Добрый день, Уважаемые читатели!
Вот и пришло время переделки моего 3D принтера. На этот раз я буду полностью его пересобирать и менять все пластиковые детали задействованные в механике на металлические.
Наверно у читателей возникнет вопрос: «А, зачем менять?»
Мой ответ будет прост: Я очень разочаровался в пластике в целом. Он мягкий, плохо справляется с нагрузками и тяжело переносит повышенную/высокую температуру, и совершенно не держит резьбу. Как материал для прототипирования он неплох, но для чего то важного и сложного он не подходит.
Проект этого принтера тянется уже давно, так время от времени я сталкиваюсь со сложностями, в виде длительной доставки запчастей и прочих семейных обстоятельств. И так приступим.
Корпус – рама
Для сборки рамы принтера нам понадобятся:
- Профиль 30х30 длинной 320 мм в количестве 13 шт. и длинной 500 мм, который я приобретал в компании «Собери-Завод» в г. Москва. При заказе была осуществлена резка профиля;
- Шпилька строительная М6 длинной 330 мм – 8 шт., 520 мм – 4 шт.;
- Уголок силуминовый – 26 шт.;
- Самодельные сухари М6 – 42 шт.;
- Самодельные кубики из пластика– 8 шт.;
- Гайки М6 с пластиковой вставкой – 42 шт.

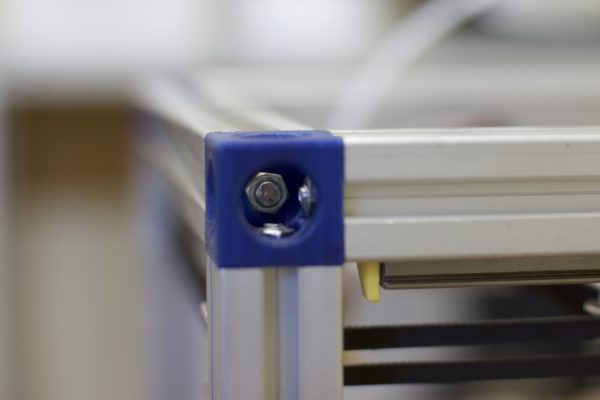
Собираем корпус, соблюдая строгую геометрию при помощи ровного строительного уголка. Везде должно быть строго 90 градусов.
Для соединения вершин, мною были распечатаны 8 кубических креплений (синий цвет).
 На 3D-принтере научились печатать стекла разных составов
На 3D-принтере научились печатать стекла разных составовДля более жесткого соединения сквозь профиль была пропущена шпилька М6.

Все перекрестные соединения были осуществлены при помощи силуминовых уголков и сухарей М6. Они придают хорошую жесткость корпусу.
Кинематика принтера (механика оси X и Y)
Кинематика моего принтера будет собрана по схеме CoreXY, в теорию вдаваться мы не будем, если у Вас есть желание, то с ней предлагаю ознакомиться по ссылке.
Еще можно ознакомиться с моим видео, в котором показано, каким образом происходит движение головки, за счет одновременного вращения моторов X и Y.
Схема расположения элементов кинематики (без профиля).
Для сборки механики нам понадобятся:
- рельсы MGN12 длинной 300 мм с каретками MGN12С – 3 шт.;
- ремень GT2 длинной 4 м;
- зубчатые колеса на подшипниках GT20 – 8 шт.;
- шкивы GT20 на шаговые двигатели – 2 шт.;
- самодельный крепеж для двигателей – 2 шт.;
- болты М5 – 6 шт.
- самодельная головка из профиля;
- самодельная пластина портала размером 36х377х2 мм.
- крепление хотэнда SK-16;
- самодельные сухари М6 длинной 150 мм – 2 шт.;
- болты и гайки М3 – около 20 шт.
Крепление рельс к профилю осуществляем при помощи длинного самодельного сухаря с вставленными гайками М3 с пластиковым фиксатором.
Собираем голову по схеме. В пластиковой части предусмотрены шестигранные отверстия для гаек с пластиковыми вставками.
 3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать
3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробоватьРезультат сборки, болты М3 и М5 с внутренним шестигранником.
Крепление SK16 жестко крепит радиатор и позволяет ему проворачиваться и еще неплохо передает тепло от него на каретку.
