры, то такая операция не требуется. Далее к транцу приклеиваем половины днища и склеиваем их между собой вот так. И приклеиваем борта. Я клею все предварительно на циакрин. Теперь немного отличий от оригинального проекта. Поскольку, как я уже говорил, пластик ПВХ очень гибкий, что бы придать лодке бОльшую жескость на кручение и изгиб, я установил несколько дополнительных переборок, а также наклеил на борта полоску того же пластика шириной 7мм. Переборки я делал по месту, так что увы чертежей их нет. Далее, усиливаем все швы эпоксидкой со стеклотканью. Первые два отсека заполняю монтажной пеной. Предвижу возражения, мол так делать нельзя, мол пена гигроскопична… Отвечу, во первых, отсеки полностью будут герметичны, во вторых, пена гигроскопична только на этапе застывания. Полностью застывшая пена влагу не впитывает. Пена будет выполнять несколько функций. Во первых создаст необходимую плавучесть, если лодка вдруг перевернется и наберет воду, во вторых, придаст дополнительную жесткость и прочность передней части лодки, ну и при приклейке палубы, мы нанесем на нее эпоксидную смолу и палуба к ней намертво приклеется. Ну а пока пена сохнет займемся палубой. Берем оставшийся шаблон и обводим две половины палубы. Вырезаем ее и попутно вырезаем люк для доступа к потрохам лодки .Вырезанный кусок как раз будет крышкой. По торцу крышки и люка на палубе клею полосу шириной 7мм (ширина произвольная) .Приклеиваю палубу с установленной крышкой. Делаю из пеноплекса форму будующей кабины (рубки, надстройки ), обтягиваю стеклотканью с эпоксидкой. Приклеиваю к крышке и шпатлюю .Примеряю крышку и по вкусу добавляю воздухозаборников (но это, как говорится, на вкус и цвет…). Теперь необходимо изготовить продольные реданы. Делал их так: вырезал из ПВХ две полоски шириной по 5мм для каждого редана и склеил их для получения бОльшей толщины. Всего реданов 4. Клеим их на днище лодки .Стыки реданов с корпусом шпатлюю и шлифую. Не без косяков, но первый блин комом… Так, теперь пора браться и за внутренности лодки. Из текстолита изготавливаю две половины будущей моторамы. Делаю крепления для мотора, креплю мотораму к лодке и примеряю двигатель на место. Двигатель, к слову взял вот такой Это мотор 3670 на 2650kv. Брал тут: aliexpress.com/item/32887933319.html К мотору потребуется еще рубашка для водяного охлаждения Покупал я ее вот тут aliexpress.com/item/32836382632.html. Как видно на этом фото, на лодке уже установлена дейдвудная трубка. Дейдвуд вместе с гибким валом и креплением брал тут: aliexpress.com/item/32901173677.html Отверстие под него просверлил на расстоянии 15мм от торца транца (выбрал произвольно). Сразу же и установил крепление дейдвуда .Приступаю к изготовлению батарейных отсеков. Аккумуляторы использую от своего квадрокоптера, а именно Onbo 4S 4200mAh, так что отсеки изготавливаю под них. При чем по длине с запасом, что бы можно было двигать батареи и тем самым менять развесовку. Отсеки склеил из такого же ПВХ пластика что и лодку. Далее, накрываю дейдвуд кожухом и устанавливаю на него крепление сервопривода. Сервопривод взял вот такой Он отлично зарекомендовал себя на HSP Brontosaurus. Быстрый и достаточно мощный. Брал тут aliexpress.com/item/32737943372.html Так же устанавливаю перо руля брал тоже на Алике aliexpress.com/item/32802258440.html и транцевые плиты вот ссылка aliexpress.com/item/32860054980.html .
