Сервоприводы — это устройства, которые предназначены для управления приборами. Осуществляется этот процесс при помощи обратной связи. На сегодняшний день различают асинхронные и синхронные модификации. По устройству модели могут довольно сильно различаться. Также следует учитывать, что существуют модификации линейного типа. Отличаются они большим параметром ускорения.
По принципу действия сервоприводы бывают электромеханического и электрогидромеханического типов. Встретить вышеуказанные приборы чаще всего можно в промышленной сфере. Там они отвечают за работу различного оборудования. В частности, сервоприводы занимаются управлением станков.
Устройство
Схема сервопривода включает в себя датчик, блок питания, а также плату управления. Дополнительно в моделях можно встретить конвертер. Чаще всего он устанавливается линейного типа. В данном случае многое зависит от привода. Представлен он в сервоприводе, как правило, в виде электромотора с редуктором. Однако на сегодняшний день имеется множество модификаций с пневмоцилиндрами.
Как собрать модель?
Сделать сервопривод своими руками довольно просто. Если рассматривать простую модификацию, то в первую очередь следует подобрать корпус для устройства. В данном случае многое зависит от габаритов привода. Для самодельного устройства целесообразнее использовать маломощный электродвигатель. При этом редукторная коробка должна быть установлена рядом.
Далее, чтобы собрать сервопривод своими руками, нужно подобрать потенциометр аналогового типа. В магазине его найти не составит труда. После этого следует заняться установкой датчика. Как правило, плата управления подбирается серии РР20. Для поворотных регуляторов она подходит хорошо. В конце работы останется только установить конвертер. Все это необходимо для того, чтобы подсоединить устройство к сети.
Модель для отопления
Сервопривод для отопления в наше время является очень востребованным. Отличаются данные устройства высоким параметром предельной частоты. Двигатели чаще всего в моделях используются асинхронного типа. При этом мощность их находится на уровне 2 кВт. Для передачи вращательного момента на вал используются малые шестерни. На сегодняшний день наиболее распространенным принято считать сервопривод для отопления с аналоговыми потенциометрами.
Однако цифровые модели также не являются редкостью. Для повышения пропускной способности устройства применяются специальные контроллеры. При этом управленческие платы устанавливаются самые разнообразные. Для подключения устройства к сети стандартно используются конвертеры. В наше время чаще всего их можно встретить линейного типа. Ремонт сервопривода для отопления может делаться только в сервисном центре.

Устройство с клапаном
Клапан с сервоприводом, как правило, используется в промышленной сфере. Там он способен отвечать за регулировку станков. Отличительной особенностью данных моделей принято считать мощные двигатели. При этом параметр предельной частоты у них достигает 22 Гц. Все это, в конечном счете, дает приборам хорошее ускорение. Непосредственно моторы можно встретить в основном асинхронного типа. Соединение с валом клапан с сервоприводом имеет шестерного типа. Регуляторы в таких устройствах встречаются поворотного и кнопочного вида. В данном случае клапаны могут использоваться только односторонние.
 🚘 Камера заднего вида на ваше авто: как правильно выбрать и установить устройство
🚘 Камера заднего вида на ваше авто: как правильно выбрать и установить устройствоМодель для печки
Сервопривод печки в среднем мощность имеет на уроне 2 кВт. Двигатели чаще всего устанавливаются асинхронного типа с предельной частотой на отметке в 31 Гц. Отличительной особенностью таких устройств принято считать наличие резистивного элемента. В его обязанности входит повышение пропускной способности модели. Редукторы чаще всего устанавливаются низкочастотного типа. Дополнительно следует отметить, что на рынке представлено множество модификаций с потенциометрами.
Управленческие платы, как правило, имеются серии РР20. Для многофункционального контроля печки они подходят идеально. В данной ситуации выходные валы подсоединяются напрямую к коробке редуктора. Все это необходимо для того, чтобы повысить крутящий момент. В качестве рычага производители используют плечо. Устанавливается оно, как правило, не большого размера. Подключается сервопривод печки к сети через специальные контакты на конвертере. В данном случае статор к устройству подсоединять можно. Дополнительно сервопривод отлично способен выполнять функции усилителя.