Выполняем монтаж зубчатых колес на портал.
Крепим портал на две каретки оси X.
После монтажа проверяем плавность движения и параллельность.
Выполняем монтаж шаговых двигателей при помощи самодельных креплений и сухарей.
Изготовление креплений производилось кустарным способом на балконе, при помощи дрели и сверла, на коленках.
Крепим зубчатые колеса на самодельные крепления из дюралюминиевого уголка.
Ремень устанавливаем по следующей схеме (двухэтажная без перекрещивания). Концы ремня заводим в головку принтера, одинаково натягиваем и фиксируем.
 Обзор Creality Ender 5: лучший 3D-принтер менее $ 500
Обзор Creality Ender 5: лучший 3D-принтер менее $ 500После крепления рельс проверяем геометрию и совершаем пробные движения.
Очень важно добиться одинакового натяга ремней. Фиксируем ремень болтами М3 в головке.
Ось Z
- Самодельный фанерный стол;
- Валы диаметром 12 мм, длинной 400 мм – 2 шт.;
- Крепление валов SK12 – 4 шт.;
- Крепление ШВП SK16 – 2 шт.;
- Подшипники скольжения LMK12LUU – 2 шт.;
- ШВП 1204 [SFU 1204 ] с обработанными концами, длинной 320 мм;
- Подшипники 8х16х5 мм – 2 шт.;
- Муфта 5х8 мм.
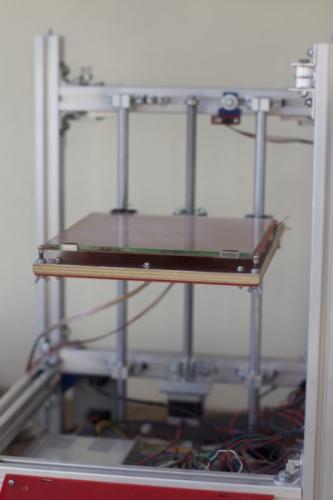
Крепим гайку ШВП вместе с валом ШВП и подшипники LMK12LUU на стол при помощи болтов и гаек М3.
Для быстрого нахождению центров отверстий и соблюдения геометрии мной был смоделирован и распечатан адаптер.
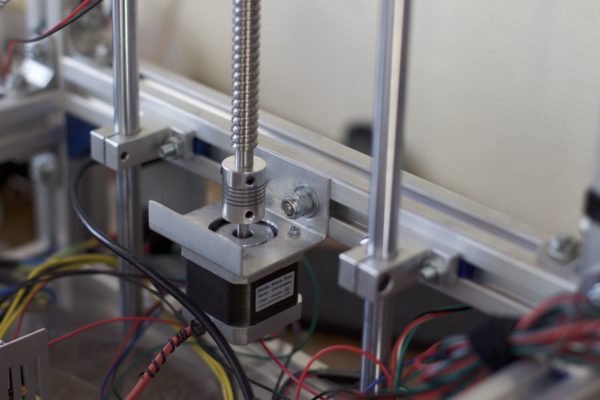
Собираем все оставшиеся элементы согласно графической схемы, закрепляем их на профиле при помощи сухарей (для удобства стол на схеме скрыт).
Для крепления валов диаметром 12 мм были применены крепления SK12, подшипники ШВП устанавливаются в крепления SK16 (оранжевые крепления на схеме). Проблема заключается в том, что у креплений SK12 и SK16 разные размеры и центра не совпадают. Необходимо было обработать крепление, укоротить основание на 4 мм на фрезерном станке. Для соосности моим знакомым Станиславом (очень хорошим человеком, который так же как и я, увлечен станками ЧПУ) был выточен вал 12/16 мм.
После обработки оси совпали, можно монтировать.
И так, механика собрана и готова к движению.
Электроника
Электроника для принтера будет основана на классической связке Arduino+Ramps.
- Arduino MEGA 2560;
- Ramps 1.4 (комплект);
- Драйвера DRV8825 – 4 шт.;
- ЖК Экран 2004;
- Кардридер;
- Шаговые двигатели 42BYGHW609 Nema17 – 4 шт.;
- Нагревательный стол MK2;
- Блок питания 12В – 360 Ватт, 30А;
- Экструдер – MK8;
- ХотЭнд E3D V6 – оригинал (копия);
- Концевики оптические – 3 шт.
