- Цена: $17.19 (с купоном $15.47)
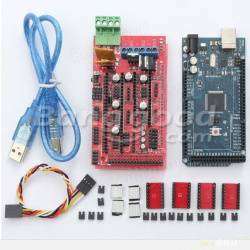
Приветствую всех посетителей сайта Mysku.ru! И хочу поделиться небольшим рассказом о комплекте электроники для модернизации небольшого самодельного станка CNC с возможностями фрезера и гравера. Будет замена платы управления UNO+CNC Shield на комплект Arduino Mega2560+RAMPS. Данный комплект приобретался с прицелом на увеличение функционала и возможностей для небольшого настольного ЧПУ гравера/фрезера. Штатный комплект предусматривал контроль по 3 осям и работу от управляющего компьютера/планшета. Новый кит электроники позволяет автономную работать с SD карты, а также дает большие возможности для модификации прошивки: подключение лазерного выжигателя, дополнительной поворотной оси, подключения выходов на вентиляторы или фильтр-пылесос. Предусматривается также установка дисплея для управления непосредственно, выбора файла с флешки, паузы и так далее. Долго присматривался к различным платам управления, но оптимально вышел кит Arduino Mega2560+RAMPS. Ну и драйверы в комплекте. Экран докупал отдельно вот такой. Теперь по порядку. Выбирал вот этот кит, плюс дисплей. Краткое описание комплекта: RAMPS 1.4 + Mega2560 R3+ A4988 Kit
- Arduino Mega2560
- Ramps 1.4
- 4xA4988 драйверы плюс небольшой радиатор без скотча.
- Шнур 4pin, шнур USB А <-> USB-B
Посылка пришла в простом пакете, но каждая плата была упакована отдельно в антистатический пакет. На ножках выводных элементов присутствовал защитный кусок пеноматериала. Фотоотчет о посылке Arduino Mega2560
Arduino Mega2560 Размеры и масса. Возможно заинтересует тех, кто готов разработать под них свой корпус. Основные микросхемы: ATMEGA2560 версия 16AU,
Размеры и масса. Возможно заинтересует тех, кто готов разработать под них свой корпус. Основные микросхемы: ATMEGA2560 версия 16AU, понижайка LM358 (в комментариях robosku верно подметил, что это сдвоенный операционный усилитель), интерфейс CH340G. Обратите внимание на китайскую версию USB-Serial чипа. Ramps 1.4. Это по сути большой и дешёвый Mega Pololu Shield. Можно подключать до 5 драйверов двигателей, силовую нагрузку, есть много OI выходов, а также ШИМ и последовательные интерфейсы, например, для дисплея или внешней карты памяти. Все в отдельном пакете. Присутствует ответная часть силового разъема Аналогично размеры. 4xA4988 драйверы Еще фото. Радиаторы без скотча. Нужно устанавливать на термоклей или термопасту. Правильное ориентирование A4988 при установке — резистором в сторону ОТ силового разъема. Как на картинке. Итак, вот собственно для чего все это покупалось. Вот так выглядят комплектующие для сборки и обозреваемый апгрейд-кит для самодельного станка-фрезера. Здесь на Mysku несколько раз проскакивали публикации про самодельный станок-фрезер из фанеры. Достаточно простой конструкции, с использованием проверенной временем компоновки. Станок имеет рабочее поле 180х200х150 мм, и управляющую плату Arduino UNO + CNC Shield. Со своими обязанностями UNO с прошивкой GRBL справляется, но хотелось чего то большего)))). Это весьма бюджетный фанерный станок-фрезер для простых операций (гравировка, фрезеровка мягких материалов, изготовление печатных плат). Я задумал некоторую модернизацию станка, в первую очередь – это установка экрана управления и с возможностью автономной работы (с флешки). До настоящего времени использовался старый ноутбук или планшет с Windows. Соответственно, смена платы управления повлечет замену прошивки на Marlin/Repieter. Эти прошивки умеют и CNC и лазерное выжигание с ТТЛ. На самом деле я должен отметить, что существует прошивка GRBL для MEGA2560. Но это, как говорится, на любителя. Во вторую очередь – нужно было обеспечить модернизационный потенциал – дополнительные входы и выходы для подключения периферии (ТТЛ для лазера, обдув, подсветка, кнопки управления гравером, прицел на WI-FI и удаленный доступ с вебкой). Вот краткое описание комплектующих и основных этапов сборки. Потребуются фанерные детали корпуса (резка фанеры по чертежам лазером), клей для сборки, а также ходовые винты