Устройство для регулировки заслонки
Сервопривод заслонки можно сделать даже самостоятельно. В данной ситуации электромотор имеет смысл подбирать с мощностью не более 2 кВт. В противном случае выходной вал не выдержит больших нагрузок и поломается. При сборке в первую очередь устанавливается коробка редуктора. Пневмоцилиндрические устройства используются довольно редко.
Статоры в сервопривод заслонки монтируются часто электронного типа. Конвертер устанавливается в модель только после плеча. Затем необходимо уделить внимание управленческой плате. Выходной вал в данном случае должен быть закреплен на оси. Для этого подбирают металлическую проволоку не больших размеров. В последнюю очередь останется только подсоединить проводы к конвертеру. Далее их напрямую появится возможность подключить к блоку управления.
Модель с краном
Кран с сервоприводом позволяет регулировать напор воды. Встретить прибор данного типа чаще всего можно в промышленной сфере. В данном случае используются только пневмоцилиндры. В свою очередь электромоторы встречаются довольно редко. Статорные коробки для сервопривода подходят ручного типа. Для регулировки устройства обязана быть предусмотрена специальная плата.
На сегодняшний день многие производители отдают предпочтение модификации РР20. Непосредственно контроллеры устанавливаются поворотного типа. Подключение сервопривода к сети осуществляется при помощи конвертера. На рынке в наше время представлены как нелинейные, так и линейные его типы.

Синхронные модификации
Синхронный сервопривод — что это? На самом деле указанное устройство используется для регулировки станков. При этом в вентиляционных системах они также являются востребованным. Датчики у моделей устанавливаются, как правило, проворного типа. В данном случае мощность двигателя может варьироваться от 1 до 3 кВт. Отдельного внимания в устройствах заслуживает конвертер. Устанавливается он, как правило, на два контакта. Однако имеются и другие модификации.
Статоры используются цифрового типа, и регулировать их можно при помощи котроллера. Еще одной отличительной чертой данных устройств принято считать наличие энкодеров. Данные детали необходимы для обратной связи. Параметр предельной частоты у сервоприводов не превышает 35 Гц. Подключение устройства к сети осуществляется только через клеммы. Дополнительно следует отметить, что резистивные механизмы используются, как правило, низкочастотного типа. Самостоятельно сложить сервопривод довольно сложно. Однако в данном случае многое зависит от типа управленческой платы.
 Пинпоинтер своими руками: схема, описание. Самодельный пинпоинтер
Пинпоинтер своими руками: схема, описание. Самодельный пинпоинтерАсинхронные сервоприводы
Асинхронный сервопривод — что это? В действительности указанное устройство предназначено исключительно для оборудования, которое блок питания имеет на 15 В. В этом случае мощность прибора, как правило, не превышает 2 кВт. Нагрузку максимум потенциометр в моделях способен выдерживать на уровне 23 А. Для передачи крутящего момента от мотора используются не большого диаметра выходные валы. При этом рычаг двигается за счет шестерни.
Изменение частоты вращения происходит благодаря котроллеру. Управление сервоприводом осуществляется при помощи специальной платы. В некоторых случаях для изменения положения регулятора используется плечо. Резистивные устройства чаще всего устанавливаются низкочастотные. При этом сервоприводы на пневмоцилиндрах в наше время встречаются довольно редко. Чтобы самостоятельно собрать такую модификацию, потребуется мощный редуктор. Также для него следует подобрать статор ручного типа.
Сервоприводные модификации линейного движения
Линейного движения сервопривод — что это? На самом деле указанное устройство является регулятором с обратной связью. На сегодняшний день модели очень востребованы. Для различных систем отопления они подходят идеально. Конвертеры в них чаще всего используются на три контакта. Статорные коробки устанавливаются различной мощности. Двигатели могут использоваться только синхронного типа.