Подключения производятся по классической схеме.
Монтируем и подключаем оптические концевые выключатели.
Ось Y
Ось X
Ось Z
Закрепляем экструдер MK8 на раму принтера.
Прошивка
Прошивка принтера MARLIN 1.0.2 со стандартными настройками.
Я приведу краткий список своих параметров:
Активируем кинематику
#define COREXY
Активируем оптические концевики
const bool X_MIN_ENDSTOP_INVERTING = false;
const bool Y_MIN_ENDSTOP_INVERTING = false;
const bool Z_MIN_ENDSTOP_INVERTING = false;
Указываем направление вращение двигателей
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR false
#define INVERT_E0_DIR true
Указываем габариты рабочего поля
#define X_MAX_POS 200
#define X_MIN_POS 0
#define Y_MAX_POS 200
#define Y_MIN_POS 0
#define Z_MAX_POS 250
#define Z_MIN_POS 0
Указываем скорость перемещения при команде Home
#define HOMING_FEEDRATE {2000, 2000, 500, 0}
Указываем шаги
#define DEFAULT_AXIS_STEPS_PER_UNIT {160, 160, 1600, 301}
#define DEFAULT_MAX_FEEDRATE {50, 50, 10, 25}
#define DEFAULT_MAX_ACCELERATION {5000, 5000, 250, 10000}
Область печати составляет 200х200х250 мм.
Настройки слайсера
Сопло – 0,4 мм;
Высота слоя – 0,15-0,2 мм;
Толщина стенки – 1,2 мм;
Толщина дна детали – 0,6 мм;
Высота крыши детали – 0,6 мм;
Скорость печати – 50-100 мм *;
Толщина пластика – 1,75 мм;
Текучесть – 100-120% *;
Температура сопла – 210-230 градусов *;
Температура стола – 60-65 градусов.
* – подбор параметров производится опытным путем, зависит от пластика и производителя.
Результат печати
Плюсы и минусы
Плюсы:
Рамы из профиля является жесткой и универсальной, в любой момент можно без проблем что-то переделать/передвинуть.
Кинематика CoreXY имеет ряд преимуществ, к ним относятся:
- высокая скорость печати за счет более легкого портала;
- большее количество ремней, дает большую прочность (в сравнении с h-bot);
- меньшая длина ремня не дает такого резонанса при движении как h-bot;
- движение стола происходит вверх и вниз, деталь во время печати не раскачивается;
- имеются большие угловые ускорения (в сравнении с h-bot);
- установка ШВП избавила от люфтов и волн на детали при печати;
- установка рельс избавляет от прогиба валов;
- применение зубчатых колес сохраняет целостность зубов на ремне.
Минусы:
- Минусы, профиль довольно толстый и увеличивает габариты принтера;
- Рельсы очень шумно работают при быстром перемещении;
- Ремень тянется и видны мелкие вибрации ремня (колебания) при движении, это негативно сказывается на качестве печати;
- Ремня 2 куска, и их необходимо натянуть с одинаковым усилием;
- Со временем необходимо выполнять натяжку ремня;
- Что бы выполнить монтаж какой-нибудь детали на корпусе принтера, необходим сухарь (специальный болт/гайка), возможно придется делать частичный разбор принтера.
Советы новичкам
- Старайтесь делать корпус как можно жёстче, желательно из металла (жесткости много не бывает, вес принтера положительно сказывается на качестве печати);
- Минимизируйте использование пластиковых деталей, пластик очень ненадежный материал;
- Максимально облегчайте головку принтера, инерция меньше, качество и скорость печати выше;
- По возможности используйте белый ремень GT2, он армированный и менее тягучий;
- Вместо роликов используйте зубчатые колеса, так как они сохраняют геометрию зуба на ремне.
Благодарю Вас за внимание!
Пользуясь случаем хотел поблагодарить Станислава за оказанную помощь. У этого хорошего человека есть свой канал на Youtube.
Администрацию портала прошу принять данный пост на конкурс.