Т8, гайки к ним, направляющие валы и подшипники (8 и 6 мм), ну и по мелочи — крепеж, хомуты и прочее. Процесс сборки не сложный. Сначала собирается корпус и оси XY, затем отдельно собирается ось Z, каретка и крепление для фрезера. Сначала собираем корпус. Для сборки используется клей (столярный, ПВА, или другой удобный) Обратите внимание на правильность установки несущих конструкций. Диагональ можно перепроверить линейкой, угольником — перпендикулярность стенок. Далее устанавливаются направляющие валы. Отдельно соберем ось Z с креплением фрезера. И каретку Y. Далее фото из разряда «как нарисовать сову». Промежуточных подробных фото, с сожалению пока нет. Станочек бюджетный, двигатели из серии «я тебя слепила из того, что было». Двигатели Nema17 устанавливаются через переходник типа такого. На днях допечатаю адаптеры на 3Д принтере, затем установлю новые Nema17.Дополнительная информация — сравнение со стоимостью станка от МастеркитВот такой станочек попался мне. Конструктор Мастер-Кит 3-х осевой фрезерный станок с ЧПУ — 24000 рублей А функционал — тот же. Несколько слов про прошивку. Можно настроить с нуля Марлин/Repetier, можно найти готовую сборку. Вот, например, Marlin. При настройке обратите внимание на вот этот код: В прошивке надо будет указать тип «бутерброда» — матплату Мега2560+RAMPS1.4, так как экструдеров у нас нет, то выбираем вот такой вариант: и далее В зависимости от сборки Марлина, эта же настройка может выглядеть по другому: Если не требуется слежение за температурой, то отключаем датчики тоже — прописываем «0» Прописываем размеры рабочей зоны, расположение концевиков и точки HOME, ускорения, скорости перемещения и прочее. Ну и так далее, методом проб и ошибок настраиваем свою конфигурацию. Скажу только. что в Repitier больше заложено возможностей для CNC/Laser конфигурации. Заходим в онлайн-тулзу Repetier-Firmware configuration tool и начинаем настраивать. После настройки основных параметров (длина/ширина и т.д.), необходимо выбрать «специальные» функции — для лазера или фрезера. Вот например есть такой код Пин ТТЛ управления лазером подключается к пину 9 на RAMPS (пин можно настроить и другой, удобный) И далее есть вот такие настройки По сути указывается основные настройки для CNC, а также можно завести специальные кнопки управления станком. Добиваемся компиляции кода без ошибок, заливаем в плату и проверяем. А вот что можно «вытворять» на этом фрезере.В планах сделать корпус для электроникиПосле окончательной сборки планируется все оформить в корпус с разъемами и вентиляцией. Например, вот такой, сборный Или раздельный для дисплея и RAMPS+MEGA Выводы:
- Если планируется установка NEMA23, то можно взять комплект электроники с DRV8825. Экран можно взять Full graphic smart controller.
- Можно сделать Wi-Fi управление или специальный планшет на windows.
- В целом данный комплект позволяет значительно расширить возможности самодельного станочка, а в перспективе – и функционал в виде лазера или дополнительной оси.
- После модернизации я планирую докинуть еще и лазерную головку, будет выжигать в меру возможностей.
К сожалению, еще не все комплектующие у меня в наличии (подводят китайские товарищи), поэтому полномасштабного фото-видео готового станочка не будет. Фотографии частично предоставлены с форума (с разрешения автора). Чуть попозже можно будет и топик в сообщество DIY на Mysku запилить, с подробным раскладом, что и где заказывать. Полезные ресурсы: Настройка тока драйверов а4988 можно посмотреть вот тут.Форум с описанием станка и инструкциямиКупоны на скидкуДо конца марта действует купон на ассортимент магазина скидка 6% на некоторые товары. И специальный купон для этого комплекта Mega2560+Ramps на скидку 10% Спасибо за уделенное внимание! Про 3Д принтеры написано уже воз и малая тележка, но когда начинаешь собирать самостоятельно — сталкиваешься с кучей вопросов и проблем, которые нигде не описаны… Данный пост — маленькое пособие для начинающих РепРаперов (ну и остальным что-то пригодится) про шишки, которые я набивал при сборке своего RepRap Prusa Mendel.