Как видим тут две половины днища, два борта и две детали транца. Теперь я хочу извиниться. Когда работал, был очень увлечен процессом и некоторые фото не делал. Поэтому вставляю фото изготовления фанерной лодки. Детали абсолютно одинаковые и операции делаем тоже такие же как и с пластиком. Зажимаем парные детали в тиски (не забыв подложить под губки мягкие накладки) и обрабатываем их наждачкой. Делается это для того, что бы парные детали были абсолютно одинаковы. Это избавит нас в будущем от всяческих нестыковок и перекосов. Две заготовки транца я сделал потому, что пластик ПВХ слишком мягкий и легко деформируется, а ведь это силовая деталь и к ней у нас крепится дейдвуд и руль. Склеиваем их вместе и обрабатываем наждачкой торцы. Если делаете лодку из фанеры, то такая операция не требуется. Далее к транцу приклеиваем половины днища и склеиваем их между собой вот так. И приклеиваем борта. Я клею все предварительно на циакрин. Теперь немного отличий от оригинального проекта. Поскольку, как я уже говорил, пластик ПВХ очень гибкий, что бы придать лодке бОльшую жескость на кручение и изгиб, я установил несколько дополнительных переборок, а также наклеил на борта полоску того же пластика шириной 7мм. Переборки я делал по месту, так что увы чертежей их нет. Далее, усиливаем все швы эпоксидкой со стеклотканью. Первые два отсека заполняю монтажной пеной. Предвижу возражения, мол так делать нельзя, мол пена гигроскопична… Отвечу, во первых, отсеки полностью будут герметичны, во вторых, пена гигроскопична только на этапе застывания. Полностью застывшая пена влагу не впитывает. Пена будет выполнять несколько функций. Во первых создаст необходимую плавучесть, если лодка вдруг перевернется и наберет воду, во вторых, придаст дополнительную жесткость и прочность передней части лодки, ну и при приклейке палубы, мы нанесем на нее эпоксидную смолу и палуба к ней намертво приклеется. Ну а пока пена сохнет займемся палубой. Берем оставшийся шаблон и обводим две половины палубы. Вырезаем ее и попутно вырезаем люк для доступа к потрохам лодки .Вырезанный кусок как раз будет крышкой. По торцу крышки и люка на палубе клею полосу шириной 7мм (ширина произвольная) .Приклеиваю палубу с установленной крышкой. Делаю из пеноплекса форму будующей кабины (рубки, надстройки ), обтягиваю стеклотканью с эпоксидкой. Приклеиваю к крышке и шпатлюю .Примеряю крышку и по вкусу добавляю воздухозаборников (но это, как говорится, на вкус и цвет…). Теперь необходимо изготовить продольные реданы. Делал их так: вырезал из ПВХ две полоски шириной по 5мм для каждого редана и склеил их для получения бОльшей толщины. Всего реданов 4. Клеим их на днище лодки .Стыки реданов с корпусом шпатлюю и шлифую. Не без косяков, но первый блин комом… Так, теперь пора браться и за внутренности лодки. Из текстолита изготавливаю две половины будущей моторамы. Делаю крепления для мотора, креплю мотораму к лодке и примеряю двигатель на место. Двигатель, к слову взял вот такой Это мотор 3670 на 2650kv. Брал тут: aliexpress.com/item/32887933319.html К мотору потребуется еще рубашка для водяного охлаждения Покупал я ее вот тут aliexpress.com/item/32836382632.html. Как видно на этом фото, на лодке уже установлена дейдвудная трубка. Дейдвуд вместе с гибким валом и креплением брал тут: aliexpress.com/item/32901173677.html Отверстие под него просверлил на расстоянии 15мм от торца транца (выбрал произвольно). Сразу же и установил крепление дейдвуда .Приступаю к изготовлению батарейных отсеков. Аккумуляторы использую от своего квадрокоптера, а именно Onbo 4S 4200mAh, так что отсеки изготавливаю под них. При чем по длине с запасом, что бы можно было двигать батареи и тем самым менять развесовку. Отсеки склеил из такого же ПВХ пластика что и лодку. Далее, накрываю дейдвуд кожухом и устанавливаю на него крепление сервопривода. Сервопривод взял вот такой Он отлично зарекомендовал себя на HSP Brontosaurus. Быстрый и достаточно мощный. Брал тут aliexpress.com/item/32737943372.html Так же устанавливаю перо руля брал тоже на Алике aliexpress.com/item/32802258440.html и транцевые плиты вот ссылка aliexpress.com/item/32860054980.html .





Ранее Мастер показал секрет строительства своими руками простого колесного кораблика на резиномоторе. Такие модели весьма эффектны, наверное благодаря неспешным звукам работы лопастей колеса по воде. В ходе строительства кораблика отработана технология изготовления шестилопасного гребного колеса. Давайте сделаем колесный кораблик — пароходик на радиоуправление и с электродвигателем достаточной мощности для длительной работы игрушки. Почему в названии пароходик? Наверное потому, что большая часть колесных кораблей оснащалась паровыми машинами. При строительсве пароходика будет применена самодельная рулевая машинка из деталей HDD.
Как сделать радиоуправляемый катер своими руками
Как сделать радиоуправляемый колесный катер пароход своими руками / Кораблик Секрет Мастера
Для строительства кораблика потребуются.