Метки: CoreXY, конкурс #3   2017-02-13      Раздел: На конкурс, Постройка 3D принтера, Своими руками  
- Цена: около 20 тысяч за 3Д принтер
Подшипник 608 (22 x 8 x 7 мм) Блок hotend Набор сопел для печати (10 шт) E3D V6 термобарьер с тефлон. Трубкой/ 1.75 мм Радиатор ZAV Алюминий блок для E3D V6 16 x 16 x 12 мм Экструдер Шестерня MK8 подачи прутка Миниатюрный подшипник 623zz 3 x 10 x 4 мм Пружина прижима подшипника к подаче 1.2 мм x 20 мм Тефлоновая трубка под 1,75 мм с двумя фитингамиПрочее Пружина диаметр 4.8 мм длина 8 мм Утеплитель Скотч алюминиевый Каптоновый скотч Теплопроводный клейЭлектрическая часть
- Шаговые двигатели Nema 17 42
- Плата MKS gen 1.4
- Плата MKS Sbase 32bit
- Драйвер шагового двигателя A4988
- Драйвер шагового двигателя Drv8825
- Экран 12864 (128×64 точек)
- Модуль энкодера для arduino KY-040
- Считыватель для SD карты
- Вентилятор 50x50x10 12 v 2 pin
- Вентилятор 40x40x15 12 v 2 pin
- Стол MK2B размер 300×200
- Нагреватель hotend 12V 40W длина 20 мм
- Микропереключатель для Makerbot MK7 / MK8
- Микропереключатель KW4-3Z-3
- Термистор 100 К ом NTC 3950
- Набор проводов 14 шт
- Трубка изоляции
- Провод 2 жильный сечением от 1.5 мм2 длина метр
- Разьем IEC320 220 V
- Блок питания 12v от 360 W
Примерная стоимость комплекта деталей $210. С Sbase и MKS-TFT будет подороже. Итоговая стоимость принтера 20 000р, если покупать все по списку. В целом получается неплохой принтер, дешевле, чем брать готовый комплект (это около 28тысяч) Итак, часть комплектующих на месте. Винт, валы, подшипники и некоторые другие запчасти были вот в этом обзоре. Поэтому дублирую под спойлерВалы на 12 мм (указанные в заглавной ссылке в обзоре). Брал для ZAV 3D.Вал 12х400Вал 12х500 Приходят упакованные каждый в запаянный пакет, зачем то положили наклейки бангууда. Будут установлены в корпус ZAV 3DСуппорты-фланца для крепления валов от SHF8 до SHF20Линейные подшипники 12 мм LM12UU Ходовой винт Т8 (Lead Screw T8, гайка T8 Nut) Подробно рассматривал в своем обзоре Kirich, винт с многозаходной резьбой. Лучше брать сразу с гайкой. Если пилить, то дополнительно надо будет прикупить еще латунных гаекНа 100 ммНа 200 мм (обращайте внимание, какой склад в магазине выбираете, цена разная).На 250 ммНа 400 ммЛот с выбором Т8 от 100 до 600 мм Обычно беру больше, плюс одну гайку. Режу в размер, остаток идет еще куда-либоФланец-подшипник KFL08 для крепления винта Т8 на торцевую поверхность (Flange Bearing KFL08)Комплект фанерного корпуса также на месте. Под спойлером описание комплектаКомплект для сборки







Что было не так
Что было не так c предыдущим принтером:
- Шум — заглушал телевизор
- Размеры — 40x30x80 на стол не поставить (не влез даже на балкон, точнее влез но катушка с пластиком уже не влазила)
- Вес — 8кг (частично из за Nema23 и тяжелых мебельных щитов)
Что мне хотелось
Шум — убрать шум на минимум (в идеале только звук шаговиков в 32 микрошаговом режиме). Один из самых громких источников шума в дельта механике это линейные направляющих и линейные подшипники, в природе лечится рельсовыми направляющими или нехитрой конструкцией с алюминиевым профилем и подшипников скольжения одетыми в оболочку (Kossel). Как по мне, в вертикальном состоянии линейные подшипники и линейные направляющие работают не в правильном режиме.Размеры — хочется принтер который легко умещается на стол с творческим беспорядком. Далее — размер печатной области должен быть не меньше чем 10x10x10+. Почему я решил пожертвовать размерами печатной области — а потому что за полгода почти каждодневной печати мне не разу не понадобилось напечатать что то больше, чем 10×10. Я принял решение что мне этой области хватит с головой и даже останется. Также, на прогрев области 10×10 надо в 4 раза меньше мощности блока питания, а это позволяет использовать обычные внешние блоки питания — я влез всего в 60ватт (с подогреваемой платформой), у меня 8.5A 12v. Большим плюсом является внешний блок питания, который лежит под столом и не занимает место.Вес — предыдущий параметр уже позволяет серьезно уменьшить вес, плюс укороченные Nema17 (меньший момент, но это не проблема). Cтруктурная сложность для небольших конструкций достигается легче и легкими материалами.