Часть 0, или чем и как печатать
Принтеры класса РепРап — печатают, в основном, пластиковым прутком. Это не значит, что они ограничены только им: есть модификации под шоколад, олово, крепление фрезы и т.д. Но основное — пластиковый пруток. Печать сводится к тому, что мы подаём этот самый пруток с помощью экструдера в нагревательную головку, там он плавится и под давлением запихиваемого в головку прутка — выдавливается через сопло. Получившуюся тонкую струйку пластика мотаем по X-Y координатам, приклеивая сначала к столу, а потом — к предыдущему слою. Тут существуют несколько тонкостей: 1. Если сам к себе пластик прилипает отлично, то вот к столу — проблемно. Поэтому стол нагревают и покрывают «каптоном» — термоскотчем янтарного цвета. ФЗ почему так, но эксперименты показывают, что к нему липнет лучше всего. 2. Методика не позволяет печатать нависающие детали. Пруток просто не успевает застывать в воздухе и провисает… Решения есть, понятное дело, но учитывать надо. Итак, основных игроков на рынке пластика для принтеров два: ABS и PLA.
ABS



PLA



«Тёмная лошадка» — PVA
Свежачёк — в продаже появился буквально на днях. Инфы мало, известно только то, что растворяется в воде. Применяется как разделитель при печати составных деталей, когда, к примеру, печатается гайка, которая сразу надета на болт: после печати вымывается разделитель и гайка спокойно крутится на болту!Плюсы: растворяется в воде, что полезно в некоторых вещах.Минусы: растворяется в воде, что вредно в совершенно других ситуациях. И дорогой, скотина! Дороже ПЛА!
Резюме:
Печатают чаще всего АБСом: он и дешевле, и надёжнее… Остальные — под ситуацию: к примеру, народ навострился из PLA печатать линейные подшипники для принтеров.
Глава 1. Разница между разными моделями принтеров
Про всяческие оптические и т.п. говорить не буду — там принцип совсем другой. Тут речь пойдёт про «прутковые» принтеры, которых накопилось уже куча моделей и в которых народ потихоньку начинает плавать.
 3d принтер RepRap Prusa i3 — плюсы и минусы
3d принтер RepRap Prusa i3 — плюсы и минусыДарвин
В начале было слово и слово это было «Дарвин». Возможно были и другие какие-то прототипы, но первым РепРапом стал именно он. В Дарвине печатающая головка двигалась по X-Y осям на вершине «куба», а платформа по мере печати опускалась вниз на четырёх шпильках по краям, связанных с мотором зубчатыми ремнями. В дальнейшем РепРап принтеры практически ушли от этой практики: её унаследовал только «внебрачный сын» Дарвина — Maker Bot Thing-o-matic.
Maker Bot Thing-o-matic
Уход от концепции «самокопирующихся» принтеров. Мейкер-Боты почти на 90% сделаны из фанеры лазерной резкой. В остальном — довольно близки по концепции с Дарвином: опускающаяся платформа и головка движется по X-Y. Говорят, что такая компоновка даёт МейкерБотам и их клонам большую точность печати. Возможно — спорить не буду. Но как минус — напечатать на МейкерБоте детали к МейкерБоту для друга у вас не выйдет!
Мендель
Т.н. «Оригинальный» или «Классический». Как это не смешно, но концепция Дарвина не прижилась среди РепРапов: Мендель стал «треугольным», рабочий стол начал ездить только по Y-оси, а печатающая головка — по X и Z. Причём ось Z обслуживал только один мотор с ременной передачей на пару шпилек… Говорят, что оригинальный Мендель был жутко сложен в наладке и сборке. Поэтому сейчас основной игрок — его потомок из Чехии:
Мендель Прюша (Prusa)
Кто-то может возмутиться такой транскрипцией, но дело в том, что это не английский, это Чешский. Автором модификации является чех Йозеф Прюша. По мнению многих — Прюша-Мендель более прост в сборке. В принципе — он сильно похож на оригинальный Мендель, но… Одна из основных вещей — Джозеф отказался от ременной передачи на шпильки для Z-оси и поставил два мотора, непосредственно соединённых с соответствующими шпильками.