В противном случае блоки питания не выдерживают предельного напряжения. В качестве приводов в данной ситуации применяются редукторные коробки. Для передачи крутящего момента от двигателя используются шестерни. Да сегодняшний день на рынке представлено множество модификаций с выходным валом. В данном случае регулировать скорость оборотов можно при помощи котроллера. Также следует помнить, что в устройствах имеются специальные платы. Устанавливаются они с маркировкой Р20. Смена режима в данном случае производится за счет контроллера. Роторные модификации сервоприводов в наше время встречаются довольно редко. Используются они чаще всего для управления станками.
Устройства для промышленных роботов
Для промышленных роботов сервопривод — что это? В действительности указанное устройство является многофункциональным котроллером. В данном случае платы используются серии РР30. За счет этого у пользователя открывается возможность регулировать параметр предельной частоты. В среднем он колеблется в районе 25 Гц. Работают устройства данного типа от блоков питания на 15 В.
Управление сервоприводом осуществляется часто при помощи регулятора поворотного типа. Однако цифровые аналоги в наше время не являются редкостью. Роторы применяются в устройствах исключительно низкочастотные. Все это необходимо для быстрого ускорения сервопривода. Потенциометры можно встретить как аналогового, так и цифрового типа. Редукторные коробки по конструкции могут довольно сильно отличаться. Самостоятельно собрать сервопривод указанного типа сложно. В данном случае проблема заключается в поиске нужного контролера.
Сервоприводные модели для полиграфических станков
Для полиграфических станков модели необходимы с синхронными типами моторов. Мощность их обязана достигать 2 кВт. Параметр предельной частоты приветствуется на уровне 30 Гц. На сегодняшний день большинство производителей выпускают сервоприводы с аналоговыми потенциометрами. Также следует отметить, что редукторные коробки, как правило, используются плоские. Все это необходимо для того, чтобы устройство было компактным.
Отдельного внимания в сервоприводах данного типа заслуживают роторы. Показатель проводимости у них обязан минимум составлять 3 мк. Все это необходимо для хорошего ускорения. Выходные валы в данном случае используются небольшого диаметра. Конвертеры чаще всего можно встретить на три контакта. Для блоков питания на 20 В они подходят идеально. Статорные коробки устанавливаются различной формы и по конструкции могут сильно различаться. В этой ситуации многое зависит от энкодера, который установлен в сервоприводе.
Устройства для швейных машин
Сервоприводы данного типа отличаются от прочих устройств своей компактностью. Двигатели у таких моделей чаще всего можно встретить асинхронного типа. От сети с напряжением 220 В они работают без каких-либо проблем. Регулятор в данном случае используется поворотного типа. Максимум параметр предельной мощности достигает 1.2 кВт. Пороговая частота в этой ситуации едва доходит до отметки 20 Гц. Потенциометры используются только аналогового типа.
 Таблица углов заточки ножей: как правильно заточить нож
Таблица углов заточки ножей: как правильно заточить ножРедукторные коробки для этой модификации подходят маломощные. Сервоприводы на две шестерни попадаются довольно часто. Однако в основном устанавливаются роторы для передачи крутящего момента от мотора. Выходные валы обладают малой частотой вращения. При этом нагрузка на плечо оказывается небольшая. Контроллеры в данном случае используются одноканальные. При этом менять параметр мощности у пользователя нет возможности. Датчик обратной связи в сервоприводах данного типа располагается возле статора.
Сервоприводные модификации для упаковочных станков
Модель данного типа чаще всего работает от движения пневмоцилиндров. При этом блоки питания часто используются на 12 В. В данном случае системы защиты устанавливаются довольно часто. Конвертеры можно встретить на два и три контакта. Статорные коробки устанавливаются различной конфигурации. В некоторых случаях датчики обратной связи в сервоприводах заменяются энкодерами. Роторные коробки на предельное напряжение должны быть рассчитаны в районе 12 В. Резистивные механизмы в устройствах встречаются довольно редко.