Механики которые я рассматривал
XY Gantry Не подходила по размерам — шаговик + каретка по одной оси это минимум 10+ сантиметров пространства, структурная стабильность также вызывала сомнения. Линейные подшипники должны быть разнесены (на мой взгляд ~7-9 сантиметров не используемого пространства.HBot and CoreXY Размер чуть меньше чем в предыдущем варианте. Структурная стабильность тут тоже также вызывала сомнения, плюс добавляется сложность с созданием перекосо-устойчивости (для данной механики это очень важно) так и с равномерным натягом ремня.Delta Один у меня уже был, но даже в уменьшенном виде размеры меня бы не устроили — три Nema17 длиной 71мм (47+24) ориентированные под 60 градусов и 10×10см рабочая область явно превышали 20 сантиметров в диаметре.Articulated arm Это моя мечта — но явно есть технические сложности с geabox без люфтов — пробовал печатать многие типы и всеми остался недоволен — последняя надежда на Harmonic drive (именно такой тип используется в промышленном оборудовании)Polar Тоже интерсная механика, даже проделал небольшую работу(на самом деле не то чтобы чистая полярная, в интернете встречал название «биполярная»), но отложил на будущее. В основном из за того что была найдена механика которая показалась мне несколько более перспективней. Из минусов полярной — сложность масштабирования, дополнительные затраты на передачу сигналов на вращающуюся платформу, структурная сложность одной из «оси».SCARA Вот на этом и остановился, точнее на варианте который в интернете имеет название — 5 bar parallel robot (хотя в википедии он описан в SCARA). Тут меня устроило все:
- Вес
- Размер
- Шум
- Масштабирование — изменил длину рычагов и размер платформы и вот мы имеем большую область печати
- Возможность использовать aliexpress-стандартные детали
- Структурная сложность выглядела достижимой
- И хотелось чего то футуристического
Разработка
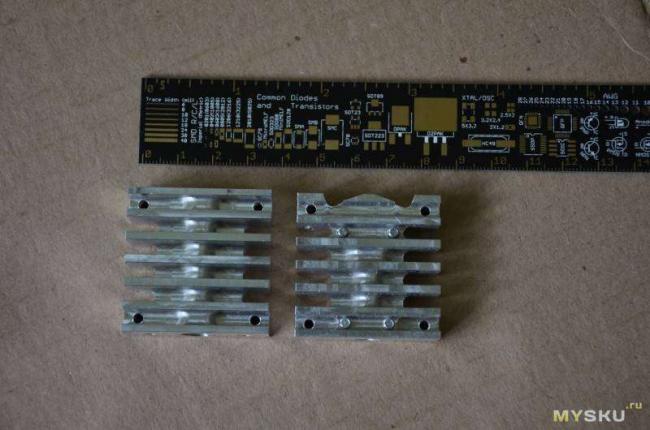
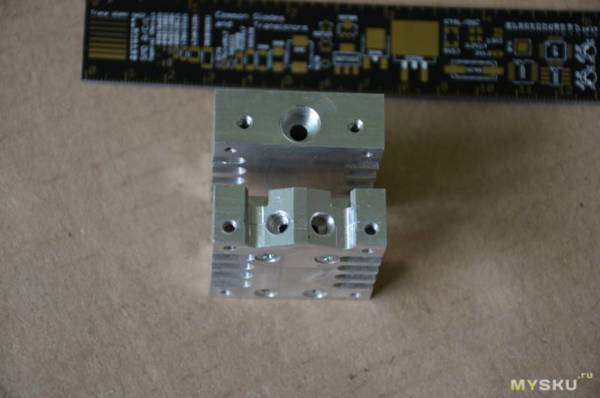