Мендель Макс
Если Дарвин, Мендель и Прюша собираются на основе шпилек М8, то Мендель Макс — из фигурного профиля. По-идее — даёт большую жёсткость конструкции, но если шпилька продаётся по 36 рублей за метр в том-же строймаркете, то нужный профиль ещё и найти надо где-то!!! Авторы в какой-то мере пытаются упирать на то, что «Зато мы можем этот профиль печатать на самом принтере!» На практике — ну явно-же размеры печатной области не дадут места для профиля нужной длины!
Орка
Венец простоты в сборке: минимум деталей, минимум «непечатных» деталей и вообще. Существуют фанерные варианты этого принтера от авторов, но… Один из главных плюсов — он варьируется в размерах и за счёт отсутствия рамы — сильно компактен!
Глава 2. Как и чем рулить.
В минимальной конфигурации в принтере наличествуют следующие вещи:
- 4 (5) шаговых моторов — X-Y-Z+экструдер
- Датчики температуры для сопла и нагревательного стола
- Нагреватели стола и головки
- Три концевых датчика на осях в нуле
Ну и прочие, типа второго экструдера, которому тоже надо нагреватель и термистор, концевиков в «максимуме», вентилятора для охлаждения головки и т.п. Ясное дело — всё это просто так к компьютеру подключить нельзя, поэтому используется «промежуточное звено» в виде контроллера. «Проблема» в том, что нарисованную в 3Д студии модель просто так в контроллер не запихнёшь: ему на такое 3Д мозгов не хватит — максимум что он умеет — крутить моторами и ловить инфу с датчиков. А что хотели от AVR-ок? Поэтому уже давно был принят т.н. G-код для управления фрезерками и т.п. станками с ЧПУ. Собственно Г-код — это набор простых команд в стиле «Переместить по X-Y на… со скоростью …», «Выставить температуру… на …», «Двигаться по… до концевика» и т.п. Конвертацией моделей в Г-код занимается специальная программа на компе — Слайсер. К ней мы ещё вернёмся. Г-код на сайтах обычно не выкладывают, т.к. он чаще всего заточен под конкретный принтер.Совет: если деталь собираетесь повторять в дальнейшем — сохраните Г-код! Конвертация — довольно длительный процесс! В дальнейшем — управляющая программа потихоньку стравливает Г-код контроллеру и тот его выполняет. Или, в некоторых модификациях контроллера, устанавливается картридер для Микро-SD и прога заливает Г-код на карточку целиком, после чего компьютер можно даже и отключить: в таких случаях к контроллеру обычно подключают ЖК-дисплей и несколько кнопок для управления и контроля. Пройдёмся по компонентам:
Шаговые двигатели NEMA-17
Многие новички считают, что это — название какой-то конкретной модели. Так вот: это не так! Это стандарт под «посадочное место» шаговиков! Конкретная модель — целиком и полностью зависит от собирающего! Краткий «ликбез» про шаговые движки: Если простой двигатель работает по принципу «Подали ток и завертелся», то шаговики — имеют несколько обмоток и при подаче на одну из них тока двигатель фиксируется в определённом положении. Подали на следующую и отключили на этой — он сделал шаг вперёд. Переключили на предыдущую — шаг назад. Управляющих проводов, обычно, четыре. Ток подаётся на соседнюю пару проводов, потом на «этот + следующий» и т.д. Это т.н. «шаговый» или «полно-шаговый» режим. Большая часть шаговиков — на 200 шагов. Т.е. он должен сделать 200 шагов, что-бы повернуть на 360 градусов ротор. Много это или мало? Полный оборот — для оси Z это перемещение на миллиметр. 200 шагов — делят его на отрезки по 0.005 мм. Вроде неплохо, но всегда хочется БОЛЬШЕГО! Поэтому народ придумал «полушаговый» режим: ток подаётся не на два, а на три соседних провода, т.е. — на пару соседних обмоток одновременно! При этом движок «застывает» между двумя шагами. Затем одна из обмоток отключается и он переходит на неё, потом включается следующая при этой работающей — он переезжает на пол-шага вперёд… И т.д. Как не трудно посчитать — шагов становится 400! Но… «Хочим ещё!» завопил народ и придумал «Микрошаговый» режим! В шаговом — мы включаем отдельные обмотки, в полу-шаговом — подаёём на соседние напряжение «поровну»… А что будет, если на одну обмотку подать раза в два меньше? А в три? Прааавильно! Ротор остановится не посредине между двумя обмотками, а «с закосом» в сторону большей!!! Таким макаром шаг делят на 4, 8 и 16 частей (можно и больше, но честно скажу — выше «шестнадцатой» — не видел!)!!! Толку от этого не особо, казалось-бы, но если в шаговом режиме движок «щёлкает»при переходе между шагами, то деление шага делает его более бесшумным! На делителе «16» принтер работает так, что из соседней комнаты при открытых дверях его не слышно!!! Проблема в том, что если для шагового и полу-шагового режимов достаточно четырёх «мостов», то «микрошаг» — более сложен. Поэтому некоторые фирмы наладили выпуск «контроллеров шаговых двигателей».