Самостоятельно собрать сервопривод данного типа можно. С этой целью лучше всего подобрать аналоговый потенциометр. При этом конвертер лучше использовать на два контакта. Вместо энкодера многие специалисты рекомендуют применять датчики обратной связи. Однако для их успешной эксплуатации необходимо проверить устройство на чувствительность. Регулятор проще всего использовать поворотного типа из пластика. Модуляторы применяются только одноканальные.
Всем хабраконструкторам, привет! Пришла мне как-то в голову дурацкая мысль: собрать девайс, который бы молотком забивал гвозди. Просто ради демонстрации работы сервопривода. Алгоритм простой: даём команду на поднятие молотка, ждём пока он поднимется, отпускаем молоток; и так пока гвоздь не будет забит. Но как узнать, что молоток поднялся и что гвоздь забит, не пользуясь дополнительными датчиками? Спросить у «глупого» сервопривода! Как именно это сделать — об этом и пойдёт речь в статье. Что такое сервопривод? Наверное, все знают, но на всякий случай: это привод, который в отличие от мотора постоянного тока не просто крутится пока подаётся напряжение, а стремится повернуться к заданному углу и удержаться в этом положении. Угол устанавливается с помощью ШИМ (PWM)-сигнала. Сервопривод стремится к определённому положению, а следовательно должен знать своё собственное. Перед началом сборки я был уверен, что запросить текущий угол будет проще простого и это возможно «из коробки». Не тут то было. Но обо всём по порядку. Итак, предполагаемый девайс: сервопривод с прикреплённым к нему молотком на небольшом постаменте для равновесия. Сервопривод подключается к Arduino через IO Shield, а микроконтроллер исполняет алгоритм:
- Установить сервоприводу определённый угол для поднятия молотка
- Бездействовать пока сервопривод не сообщит, что угол достигнут
- Отключить питание сервопривода, чтобы молоток упал на гвоздь
- Прочитать угол в упавшем положении
- Если угол после падения несколько раз подряд не изменился — значит гвоздь перестал вколачиваться. Предположительно он забит — прекращаем исполнение
- Если угол изменился, начинаем сначала
Берём исходные части: Пилим и скручиваем: Приступаем к написанию прошивки для Arduino… Довольно быстро становится понятно, что установить определённый угол для сервы — не проблема. В частности, это позволяет сделать стандартная библиотека Servo, которая из заданного в градусах угла формирует соответствующий PWM-сигнал. А вот с чтением — проблема: функции для этого нет. Быстро погуглив проблему, нашёл кучу сообщений на форумах, где на этот вопрос авторитетно отвечали: «Это не возможно! Сервоприводы — это write-only устройства». Меня это привело в замешательство, я интуитивно чувствовал, что достать эти данные как-то просто можно.
Матчасть
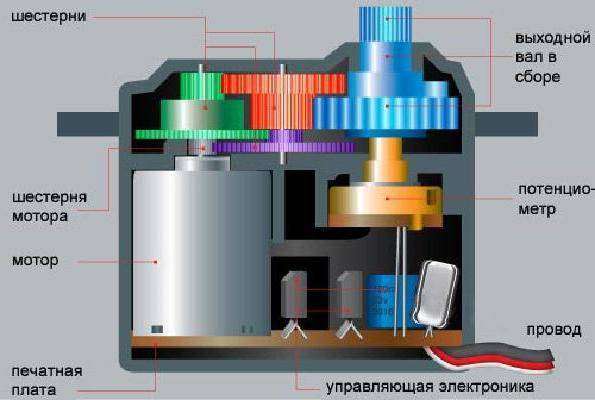
После недолгих поисков в сети можно понять как устроена серва. Это обычный мотор постоянного тока, который соединён с выведенным шпинделем через несколько шестерней, формирующих пониженную передачу. Этот же шпиндель с внутренней стороны физически прикреплён к потенциометру (подстроечному резистору). При вращении мотора шпиндель поворачивается, поворачивается и бегунок потенциометра, выходное напряжение потенциометра меняется, мозги сервы его считывают и если напряжение достигло заданного уровня — цель достигнута, мотор отключается от питания. То есть, у нас есть потенциометр, по сигналу с которого можно определить текущий угол. Осталось только разобрать сервопривод и подключиться в нужном месте. Разбираем: Сразу скажу, что сервопривод с фотографии я безвозвратно сломал в процессе разборки. Не нужно было вообще выламывать плату с электроникой, достаточно просто снять заднюю крышку, которая держится на 4-х винтах. Но сразу это было не очевидно, и чтобы понять куда на плате припаян потенциометр, пришлось пожертвовать одним приводом. Вот как припаян потенциометр на сервоприводах от DFRobot: Нам нужен сигнал с бегунка, который меняется в зависимости от угла поворота от минимального до максимального напряжения. Берём мультиметр, вращаем шпиндель и смотрим: каким углам какой сигнал соответствует. Для моей сервы углу в 0° соответствует напряжение 0.43 В, а максимальному углу поворота в 180° соответствует напряжение 2.56 В. Аккуратно припаиваем новый сигнальный провод. Подключаем его к аналоговому входу A5 на Arduino. Закрываем крышку. Пишем программу:
#include // разрешене аналогого порта #define A_MAX 1024 // опорное напряжение на котором работает серва #define A_VREF 5 // предельные уровни сигнала с сервы #define A_VMIN 0.43 #define A_VMAX 2.56 Servo servo; int lastHitAngle = 0; int hitAngleMatches = 0; bool jobDone = false; /* * Возвращает текущий угол поворота сервы исходя * из сигнала с его потенциометра */ int realAngle() { return map( analogRead(A5), A_MAX * A_VMIN / A_VREF, A_MAX * A_VMAX / A_VREF, 0, 180); } void setup() { } void loop() { if (jobDone) return; // включаем серву и просим повернуться до положения 70° servo.attach(6); servo.write(70); // ждём поворота. 5° запаса на всякие погрешности while (realAngle() < 65) ; // бросаем молоток и ждём немного пока он успокоится servo.detach(); delay(1500); // запоминаем угол после падения и сопоставляем его с // предыдущим int hitAngle = realAngle(); if (hitAngle == lastHitAngle) ++hitAngleMatches; else { lastHitAngle = hitAngle; hitAngleMatches = 0; } // если угол не менялся 5 раз — мы закончили if (hitAngleMatches >= 5) jobDone = true; } Включаем, пробуем, работает! Что делать с полученным опытом — вариантов много: можно сделать контроллер вроде того, что используется на кораблях для установки тяги (полный вперёд / полный назад); можно использовать серву с обратной связью как элемент автономного рулевого управления какой-нибудь машины; можно много всего. Да прибудет со всеми нами фантазия!
Всем привет!Ну чтож, начнем. И первый пост будет про один из основных робототехнических приводов -сервопривод и про то как его сделать.Второй же тип привода — пневмомускулу, уже рассмотрели вот тут Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Сервопривод получает на вход значение управляющего параметра. Например, угол поворота.
Блок управления сравнивает это значение со значением на своём датчике.
Наиболее распространены сервоприводы, которые удерживают заданный угол, и сервоприводы, поддерживающие заданную скорость вращения.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.

В качестве мотор-редуктора в нашем самодельном серве используется обычный мотор от электростеклоподъёмников. Опробованы и российские и китайские модели. Подходят все, имеющие стандартное крепление. Этот редуктор дешевый и дает огромный момент.

или же собранный

Хотя скорее подходят все имеющие возможность всверлиться в выходную ось вращения для установки энкодера.
Силовой драйвер — самая сложная и напряженная часть сервопривода.
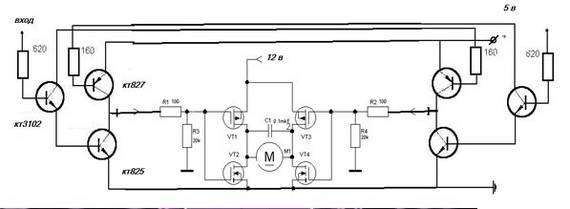
Драйвер был трижды полностью переработан. В первой версии сервопривода использовался драйвер на Н-мосте биполярных транзисторов (кт827 и кт825).