Вооружившись OpenScad я начал разработку. Вся разработка opensource и найти её можно на github.com/pavlog/sscara Далее я опишу ключевые моменты данной механики и выскажу свои мысли почему было сделано именно так или почему так делать не надо.Редуктор Самое важное в любом принтере это точность печати. Расчетная длина рычагов у меня получалось 150см — а это давало на максимальном радиусе длину хорды в 4.712мм (без микро шага, для 1.8deg шаговика). При использовании микро шага 32 (DRV драйверы позволяют это сделать) получалось уже 0.147мм, что в принципе еще нельзя назвать достаточным для хоббийного принтера (я считаю что максимум это 0.1mm. Также внушало опасение, что потеря крутящего момента шаговика на таком микро шаге будет приводить к проблемам. Было решено что оси будут крутится не напрямую, а через редуктор. Перепробовал очень большое количество всяких схем и типов — все не подошло — в основном из-за люфтов, либо шансов на появления люфтов из за износа. Как оказалось — чем проще, тем лучше. А самым простым вариантом оказалась ременная передача. Просто и без люфтов. Выбрав передаточное отношение 1 к 5 (и 32 микро шаг) у меня получилось худшая точность позиционирования равная 0.029мм (чего более чем достаточно). РычагиSCARA может иметь как два рычага так и 4. От схемы с двумя отказался сразу — вешать шаговик на вынос это неправильное решение (в таких решениях используются двигатели постоянно вращения с энкодерами, также жесткость явно не для пластика). А вот четырех рычаговая система выглядела достижимой и не очень сложной. Как выглядело сначала
РычагиSCARA может иметь как два рычага так и 4. От схемы с двумя отказался сразу — вешать шаговик на вынос это неправильное решение (в таких решениях используются двигатели постоянно вращения с энкодерами, также жесткость явно не для пластика). А вот четырех рычаговая система выглядела достижимой и не очень сложной. Как выглядело сначала 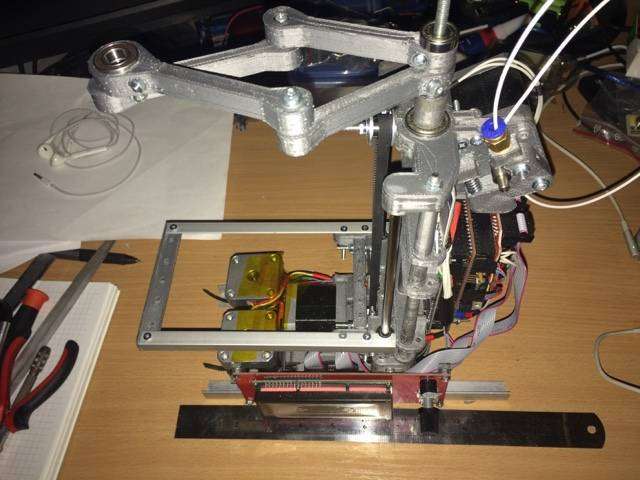 Хот енд
Хот енд Экструдер пришлось переделать — вариант с пружинкой(на две фотографии выше) хоть и прикольно смотрится, но явно не работает (не хватает прижимной силы), использовал стандартную схему.