 Как сделать самодельное приспособление для заточки ножей своими руками
Как сделать самодельное приспособление для заточки ножей своими рукамиКонтроллер шагового двигателя
Логика действия контроллера мотора проста до безобразия: подаём питание для логической части и для движка, после чего — на пару управляющих контактов подаётся направление и сигнал «шаг»: есть «шаг» — мотору выдаются напряжения для перемещения ротора на шаг, полу-шаг или микро-шаг, в зависимости от того, что мы задали перемычками.Схема, если кому интересно. Контроллеры шаговиков в последнее время бывают обычно с режимом 1/16, но можно напороться на 1/8: купил тут на Ебае, не посмотрел, а оказалась «восьмёрка»… «Глазастики» заметят, что на контроллере присутствует переменный резистор. Зачем? А для регулировки рабочего напряжения шаговиков: они, увы, бывают и под 12 вольт, и под 4 и под 8 и т.п.Как настроить? Выставляяем регулятор примерно на середину. (если есть сомнения — можно выкрутить в крайнее левое положение (против часовой стрелки)) После подключения моторов (на собранном принтере!) включаем ОДИН из них и даём из программы команду на перемещение. Если тянет — хорошо. Если тянет и после остановки гудит — крутим регулятор против часовой, пока не перестанет. Если не тянет — крутим по часовой. Опять запускаем движение и повторяем по-необходимости. Нам нужен баланс между «Не гудит» и «нормально ездит»! После настройки одного движка — даём команду на отключение моторов и повторяем со следующим!
Концевые датчики
Нужны для определения нуля, что-бы остановить движки до того, как они что-нить разнесут. Бывают оптическими и нажимными. Оптический — оптопара, попадая в щель которой «флажок» концевика подаёт сигнал на контроллер. Нажимной — тупо кнопка. Микрик… Ясен пень — оптический точнее. Но для X-Y точность не особо нужна, так что можно съэхогномить…
Термисторы
Термистор нужен для замера температуры печатающей головки и нагревательного стола. Принцип прост: у него меняется сопротивление в зависимости от температуры… Итого — меряем сопротивление и получаем температуру! Просто? Ну-ну… Проблем там две: 1. Рабочий диапазон температур до 300 градусов. Нам столько не особо нужно, но ниже — только 200 градусные! Я так накололся, в итоге на 220 градусах мой термистор «заснул»… 2. Таблица калибровки: у термисторов не везде и не особо линейные зависимости… Поэтому народ их КАК-ТО калибрует и выкладывает таблицы… Итого: термистор лучше брать один из тех, для которых есть таблицы зависимостей!Замечание: Провода до термисторов должны быть минимально возможной длины!!! Помните, что мы меряем СОПРОТИВЛЕНИЕ в проводнике и длинные провода — это лишние Омы в цепи!!!