Материалы. Кусок плотного пенопласта толщиной 25 мм, 6 пластиковых карточек, машинка на радиоуправлении, cтарый HDD, обрезки потолочной плитки (использованы куски от строительства планера), кусок мягкой проволоки, корпус от шариковой ручки или фломастера, банковскя резинка, два изолированных продка и пара зубочисток.
Инструмент. концелярский нож, пила по металлу, отвертки звездочки, паяльник, пистолет для термоклея, ножницы и плоскогубцы.
Мастер класс простой но требует навыков работы с инструментами и пониманием процессов строительства. Инструкция представлена в пошаговом виде.
Шаг 1. Рулевая машинка сделана из старого HDD, подробная технология именно для этого кораблика изложена здесь и показана на фото.
Шаг 2. Специально для строительства у китайских братьев куплена простая (200 р. 2016 год) радиоуправляемая машинка. Ссылка на покупку здесь. Электроника двухкомандная. Основание машинки разделено на два отсека — моторный и батарейный с электроникой. Допустимо не разделять основание, но тогда придеться уделить больше внимания балансировке пароходика на воде. Провода питания двигателя отпаиваются и припаиваются новые. Проводники питания от двигателя припаиваются к серво мотору рулевой машинки. Схема соединений показана на фото.
Шаг 3. Изготавливаем гребные колеса. Полное руководство смотрим здесь. Колеса делаются из половинок разрезанных вдоль карточек. Смотри фото.
Шаг 4. Присоединение гребных колес к моторному отсеку. Колеса машинки при помощи плоскогубцев разрушаются. На осях должны остаться только утолщения крепления колес. Из старой авторучки или фломастера вырезаем два цилиндра длиной 40-50 мм и делаем в них три пропила для прохода лопастей. При помощи термоклея закрепляем цилиндры на гребных колесах. Смотри видео. Удлиненные оси закрепляем на валу также термоклеем — смотри видео! Удлинение необходимо из-за ширины корпуса кораблика для сохранения необходимой остойчивости на воде.
Шаг 5. Строительство корпуса. Корпус вырезан ножом или пилой из пенопласта пеноплекс толщиной 25 мм. Смотри чертеж на фото. Посадочные гнезда под рулевую машинку, моторный и батарейный отсек сделаны по технологии показанной здесь. Моторный отсек полностью не заглубляется. Для лучшей устойчивости на курсе и защиты руля от водорослей установлен небольшой киль из пластиковой карточки. Киль закреплен термоклеем
Устанавливаем рулевую машинку, моторный и батарейный отскек. Соединяем все проводники и проверяем работу кораблика до спуска на воду. при помощи банковской резинки и зубочистуи воткнутой в корпус выставляем положение руля в центре. Подаем питание. Двигатель должен заработать и колеса начнуть вращаться, если вращение в неправильную сторону, то следует перепаять проводники питания,изменив полярность подключения. Проверяем работу пульта. Руль должен отклоняться влево и вправо по командам с пульта управления.
Шаг 6. Изготовление надстроек. При работе гребных колес может происходить захлестывание воды на палубу, что нежелательно. Для защиты от воды были сделаны из потолочной плитки эффектые кожухи колес и рубка. Труба сделана из алюминиевой банки. Как сгибать потолочную плитку подробно изложено здесь. надстойки закреплены термоклеем.
Самодельный колесный радиоуправляемый катер от Sekretmastera. Испытания
Испытания кораблика с самодельной рулевой машинкой показаны на видео. В отличии от винтовых катеров пароходик на гребных колесах не теряет ход при попадании в водоросли и продолжает движение. Движение колес радует глаз. Игрушка получилась на ура! Возможно дальнейшее развитие темы.
Понравилась идея? Сделай репост, оставь комментарий. Поддержи авторов! Подпишись на видеоканал Секрет мастера!
Используемые источники:
- http://mozgochiny.ru/electronics-2/kak-sdelat-rc-kater-s-optsiey-avtopilota/
- https://mysku.ru/blog/diy/69744.html
- https://sekret-mastera.ru/igrushki-2/radioupravlyaemyj-kolesnyj-kater.html

 НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ).
НОВИНКА 2016 года! ЭЛЕКТРОНИКА ДЛЯ НАЧИНАЮЩИХ. БАЗОВЫЙ НАБОР ЭЛЕКТРОННЫХ КОМПОНЕНТОВ+КНИГА (11 ЭКСПЕРИМЕНТОВ). ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress
Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress Прошивка и русификация Xiaomi Redmi Note 3 МТК
Прошивка и русификация Xiaomi Redmi Note 3 МТК