Экструдер пришлось переделать — вариант с пружинкой(на две фотографии выше) хоть и прикольно смотрится, но явно не работает (не хватает прижимной силы), использовал стандартную схему.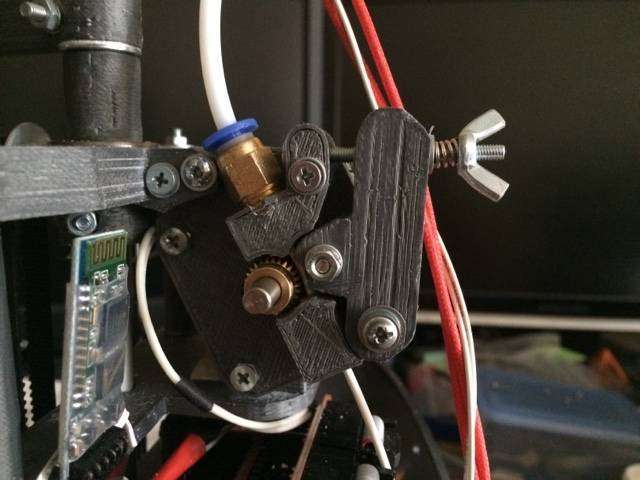 Собрав данную конструкцию и приступив к тестирования сразу стало понятно что Хот энд из PTFE (фторопласт) жить долго не может — рано или поздно его выдавливает из нагревательного блока, осложнялось это еще и тем, что 10мм отверстие, где соединялись рычаги не подходило к стандартным китайским экструдерам. Придумывая все более и более замысловатые экструдеры, я понял, что это путь в никуда. Решил решать задачу не силойб а умом, а именно — подходить должен любой экструдер, который можно купить, значит должна быть планка крепления экструдера любой формы. Добавил небольшое ответвление от одного из рычагов и повернув его на десяток градусов — проблема решилась, но пришлось еще немного модифицировать прошивку (прошивка в директории Software/Marlin). Как получилось
Собрав данную конструкцию и приступив к тестирования сразу стало понятно что Хот энд из PTFE (фторопласт) жить долго не может — рано или поздно его выдавливает из нагревательного блока, осложнялось это еще и тем, что 10мм отверстие, где соединялись рычаги не подходило к стандартным китайским экструдерам. Придумывая все более и более замысловатые экструдеры, я понял, что это путь в никуда. Решил решать задачу не силойб а умом, а именно — подходить должен любой экструдер, который можно купить, значит должна быть планка крепления экструдера любой формы. Добавил небольшое ответвление от одного из рычагов и повернув его на десяток градусов — проблема решилась, но пришлось еще немного модифицировать прошивку (прошивка в директории Software/Marlin). Как получилось Прикрутил аналог E3DV5 — и все заработало. В процессе калибровки выяснилось, что толщины рычага явно не хватало, они прогибались — был утолщен рычаг, а для силовых рычагов были сделаны двойные рычаги с возможностью регулировки натяжения. Двойные рычаги
Прикрутил аналог E3DV5 — и все заработало. В процессе калибровки выяснилось, что толщины рычага явно не хватало, они прогибались — был утолщен рычаг, а для силовых рычагов были сделаны двойные рычаги с возможностью регулировки натяжения. Двойные рычаги И настройка натяжения
И настройка натяжения Z Ocь Самое грустная часть повествования. Тут я допустил все ошибки, которые можно было допустить. Основная — это использования одного линейного подшипника на каждую линейную направляющую. Правильно — по два на каждую. Ну и в общем, ось z немного болтается — но так как платформа связана с осями рычагов — то болтаются они как одно целое и болтание не дает проблем. Ось Z это то, что надо переделывать полностью. В процессе эксплуатации вылез z wobbling. 4 линейных подшипника и система натяжения ремня должны помочь. Крепление должно быть модульное — сейчас, чтобы добавить или улучшить что то, надо разбирать пол верхней части.Электроника Ramps 1.4+DVR8825+HC05 уже зарекомендовавший себя тандем (вот только ардуиновский регулятор на 5в явно слабый — был заменен на lm7805). LCD модуль — RepRapDiscount Smart Controller — грустно, но все репраповские модули очень большого размера и их втискивание — самое большая сложность дизайна (c учетом того, что все что есть можно было уместить в 1.5 раза меньшую площадь). Блок питания — внешний с разъемом DC Jack — 12v 8.5A. Потребления больше 60 ватт зарегистрировать не получилось (это с нагреваемым столом). Подогреваемый стол — 12x12cm. На алюминиевую пластину, с помощью каптонового скотча, было приклеено 80cm 0.4 нихрома и накрыто 4мм стеклом. За 5 минут нагрева дают ~95 градусов (по показаниям термистора). Этих градусов и обезжиривания достаточно, чтобы печатать ABS (на видео была температура 60 и сахарный сироп, сейчас просто спиртом протираю перед печатью). Рядом с 13″ Macbook.