Нагреватель экструдера
«Традиционно» народ для этих целей использовал обычно нихромовую проволоку. Но это довольно муторно её наматывать, отмерять и т.д. Да её напряжно даже и купить-то!!! Поэтому народ для этих целей начал юзать резисторы определённых типов… Фишка в том, что некоторые резисторы, по факту, та-же нихромовая проволока, только в корпусе! Ну и как следствие — греются при подаче напряжения что твой утюг…Замечание: Помните, что рабочие температуры для пластика — порядка 200 градусов и выше! А припой обычно плавится при 100 градусах! И что получается? Праааавильно — отвалятся ваши провода к чёртовой бабушке!!! Используйте обжимную фигню, что-бы соединить провода и контакты нагревателя: клеммы коннекторов и т.п. Как вариант, конечно, высокотемпературные припои, но это довольно муторный процесс…
Нагреватель рабочего стола
Некоторые используют нихромовую проволоку, приклеенную снизу к листу алюминия, другие — клеят туда стопку из тех самых резисторов, что в нагревателе… А третьи — пошли по пути наименьшего сопротивления, посчитали то самое сопротивление и в редакторе нарисовали на фольгированном гетинаксе плату с длиииинной кривой дорожкой, которая соответствует по свойствам нихромовой проволоке! Итого — довольно «копеечное» и красивое решение!Совет: Не клейте каптоновый скотч прямо на термостол! Дело в том, что скотч иногда надо менять, а клеить аккуратно в принтере его СЛОЖНО! Да и иногда надо вынуть деталь вместе с основой, что-бы отодрать её спокойно… Поэтому вырезаем из фольгированного гетинакса прямоугольник по форме термостола, клеим на него термоскотч и прикрепляем к столу металлическими канцелярскими прищепками!!! Надо вынуть? Отцепили прищепки и вынули! Профит! С электронными частями принтера практически всё. Единственное, что ещё можно сказать, прежде чем перейти к контроллеру:Совет: Купите термоклей «Радиал»!!! Это хрень, типа процессорной термопасты, но он ПРИКЛЕИВАЕТ!!! Термисторы приклеивать лучше им, им-же — вклеить нагреватель. Ну и я его заодно как изоляцию для проводов у нагревателя юзаю… Итак,
Контроллер принтера
В основном, в последнее время контроллеры принтера делают совместимым с Ардуино IDE, под который и написаны практически все прошивки. Основные «игроки» — RAMPS, Sanguinololu и разные версии Generation Electronics.
Generation Electronics
Тут надо заметить, что номера в Gen — это не версии а разные подходы. Gen 3 — плата контроллера и контроллеры моторов разнесены, соединение проводами. Если хочется бардак на столе — ваш выбор. Gen 6 — контроллеры моторов (микросхемы) впаяны в плату управления намертво. Сгорит один — чини всю плату, т.к. там SMD монтаж этих самых микросхем. Gen 7 — контроллеры моторов Pololu в «кроватках». Плюс питание от ATX БП и сборка без SMD компонентов. ATmega644 как процессор.
Sanguinololu
Сочетание Sanguino (клон Ардуино) и Pololu (контроллеров моторов). В принципе — близкий родственник Gen 7, но более компактный монтаж. Как минус — Gen7 рассчитан на «лазерно-утюжные» платы, а тут — не разбежишься…
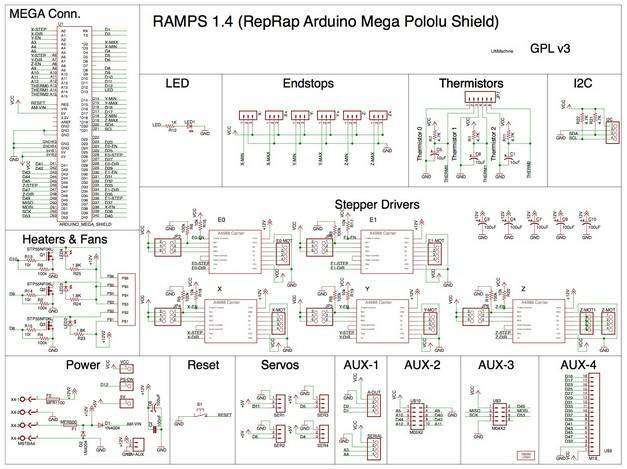
RAMPS
RepRap Arduino Mega Pololu Shield — как понятно из названия — это «шелд» между Ардуино и контроллерами моторов Pololu. «Мой выбор». В чём плюшки:
 Как сделать микроскоп для паяльных работ
Как сделать микроскоп для паяльных работ- В основе стандартная Ардуина Мега.