Этот драйвер работал, но очень короткий срок (менее минуты). Далее наступал перегрев. Для более слабых моторов пойдет, но для мощных стеклоподъемников нет. Применения теплоотводов было невозможно, т.к. это значительно увеличивало массогабариты. А это один из основных параметров. Масса и размеры сервопривода должны быть минимальны. Во второй версии была попытка использовать Н-мост на силовых полевых транзисторах (irp9140n и irfz44n) .. Драйвер не заработал совсем, несмотря на все усилия. Причина была в слишком низком напряжении на выходе микроконтроллера управления.
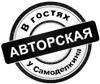
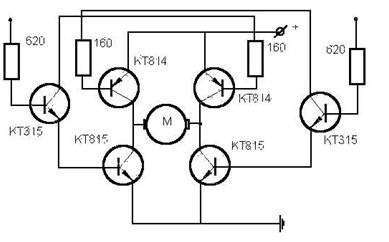
Требовалось увеличить напряжения до 12 в, с сохранением возможности ШИМ. В третей версии драйвера были устранены все недостатки предыдущих моделей драйвера. Драйвер в этой модели представляет собой два Н-моста , внутренний мост на полевых транзисторах и внешний мост на биполярных. . Нагрев транзисторов во время испытания был минимален и поэтому теплоотвод был уже не нужен. Внешний мост увеличивал напряжения до необходимого, а внутренний нужен был для силового управления мотором. Схема для удобства была разделена на две части.
Энкодер представляет собой обычный переменный резистор на 5ком.Особых требований к нему нет. Единственное условие кроме сопротивление является то ,чтобы выходной вал бегунка был 6 мм в диаметре. Он всверливается в выходную шестеренку мотора и позволяет определить текущий угол.

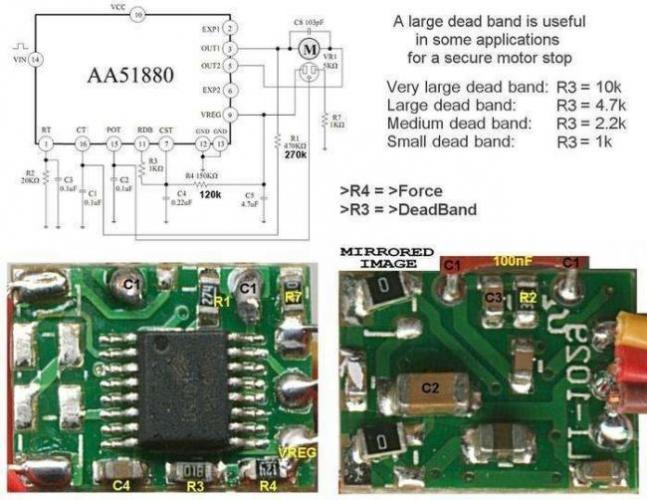
Микроконтроллер представляет собой электронную начинку от маломощных китайских микросервоприводов. Если просто — берем самую дешевую серву и выдираем оттуда мелкую плату. Это и есть мозги и контролер нашей сервы.
Выходы этого контролера, те что шли на мотор, надо подключить к входам H моста. А выходу моста уже к мотор-редуктору.
Такая конструкция сервопривода показала себя очень хорошо и будет дальше улучшаться и использоваться .
9Используемые источники:
- https://fb.ru/article/210945/servoprivod—chto-eto-kak-sdelat-i-podklyuchit-servoprivod-svoimi-rukami
- https://habr.com/post/127773/
- https://pikabu.ru/story/samodelnyiy_servoprivod_6974731

 Учебно-тренировочный радиоуправляемый самолет своими руками. — Паркфлаер
Учебно-тренировочный радиоуправляемый самолет своими руками. — Паркфлаер Программатор Громова. Микроконтроллеры для начинающих
Программатор Громова. Микроконтроллеры для начинающих Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress
Видео и фото обзор стартового набора Arduino для UNO R3 из посылки на Aliexpress