Z Ocь Самое грустная часть повествования. Тут я допустил все ошибки, которые можно было допустить. Основная — это использования одного линейного подшипника на каждую линейную направляющую. Правильно — по два на каждую. Ну и в общем, ось z немного болтается — но так как платформа связана с осями рычагов — то болтаются они как одно целое и болтание не дает проблем. Ось Z это то, что надо переделывать полностью. В процессе эксплуатации вылез z wobbling. 4 линейных подшипника и система натяжения ремня должны помочь. Крепление должно быть модульное — сейчас, чтобы добавить или улучшить что то, надо разбирать пол верхней части.Электроника Ramps 1.4+DVR8825+HC05 уже зарекомендовавший себя тандем (вот только ардуиновский регулятор на 5в явно слабый — был заменен на lm7805). LCD модуль — RepRapDiscount Smart Controller — грустно, но все репраповские модули очень большого размера и их втискивание — самое большая сложность дизайна (c учетом того, что все что есть можно было уместить в 1.5 раза меньшую площадь). Блок питания — внешний с разъемом DC Jack — 12v 8.5A. Потребления больше 60 ватт зарегистрировать не получилось (это с нагреваемым столом). Подогреваемый стол — 12x12cm. На алюминиевую пластину, с помощью каптонового скотча, было приклеено 80cm 0.4 нихрома и накрыто 4мм стеклом. За 5 минут нагрева дают ~95 градусов (по показаниям термистора). Этих градусов и обезжиривания достаточно, чтобы печатать ABS (на видео была температура 60 и сахарный сироп, сейчас просто спиртом протираю перед печатью). Рядом с 13″ Macbook.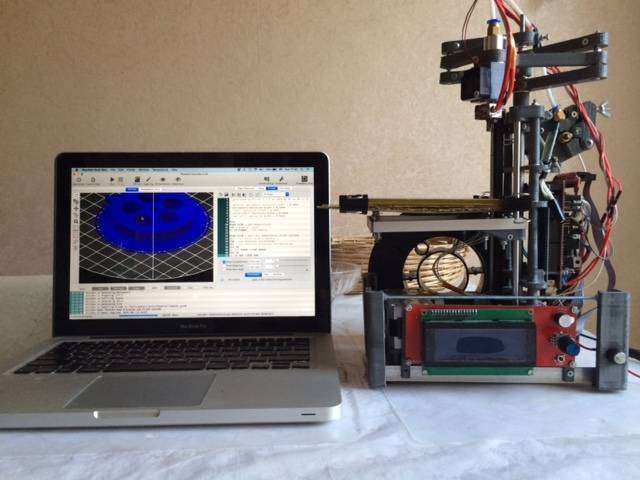 Прошивка и исходники Все на GitHub. Модифицированный Marlin в директории Software/Marlin)
Прошивка и исходники Все на GitHub. Модифицированный Marlin в директории Software/Marlin)
Что надо переделать/улучшить
- Ось Z
- Передаточное число (думаю 6-9 максимум)
- Ремень крепить прямо к большим шестерням, и вывернутым на изнанку
- Модульность
- Немного жесткости
- Уменьшить размер — но сохранить параметры рабочей области
- Уменьшить вес — чуть тоньше Nema17 (-1см)
Цена
51$ — 5 Nema17 (1 про запас останется) 32$ — Ramps 1.4+5 Dvr8825+LCD (1 drv8825 остается про запас) 7$ — E3DV5(китайский) под боуден, c метровой трубкой (пол метра останется про запас) 2$ — шестерня для экструдера 6$ — шестерни для gt2 ремня и gt2 ремень 5$ — 6мм направляющие (2×20см) и 12 линейных подшипников (а надо 4) ~8$ — подшипники качения+нихром+крепеж+алюминиевые уголки+мелочевка 10$ внешний блок питания 8.5A 12VИтого: 120$ (с учетом блока питания, но без учета пластика для печати — ориентировочно ~200 грамм) P.S. Не просите примеров печати — Z wobbling портит всю картинку (по XY все очень качественно) — когда закончу v2 сделаю обзорный тест качества (и возможно даже сравню с M3D). V1 — это Proof of Work. P.S.2 До сих пор не получил свой M3D.Используемые источники:
- https://3deshnik.ru/blogs/xedos/sborka-printera-corexy-iz-alyuminievogo-profilya
- https://mysku.ru/blog/china-stores/52683.html
- https://habr.com/post/382171/

 Самый самый самый 3D принтер (дельта)
Самый самый самый 3D принтер (дельта) 3d принтер RepRap Prusa i3 — плюсы и минусы
3d принтер RepRap Prusa i3 — плюсы и минусы Тест Anet A6 - опыт и улучшения
Тест Anet A6 - опыт и улучшения Настенный принтер — от идеи к реализации
Настенный принтер — от идеи к реализации