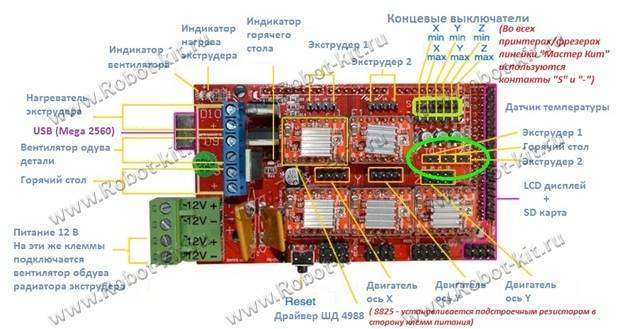
- Поддерживает ПЯТЬ независимых контроллеров моторов! В других — обычно обходятся четырьмя: три на оси и четвёртый — экструдер. Пятый контроллер — для второго экструдера.
- Два выхода на нагреватели экструдеров + отдельный на нагревательный стол. Т.е. — можно на экструдеры подавать пластик с разными температурами!!!
- Три входа для термисторов (2 экструдера+стол)
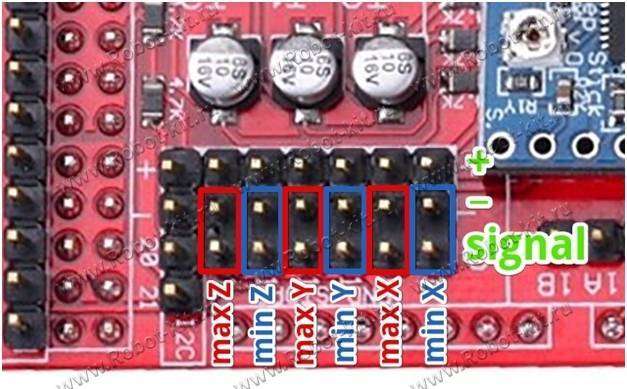
- Шесть входов для концевых датчиков (можно поставить только три, но при желании — можно установить и максимальные!)
- I2C и SPI для разнообразных дополнительных функций.
- Коннектор для модуля SD-карты.
- Ну и кучкудук пока не используемых фишек…
Минусы: платить приходится за Ардуину, шелд и контроллеры моторов. Ну и кучка SMD монтажа, что не всем в кайф… Пока что — мне она больше всех нравится, но, говорят, появилось несколько конкурентов… Часть 1 подошла к концу. Во второй части вы узнаете: Что такое Слайсер и нафига он нужен? Заглядываем деталям под «юбку» и наводим «мосты». Что такое экструдер, как он работает и что из себя представляет печатающая головка. Ну и прочее, о чём вспомню в процессе!
Шилд RAMPS 1.4 подключение к Arduino Mega.
Рассмотрим подключение платы Shield-RAMPS-1.4 на примере 3D принтера Mendel90.
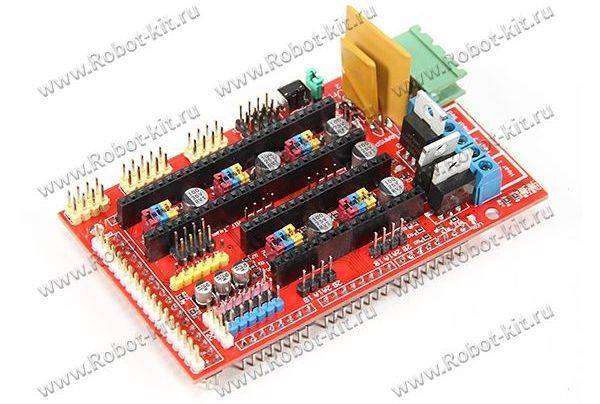
RAMPS 1.4 это шилд (надстройка) для Arduino Mega 2560. Ардуино преобразует G-коды в сигналы и управляет 3D принтером посредством силовой части — RAMPS 1.4.
Плата RAMPS 1.4 одевается поверх Arduino и все подключения, кроме USB, осуществляются через неё. Питание 12В на Arduino подаётся через RAMPS 1.4.
Подробнее о товаре «Шилд RAMPS 1.4 плата контроллера для 3D принтера (Shield-RAMPS-1.4)» =>>
Двухэкструдерная схема подключения
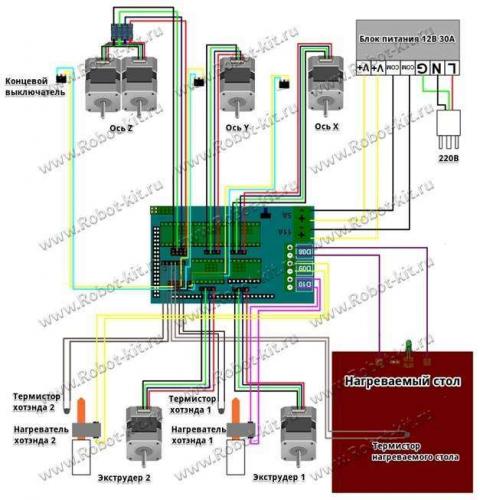
Схема подключения с одним экструдером
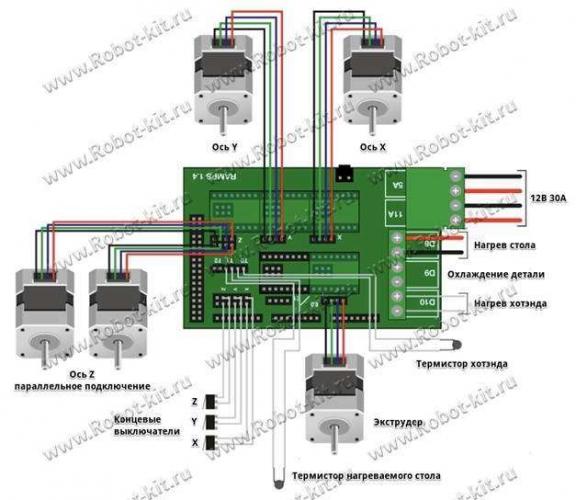
Обычно используют билинейные (четыре провода) шаговые двигатели на 1,7 А типоразмера Nema 17. Провода желательно свить в косички для защиты от наводок.
Шаговые двигатели для оси Z можно подключать двумя способами:
- Первый способ. Параллельное подключение пары шаговых двигателей на одну ось Z — это когда штекер каждого шагового двигателя подключается к своему индивидуальному разъему на плате RAMPS 1.4. Такой способ подключения шаговых двигателей для оси Z является стандартным подключением к плате RAMPS 1.4.Следует заметить, что при параллельном (стандартном) подключении могут возникать проблемы с рассинхронизацией шаговых двигателей, если будет иметь место разница в сопротивлении обмоток у подключаемой пары шаговых двигателей.
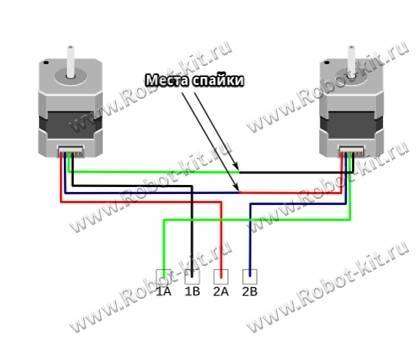
-
Второй способ.Второй способ это подключить шаговые двигатели последовательно одним штекером по схеме показанной ниже. При таком последовательном подключении двух шаговых двигателей по оси Z проблем с рассогласованием пары движков уже не будет наблюдаться.

Питание на RAMPS 1.4 подаётся от блока питания 12В 30А.
Подключение концевых выключателей
Шилд Shield-RAMPS-1.4 — одна из самых распространённых плат для сборки 3D принтеров.

Нажать и посмотреть схему RAMPS 1.4 =>>
Эта «материнская» плата позволит Вам без проблем коммутировать все комплектующие воедино.
Рекомендуемые товары Используемые источники:
- https://mysku.ru/blog/china-stores/50409.html
- https://habr.com/post/140873/
- https://robot-kit.ru/article/ramps-3d-printer/

 3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать
3D принтер Anycubic Kossel Pulley : собираем китайский комплект. Инструкция для тех, кто не боится попробовать Схема импульсного преобразователя SEPIC: два варианта выполнения
Схема импульсного преобразователя SEPIC: два варианта выполнения Самодельный принтер на SCARA механике
Самодельный принтер на SCARA механике Nullblog
Nullblog